
“Frame-to-frame coherence and the hidden surface computation: Constraints for a convex world” by Hubschman and Zucker
Conference:
Type(s):
Title:
- Frame-to-frame coherence and the hidden surface computation: Constraints for a convex world
Presenter(s)/Author(s):
Abstract:
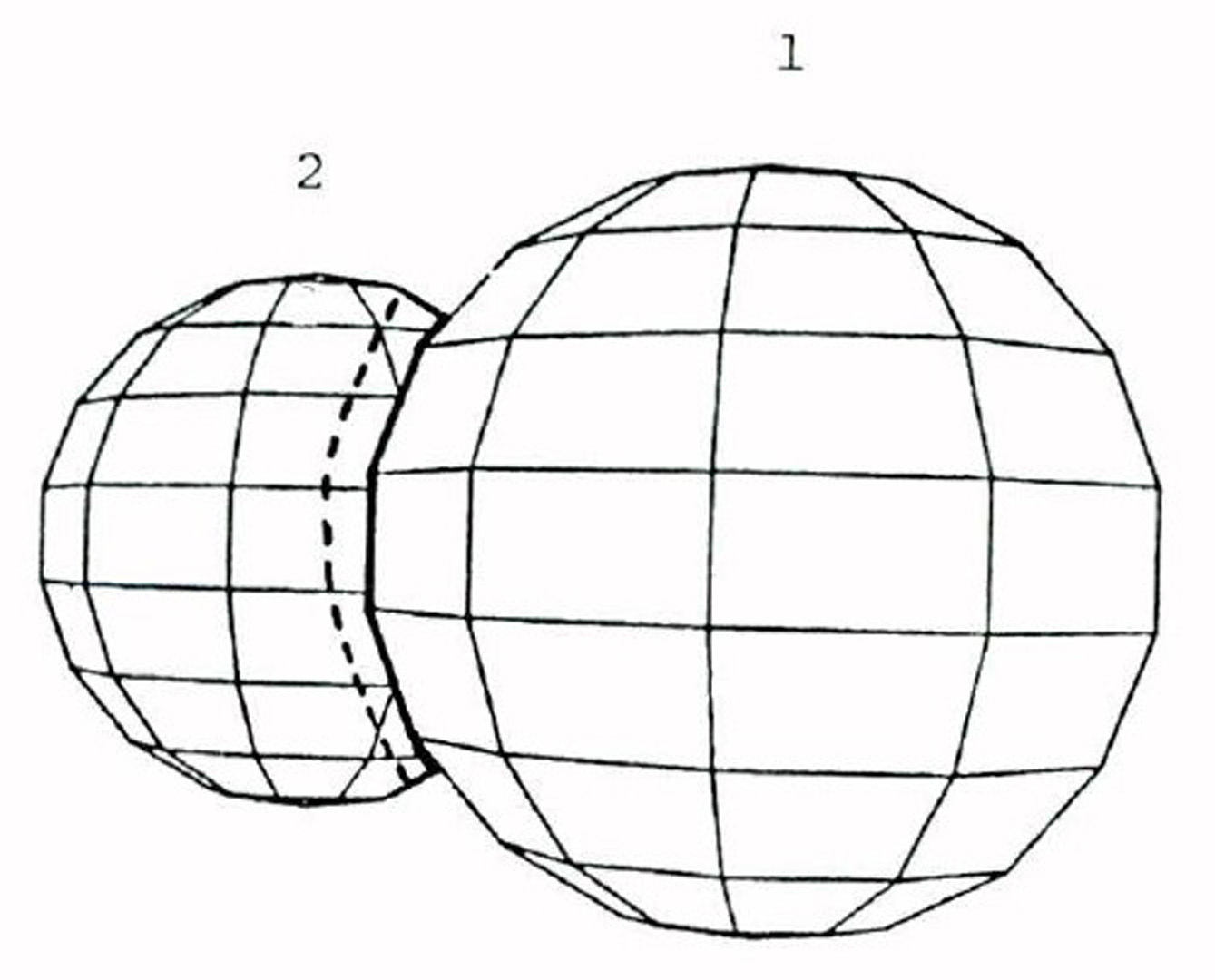
Frame-to-frame coherence is the highly structured relationship that exists between successive frames of certain animation sequences. From the point of view of the hidden surface computation, this implies that parts of the scene will become visible or invisible in a predictable fashion. In this paper the frame-to-frame coherence constraints are identified and characterized for static scenes restricted to stationary, closed, convex, nonintersecting polyhedra. The animation derives from a continuous movement of the viewer. The mathematical analysis of the constraints is geometric, and leads to a characterization of the self-occlusion relationship over a single polyhedron; and to a characterization of the occlusion or change of occlusion relationship over two polyhedra. Based on these constraints, an algorithm is presented which generates successive frames in an animation sequence.
References:
1. Clark, J.H., “Hierarchical Geometric Models for Visible Surface Algorithms” CACM Vol. 19, No. 10, (October 1975), p. 547.
2. Fuchs, H., Kedem, Z., Naylor, B., “On Visible Surface Generation by A Priori Tree Structures”, Computer Graphics, Vol. 14, No. 3, (July 1980), p. 124.
3. Jones, C.B., “A New Approach to the Hidden Line Problem” Computer Journal, Vol. 14, No. 3; (August 1971), p 232.
4. Rubin, S., and Whitted, T., “A Three-Dimensional Representation for Fast Rendering of Complex Scenes” Computer Graphics, Vol. 14, No. 3, (July 1980), p. 110.
5. Shamos, M., “Computational Geometry”, Ph.D. thesis, Computer Science, Yale University, (1978).
6. Sutherland, I.E., Sproull, R.F., and Shumacker, R.A., “A Characterization of Ten Hidden Surface Algorithms”, Computing Surveys, Vol. 6, (1974), p. 1.