
“Getting graphics in gear: graphics and dynamics in driving simulation” by Deyo, Briggs and Doenges
Conference:
Type:
Title:
- Getting graphics in gear: graphics and dynamics in driving simulation
Presenter(s)/Author(s):
Abstract:
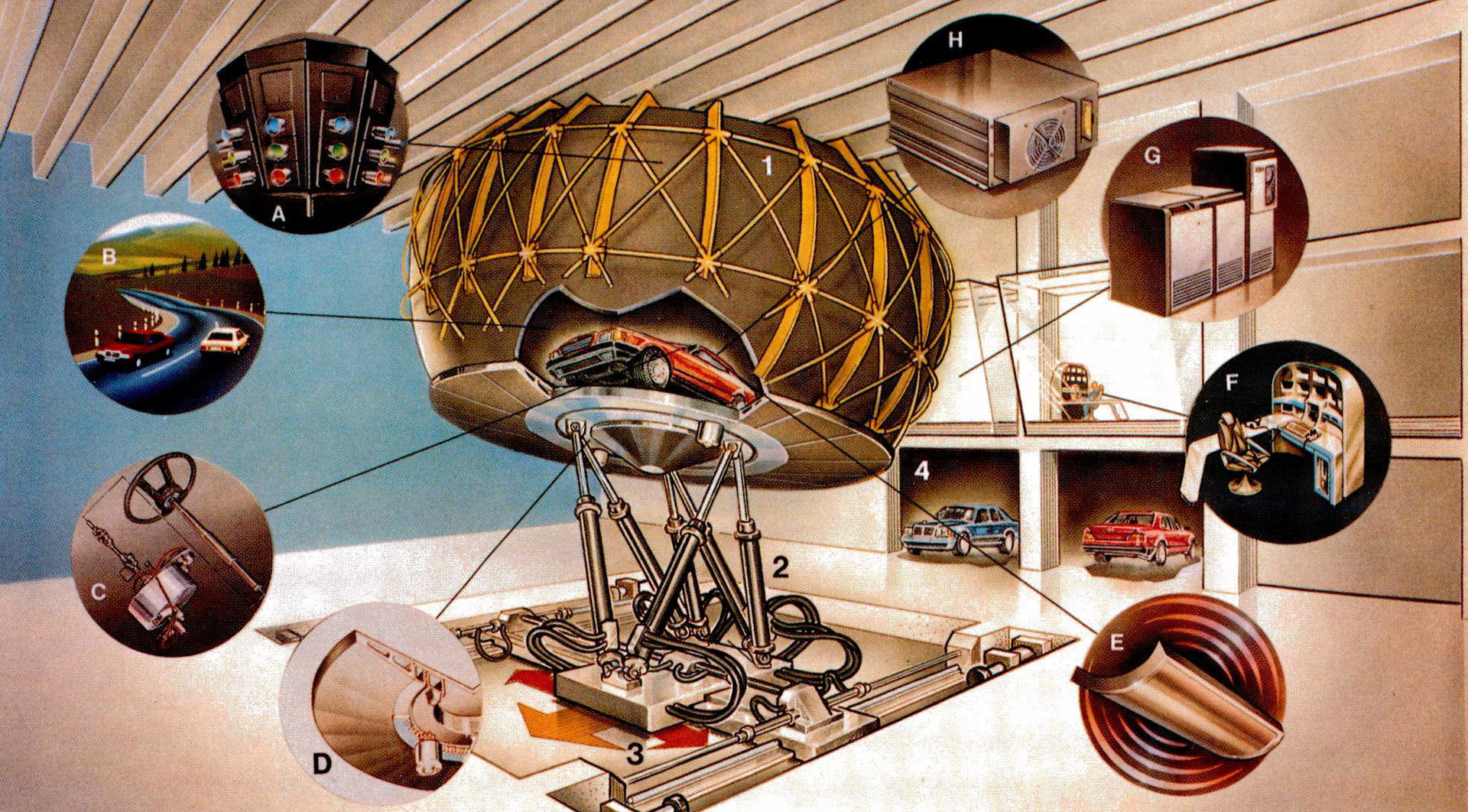
Man-in-the-loop simulation uses a person in the control loop to provide feedback to the system operations. Proper operator cueing must be provided to ensure a realistic response. Real-time computer graphics and dynamics both play dominant roles in providing these necessary cues. Dynamics simulation of modern vehicles requires a multi-body non-linear approach for acceptable fidelity of motion. A vehicle can be modeled as a set of linked rigid bodies, whose connections are described by a graph. Real-time constraints on the computation of non-linear dynamics equations require the development of naturally parallel recursive algorithms, whose organization closely follows the system graph. Significant speed-up can be accomplished using these parallel algorithms.
References:
1. Armstrong, W. Recursive Solution to the Equations of Motion of An N-Link Manipulator. In Proc. 5th World Congress on Theory of Machines and Mechanism, Vol. 2, (Montreal, 1979), 1343-1346.
2. Bae, D. and ttaug, E. A Recursive Formulation for Constrainted Mechanical System Dynamics. Technical Report 86-14, Center for Computer Aided Design, College of Engineering, University of Iowa, 1986.
3. Baumgarte, J. Stabilization of Constraints and Integrals of Motion in Dynamic Systems. Computer Methotis in Applied Mechanics in Engineering, 1 (1972), 1- 16.
4. Casali, J. and Wierwille, W. The Effects of Various Design Alternatives on Moving-Base Driving Simulator Discomfort. Human Factors, 22, 6 (1980), 741-756.
5. Chace, M. Methods and Experience in Computer Aided Design of Large-Displacement Mechanical Systems. In Computer Aided Analysis and Optimization of Mechanical System Dynamics, E. Haug. (ed.). Springer-Verlag, Heidelberg, 1984.
6. Dennis, J. and More, J. Quasi-Newton Methods, Motivation and Theory. SIAM Review 19, 1 (1977), 46-89. September 1967, pp. 250-253.
7. Dickmanns, E.D., and Zapp, A. Guiding Land Vehicles Along Roadways by Computer Vision. Presented at AFCET Conference “Automatique 85 – the tools for tomorrow”, Toulouse, October 1985.
8. Doenges, Peter K. Overview of Computer Image Generation in Visual Simulation, Presented at ACM Siggraph Technical Courses, July, 1985.
9. Duncan, J.R., and Wegscheid, E.L. Off-Road Vehicle Simulation for Human Factors Research. Paper 82- 1610, 1982 Winter Meeting, American Society of Agricultural Engineers (Chicago, Dec. 14-17, 1982.)
10. Drosdol, J. and Panik, F. The Daimler-Benz Driving Simulator: a Tool for Vehicle Development. SAE Technical Paper Series, 850334, (Feb. 1985).
11. Gear, W. Differential-Algebraic Equations. In Computer Aided Analysis and Optimization of Mechanical System Dynamics, E. Haug (ed.) Springer-Verlag, Heidelberg, 1984.
12. Goldstein, H. Classical Mechanics. Addison- Wesley, Reading, Mass., 1980.
13. Hahn, S., and Kalb, E. The Daimler-Benz Driving Simulator Set-Up and Results of First Experiments. In Summer Computer Simulation Conference Proceedings Simulation Councils, Inc., San Diego, 1987, pp. 993 – 998.
14. Haug, E. (ed.) Computer Aided Analysis and Optimization of Mechanical System Dynamics. Springer- Verlag, Heidelberg, 1984.
15. Haug, E. Elements and Methods of Computational Dynamics. In Computer Aided Analysis and Optimization of Mechanical System Dynamics, E. Haug (ed.).
16. Hooker, W. and Margulies, G. The Dynamical Attitude Equations for an n – Body Satellite. J. Astronaut. Sci. 12 (1965), 123-128.
17. Issacs, P. and Cohen, M. Controlling Dynamic Simulation with Kinematic Constraints, Behavior Functions and Inverse Dynamics. Computer Graphics 21, 4 (July 1987), 215-224.
18. Kempf, D., Bonderson, L., and Slater, L. Real Time Simulation for Application to ABS Development. SAE Technical Paper 870336, 1987.
19. Lambert, J. Computational Methods in Ordinary Differential Equations. John Wiley, New York, 1973.
20. Luh, J., Walker, M., and Paul, R. On-line Computational Scheme for Mechanical Manipulator. J. Dyn. Syst. Measurement Control 102 (1980), 69-76.
21. Nordmark, S. VTI Driving Simulator – Mathematical Model of a Four-wheeled Vehicle for Simulation in Real-Time. VTI Rapport Nr 267A 1984. Statens vagoch trafikinstitut, Link~ping, Sweden, 1984.
22. Orlandea, N., Chute, M., and Calahan, D. A Sparsity- Oriented Approach to the Dynamic Analysis and Design of Mechanical Systems- Parts 1 and 2. J. of Engineering for Industry (1977), 773-784.
23. Richter, Bernd. Driving Simulator Studies – the Influence of Vehicle Parameters on Safety in Critical Situations. SAE Technical Paper Series, 741105, (Feb. 1974).
24. Sheridan, T.B., Paynter, H.M., and Coons, S.A. Some Novel Display Techniques for Driving Simulation. In IEEE Transactions on Human Factors in Electronics, Vol. HFE-5, September 1964, pp. 29-32.
25. Wehage, R. and Haug, E. Generalized Coordinate Partitioning for Dimension Reduction in Analysis of Constrained Mechanical Systems. J. of Mechanical Design, 104 (1982), 247-255.
26. Weirwille, W. W., Gagne, G.A., and Knight, J. R. A Laboratory Display System Suitable for Man-Machine Interface. In EEE Transactions on Human Factors in Electronics, Vol. HFE-8, No. 3.
27. Wittenburg, J. Dynamics of Systems of Rigid Bodies. B. G. Teubner, Stuttgart, 1977.