
“Predictive Point-Cloud Compression” by Gumhold, Kami, Isenburg and Seidel
Conference:
Type(s):
Talk Type(s):
Title:
- Predictive Point-Cloud Compression
Session/Category Title:
- Mesh Thingies
Presenter(s)/Author(s):
Moderator(s):
Abstract:
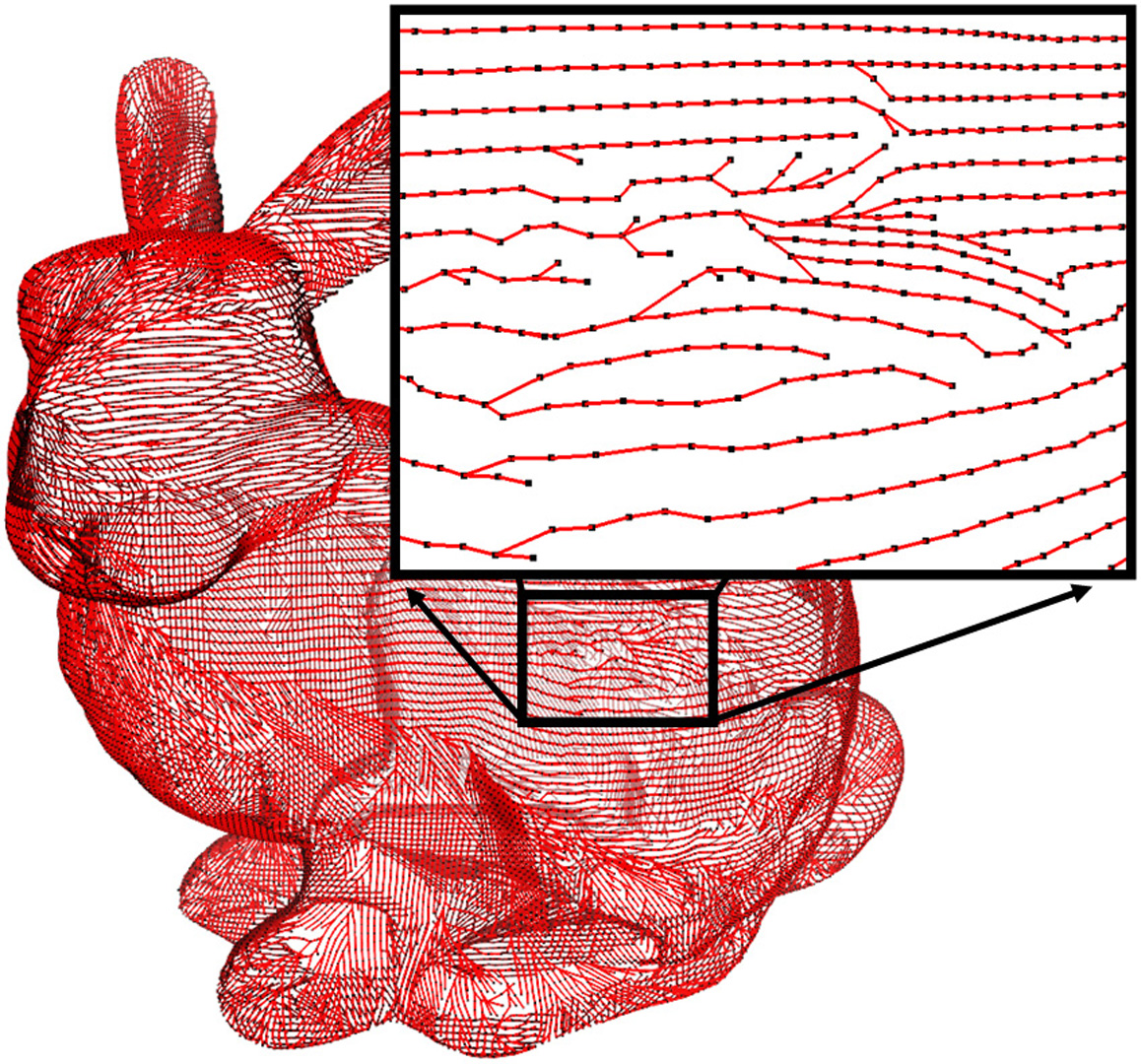
Point clouds have recently become a popular alternative to polygonal meshes for representing three-dimensional geometric models. 3D photography and scanning systems acquire the geometry and appearance of real-world objects in form of point samples. Rendering directly with points eliminates the complex task of reconstructing a surface and allows handling of non-surfaces like models such as trees. With modern acquisition techniques producing larger and larger amounts of points, efficient schemes for compressing such data have become necessary.
References:
Devillers, O., and Gandoin, P.-M. 2000. Geometric compression for interactive transmission. In Visualization 2000, 319–326.
Kronrod, B., and Gotsman, C. 2002. Optimized compression of triangle mesh geometry using prediction trees. In Proceedings of 3DPVT-02, 602–608.
Peng, J., and Kuo, C. C. J. 2003. Octree-based progressive geometry encoder. In Proceedings of the SPIE, 301–311.
Waschbüsch, M., Gross, M., Eberhard, F., Lamboray, E., and Würmlin, S. 2004. Progressive compression of point-sampled models. In Eurographics Symposium on Point Based Graphics, 95–102.