
“Transtiff: Haptic Interaction With a Stick Interface With Various Stiffness” by Ogura, Ito, Yoshida and Tanaka
Notice: Pod Template PHP code has been deprecated, please use WP Templates instead of embedding PHP. has been deprecated since Pods version 2.3 with no alternative available. in /data/siggraph/websites/history/wp-content/plugins/pods/includes/general.php on line 518
Conference:
- SIGGRAPH 2023
-
More from SIGGRAPH 2023:
Notice: Array to string conversion in /data/siggraph/websites/history/wp-content/plugins/siggraph-archive-plugin/src/next_previous/source.php on line 345

Notice: Array to string conversion in /data/siggraph/websites/history/wp-content/plugins/siggraph-archive-plugin/src/next_previous/source.php on line 345


Type(s):
Entry Number: 19
Title:
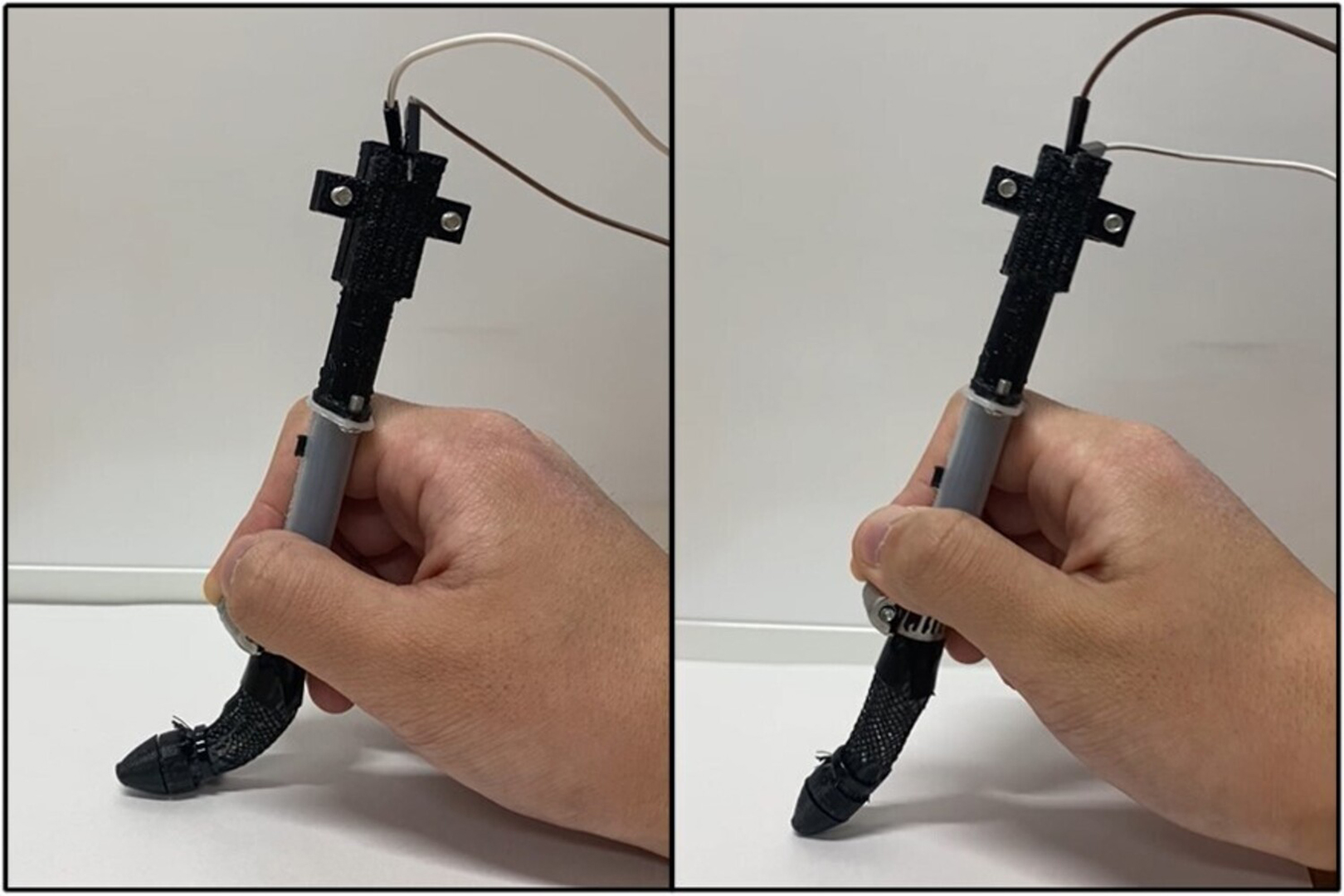
- Transtiff: Haptic Interaction With a Stick Interface With Various Stiffness
Presenter(s):
Description:
We present a novel system for a manipulation of multiple bodies by using gaze tracking and object recognition, which simultaneously overcomes two problems when performing a parallel task: positional problem and decay of embodiment over the extended bodies.