
“A volumetric method for building complex models from range images” by Curless and Levoy
Conference:
Type:
Title:
- A volumetric method for building complex models from range images
Presenter(s)/Author(s):
Abstract:
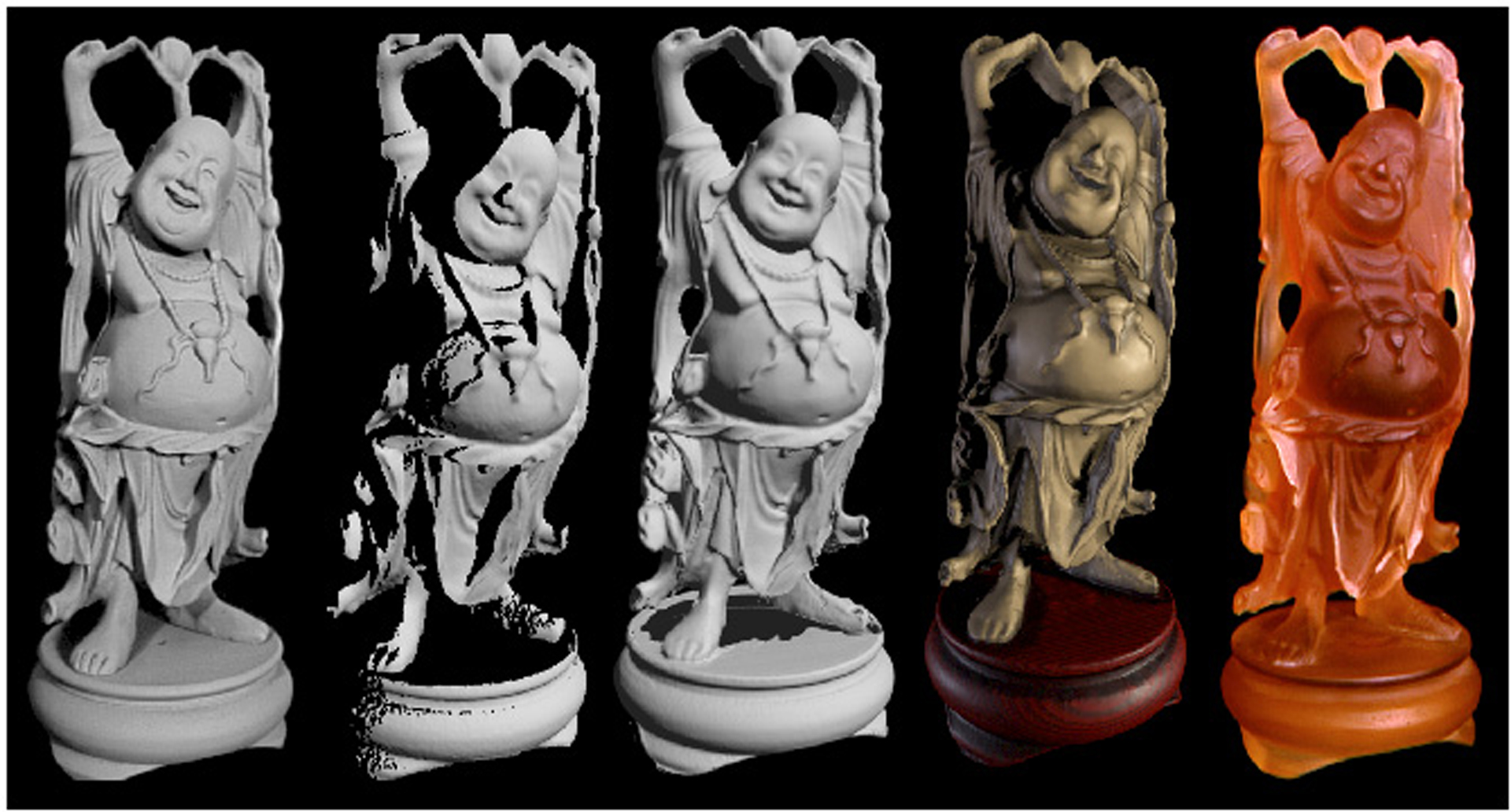
A number of techniques have been developed for reconstructing surfaces by integrating groups of aligned range images. A desirable set of properties for such algorithms includes: incremental updating, representation of directional uncertainty, the ability to fill gaps in the reconstruction, and robustness in the presence of outliers. Prior algorithms possess subsets of these properties. In this paper, we present a volumetric method for integrating range images that possesses all of these properties. Our volumetric representation consists of a cumulative weighted signed distance function. Working with one range image at a time, we first scan-convert it to a distance function, then combine this with the data already acquired using a simple additive scheme. To achieve space efficiency, we employ a run-length encoding of the volume. To achieve time efficiency, we resample the range image to align with the voxel grid and traverse the range and voxel scanlines synchronously. We generate the final manifold by extracting an isosurface from the volumetric grid. We show that under certain assumptions, this isosurface is optimal in the least squares sense. To fill gaps in the model, we tessellate over the boundaries between regions seen to be empty and regions never observed. Using this method, we are able to integrate a large number of range images (as many as 70) yielding seamless, high-detail models of up to 2.6 million triangles.
References:
1. C.L. Bajaj, F. Bernardini, and G. Xu. Automatic reconstruction of surfaces and scalar fields from 3D scans. In Proceedings of SIGGRAPH ’95 (Los Angeles, CA, Aug. 6-11,1995), pages 109-118. ACM Press, August 1995.
2. J.-D. Boissonnat. Geometric structures for three-dimensional shape representation. ACM Transactions on Graphics, 3(4):266-286, October 1984.
3. C.H. Chien, Y.B. Sire, and J.K. Aggarwal. Generation of volume/surface octree from range data. In The Computer Society Conference on Computer Vision and Pattern Recognition, pages 254-60, June 1988.
4. C.I. Connolly. Cumulative generation of octree models from range data. In P1vceedings, Intl. Conf. Robotics, pages 25-32, March 1984.
5. B. Curless. Better optical triangulation and volumetric reconstruction of complex modelsfivm range images. PhD thesis, Stanford University, 1996.
6. B. Curless and M. Levoy. Better optical triangulation through spacetime analysis. In P1vceedings of lEEE International Conference on Computer Vision, pages 987- 994, June 1995.
7. A. Dolenc. Software tools for rapid prototyping technologies in manufacturing. Acta Polytechnica Scandinavica: Mathematics and Computer Science Series, Ma62:l-lll, 1993.
8. D. Eberly, R. Gardner, B. Morse, S. Pizer, and C. Scharlach. Ridges forimage analysis. Journal of Mathematical Imaging and Vision, 4(4):353-373, Dec 1994.
9. H. Edelsbrunner and E.R Mticke. Three-dimensional alpha shapes. In Workshop on Volume Visualization, pages 75-105, October 1992.
10. A. Elfes and L. Matthies. Sensor integration for robot navigation: combining sonar and range data in a grid-based representation. In P~vceedings of the 26th IEEE Conference on Decision and Contlvl, pages 1802-1807, December 1987.
11. H. Gagnon, M. Soucy, R. Bergevin, and D. Laurendeau. Registration of multiple range views for automatic 3-D model building. In P~vceedings 1994 IEEE Computer Society Conference on Computer Vision and Pattern Recogn#ion, pages 581- 586, June 1994.
12. E. Grosso, G. Sandini, and C. Frigato. Extraction of 3D information and volumetric uncertainty from multiple stereo images. In P~vceedings of the 8th Eu~vpean Conference on Artificial Intelligence, pages 683-688, August 1988.
13. R Hebert, D. Laurendeau, and D. Poussart. Scene reconstruction and description: geometric primitive extraction from multiple viewed scattered data. In P~vceedings of lEEE Confelvnce on Computer Vision and Pattern Recognition, pages 286-292, June 1993.
14. A. Hilton, A.J. Toddart, J. Illingworth, and T. Windeatt. Reliable surface reconstruction from multiple range images. In Fourth Emvpean Confe~vnce on Cornputer Vision, volume I, pages 117-126, April 1996.
15. Tsai-Hong Hong and M. O. Shneier. Describing a robot’s workspace using a sequence of views from a moving camera. IEEE Transactions on Pattern Analysis and Machine Intelligence, 7 (6):721-726, November 1985.
16. H. Hoppe, T. DeRose, T. Duchamp, J. McDonald, and W. Stuetzle. Surface reconstruction from unorganized points. In Computer Graphics (SIGGRAPH ’92 P~vceedings), volume 26, pages 71-78, July 1992.
17. V. Krishnamurthy and M. Levoy. Fitting smooth surfaces to dense polygonmeshes. In these proceedings.
18. R Lacroute and M. Levoy. Fast volume rendering using a shear-warp factorization of the viewing transformation. In Proceedings of SIGGRAPH ’94 (Orlando, FL, July 24-29,1994), pages 451-458. ACM Press, July 1994.
19. A. Li and G. Crebbin. Octree encoding of objects from range images. Pattern Recognition, 27(5):727-739, May 1994.
20. W.E. Lorensen and H. E. Cline. Marching cubes: A high resolution 3D surface construction algorithm. In Computer Graphics (SIGGRAPH ‘ 87 Proceedings), volume 21, pages 163-169, July 1987.
21. W.N. Martin and J.K. Aggarwal. Volumetric descriptions of objects from multiple views. IEEE Transactions on Pattern Analysis and Machine Intelligence, 5 (2): 150- 158, March 1983.
22. C. Montani, R. Scateni, and R. Scopigno. A modified look-up table for implicit disambiguation of marching cubes. Visual Computer, 10(6):353-355,1994.
23. M. Potmesil. Generating octree models of 3D objects from their silhouettes in a sequence of images. Computer Vision, Graphics, and lmage Processing, 40(1):1- 29, October 1987.
24. M. Rutishauser, M. Stricker, and M. Trobina. Merging range images of arbitrarily shaped objects. In P1vceedings 1994 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, pages 573-580, June 1994.
25. M. Soucy and D. Laurendeau. A general surface approach to the integration of a set of range views. IEEE Transactions on Pattern Analysis and Machine Intelligence, 17(4):344-358, April 1995.
26. G. Succi, G. Sandini, E Grosso, and M. Tistarelli. 3D feature extraction from sequences of range data. In Robotics Research. Fifth International Symposium, pages 117-127, August 1990.
27. R. Szeliski. Rapid octree construction from image sequences. CVGIP: Image Understanding, 58(1):23-32, July 1993.
28. G.H Tarbox and S.N. Gottschlich. IVIS: An integrated volumetric inspection system. In P1vceedings of the 1994 Second CAD-Based Vision Workshop, pages 220- 227, February 1994.
29. G. Taubin. A signal processing approach to fair surface design. In P~vceedings of SIGGRAPH ’95 (Los Angeles, CA, Aug. 6-11,1995), pages 351-358. ACM Press, August 1995.
30. G. Turk and M. Levoy. Zippered polygon meshes from range images. In P~vceedings of SIGGRAPH ’94 (Orlando, FL, July 24-29, 1994), pages 311-318. ACM Press, July 1994.
31. Robert Weinstock. The Calculus of Variations, with Applications to Physics and Engineering. Dover Publications, 1974.