
“Proxy Clouds for RGB-D Stream Processing: An Insight” by Kaiser, Zepeda and Boubekeur



Conference:
Type(s):
Entry Number: 20
Title:
- Proxy Clouds for RGB-D Stream Processing: An Insight
Presenter(s)/Author(s):
Abstract:
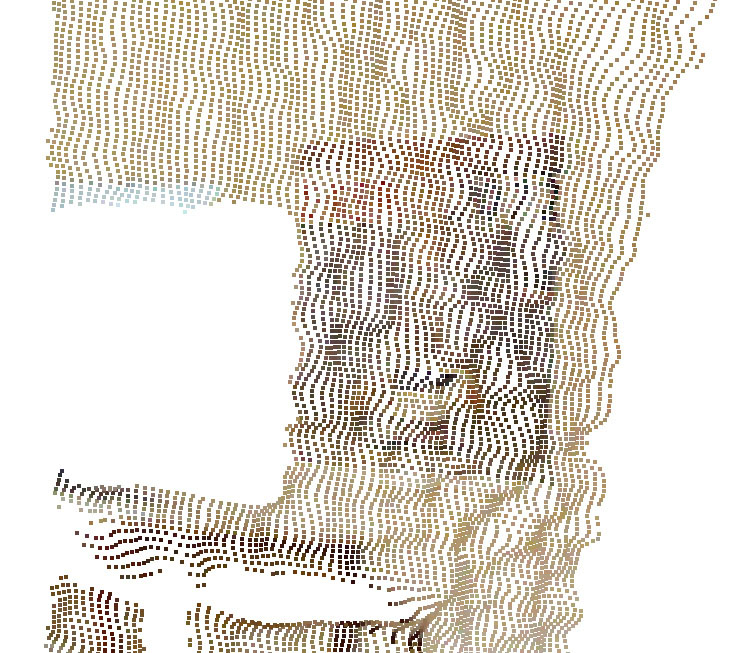
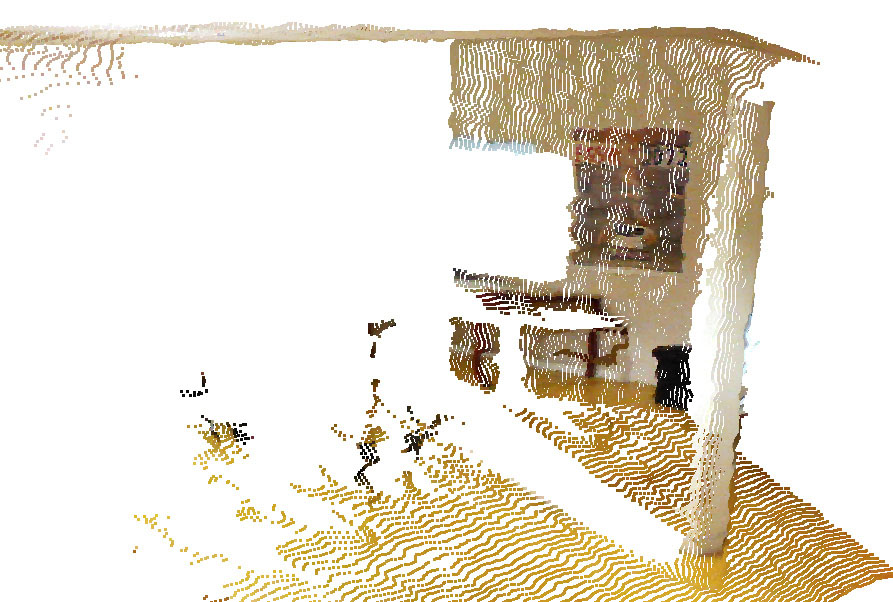
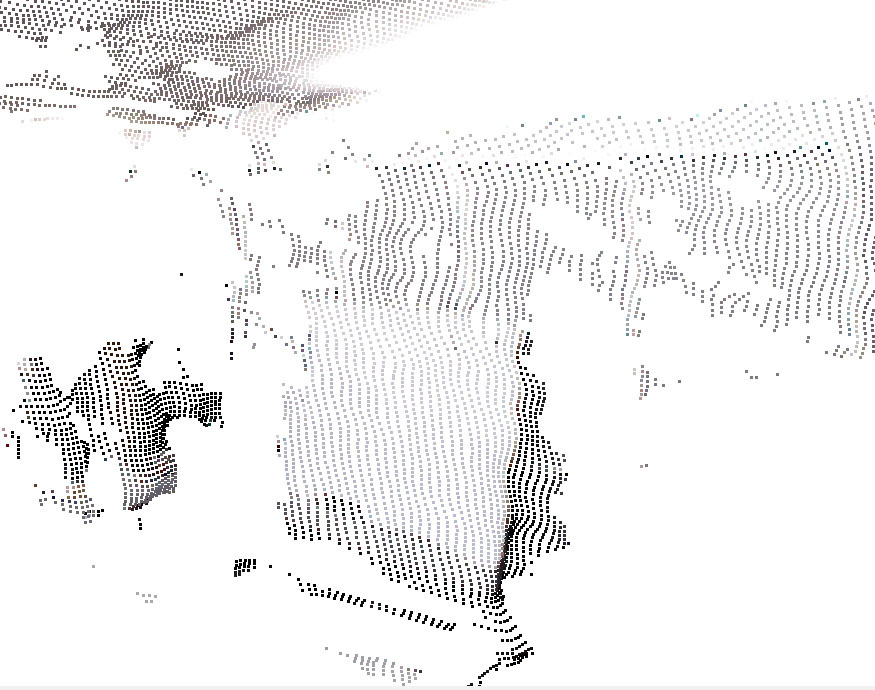
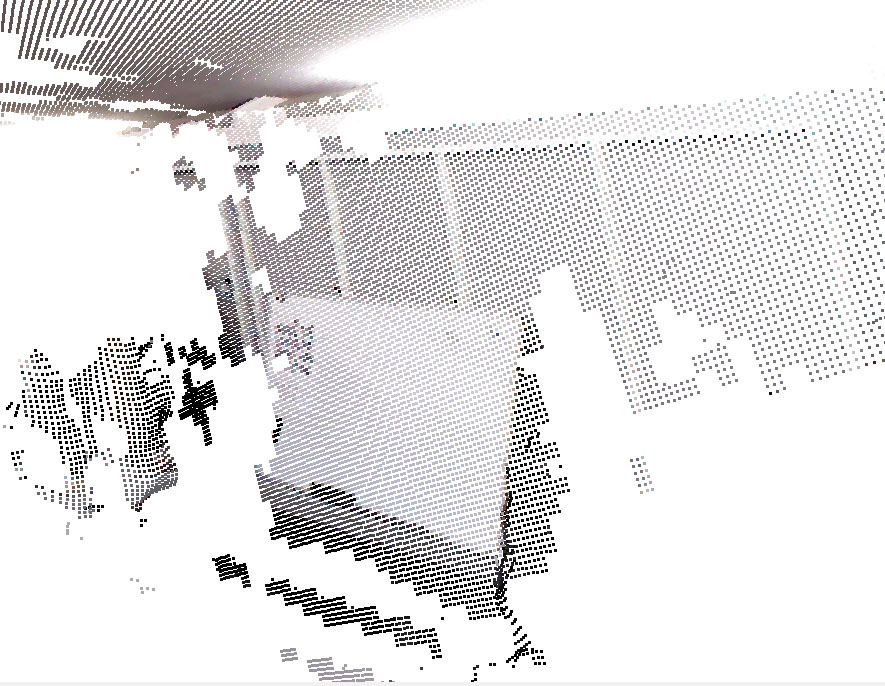
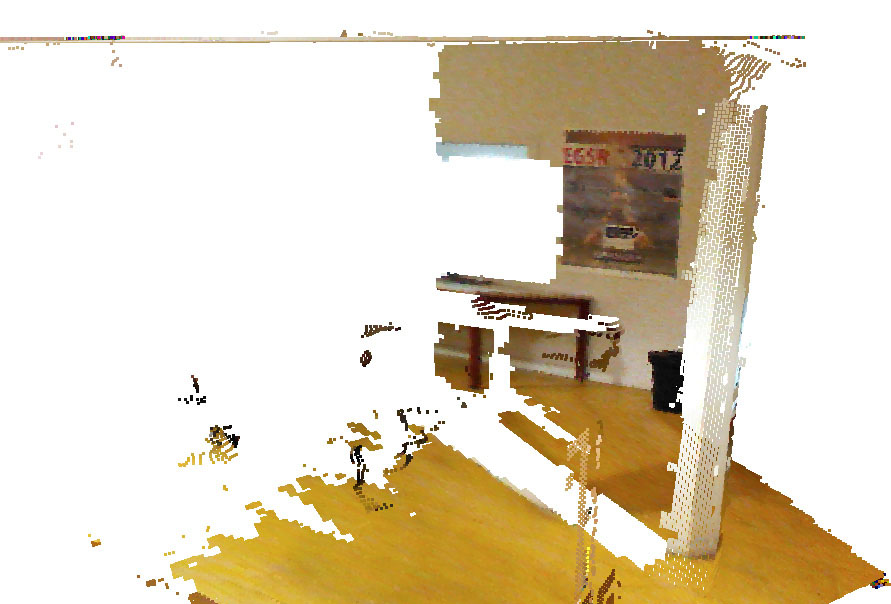
Modern RGB-D sensors are widely used for indoor 3D capture, with applications ranging from modeling to robotics, through gaming. Nevertheless, their use is limited by their low resolution, with frames often corrupted with noise, missing data and temporal inconsistencies. In order to cope with all these issues, we present Proxy Clouds, a multiplanar superstructure for unified real-time processing of RGB-D data. By generating and updating through time a single set of rich statistics parameterized over planar proxies from raw RGB-D data, several processing primitives can be applied to improve the quality of the RGB-D stream on-the-fly or lighten further operations. We illustrate the use of Proxy Clouds on several applications, including noise and temporal flickering removal, hole filling, resampling, color processing and compression. We present experiments performed with our framework in indoor scenes of different natures captured with a consumer depth sensor.
References:
Felix Endres, Jurgen Hess, Jurgen Sturm, Daniel Cremers, and Wolfram Burgard. 2014. 3-D mapping with an RGB-D camera. IEEE Transactions on Robotics 30, 1 (2014), 177–187. Google ScholarDigital Library
Shahram Izadi, David Kim, Otmar Hilliges, David Molyneaux, Richard Newcombe, Pushmeet Kohli, Jamie Shotton, Steve Hodges, Dustin Freeman, Andrew Davison, and Andrew Fitzgibbon. 2011. KinectFusion: Real-time 3D Reconstruction and Interaction Using a Moving Depth Camera. In Proc. ACM Symp. on User Interface Software and Technology. 559–568. Google ScholarDigital Library
Ruwen Schnabel, Patrick Degener, and Reinhard Klein. 2009. Completion and reconstruction with primitive shapes. Computer Graphics Forum 28, 2 (2009), 503–512. Google ScholarCross Ref
Ruwen Schnabel, Roland Wahl, and Reinhard Klein. 2007. Efficient RANSAC for Point-Cloud Shape Detection. Computer Graphics Forum 26, 2 (June 200