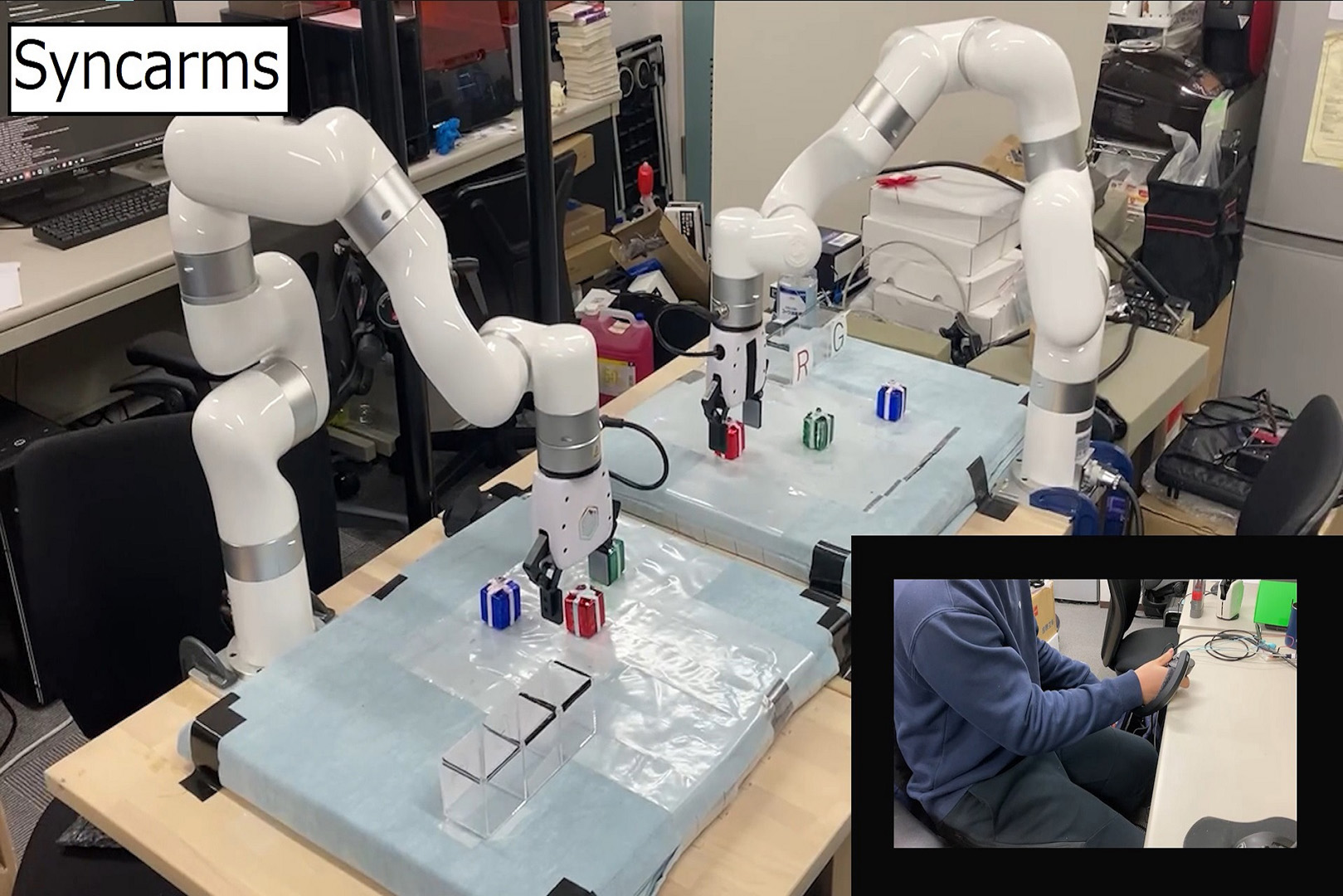
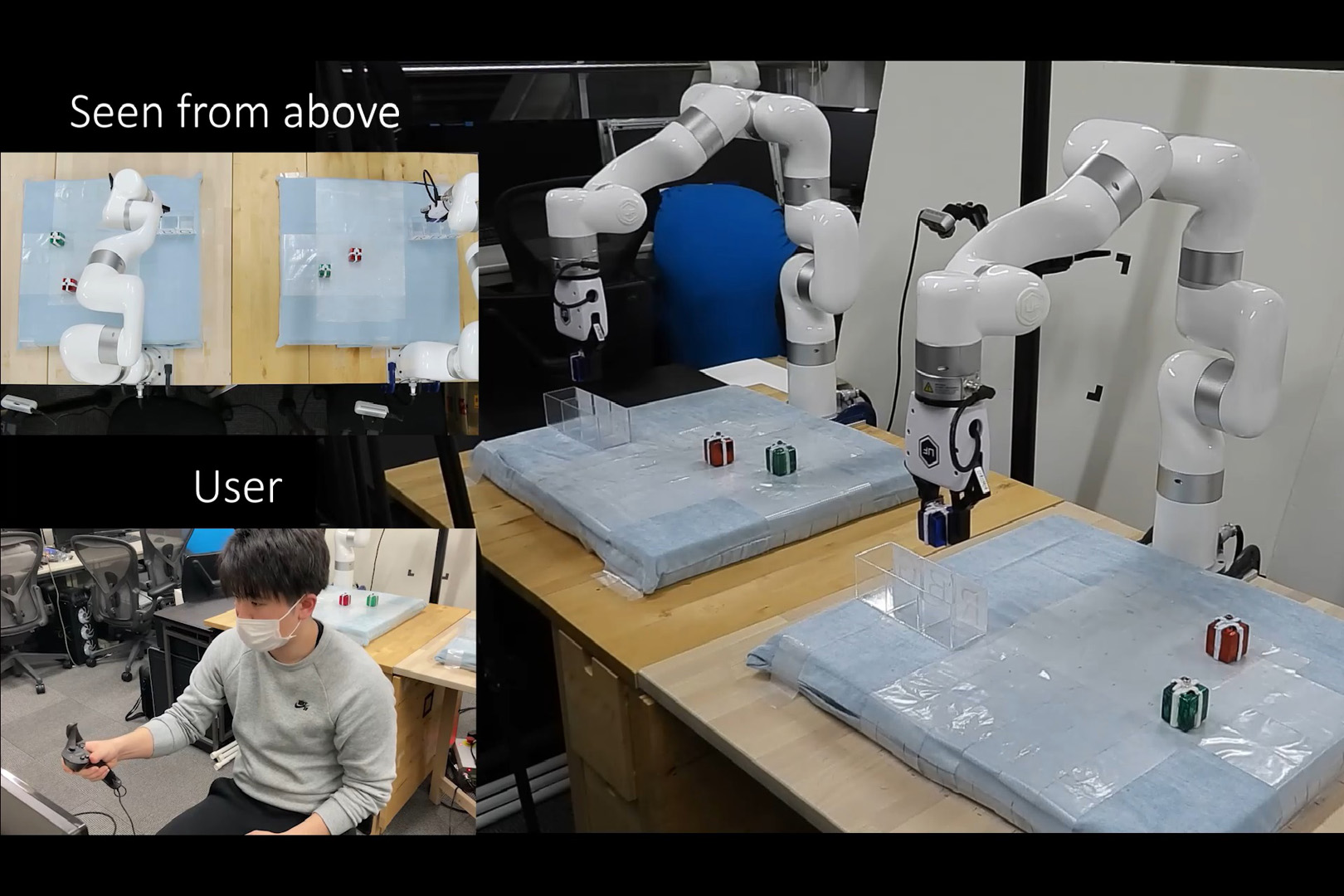
“SyncArms: Gaze-driven Target Object-oriented Manipulation for Parallel Operation of Robot Arms in Distributed Physical Environments” by Kawamura, Kasahara, Fukuoka, Masai, Kondo, et al. …
Conference:
- SIGGRAPH 2023
-
More from SIGGRAPH 2023:


Type(s):
Entry Number: 18
Title:
- SyncArms: Gaze-driven Target Object-oriented Manipulation for Parallel Operation of Robot Arms in Distributed Physical Environments
Presenter(s):
Description:
We present a novel system for a manipulation of multiple bodies by using gaze tracking and object recognition, which simultaneously overcomes two problems when performing a parallel task: positional problem and decay of embodiment over the extended bodies.
Additional Images: