
“Data-driven biped control” by Lee, Kim and Lee
Conference:
Type(s):
Title:
- Data-driven biped control
Presenter(s)/Author(s):
Abstract:
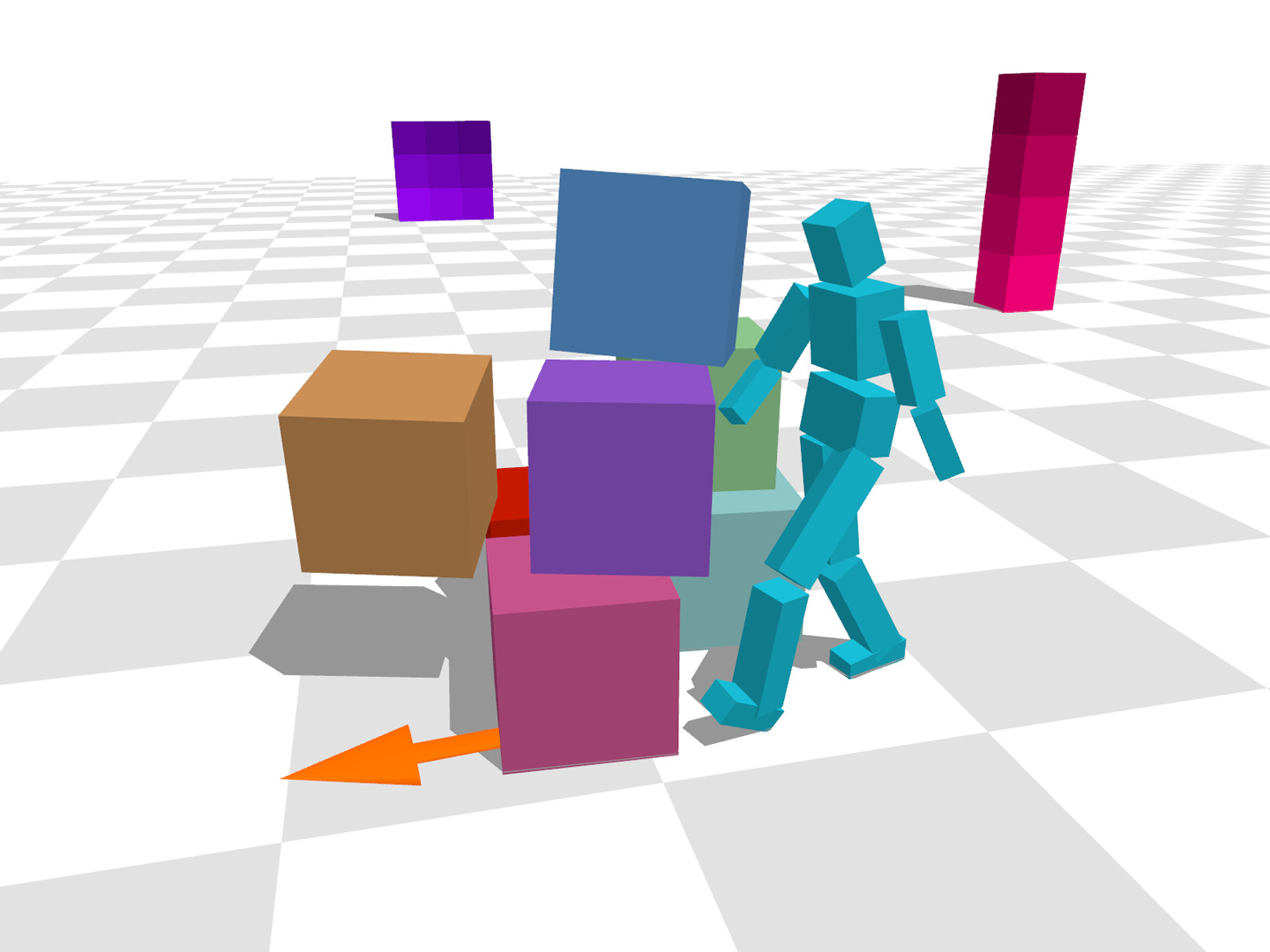
We present a dynamic controller to physically simulate under-actuated three-dimensional full-body biped locomotion. Our data-driven controller takes motion capture reference data to reproduce realistic human locomotion through realtime physically based simulation. The key idea is modulating the reference trajectory continuously and seamlessly such that even a simple dynamic tracking controller can follow the reference trajectory while maintaining its balance. In our framework, biped control can be facilitated by a large array of existing data-driven animation techniques because our controller can take a stream of reference data generated on-the-fly at runtime. We demonstrate the effectiveness of our approach through examples that allow bipeds to turn, spin, and walk while steering its direction interactively.
References:
1. Coros, S., Beaudoin, P., Yin, K. K., and van de Panne, M. 2008. Synthesis of constrained walking skills. ACM Transactions on Graphics (SIGGRAPH Asia) 27, 6. Google ScholarDigital Library
2. Coros, S., Beaudoin, P., and van de Panne, M. 2009. Robust task-based control policies for physics-based characters. ACM Transactions on Graphics (SIGGRAPH Asia) 28, 6. Google ScholarDigital Library
3. da Silva, M., Abe, Y., and Popović, J. 2008. Interactive simulation of stylized human locomotion. ACM Transactions on Graphics (SIGGRAPH 2008) 27, 3. Google ScholarDigital Library
4. da Silva, M., Abe, Y., and Popović, J. 2008. Simulation of human motion data using short-horizon model-predictive control. Computer Graphics Forum (Eurographics 2008) 27, 2.Google Scholar
5. da Silva, M., Durand, F., and Popović, J. 2009. Linear bellman combination for control of character animation. ACM Transactions on Graphics (SIGGRAPH 2009) 28, 3. Google ScholarDigital Library
6. Faloutsos, P., van de Panne, M., and Terzopoulos, D. 2001. Composable controllers for physics-based character animation. In Proceedings of SIGGRAPH 2001, 251–260. Google ScholarDigital Library
7. Fang, A. C., and Pollard, N. S. 2003. Efficient synthesis of physically valid human motion. ACM Transactions on Graphics (SIGGRAPH 2003) 22, 3, 417–426. Google ScholarDigital Library
8. Gleicher, M. 1998. Retargeting motion to new characters. In Proceedings of SIGGRAPH 98, 33–42. Google ScholarDigital Library
9. Hodgins, J. K., and Pollard, N. S. 1997. Adapting simulated behaviors for new characters. In Proceedings of SIGGRAPH 1997, 153–162. Google ScholarDigital Library
10. Hodgins, J. K., Wooten, W. L., Brogan, D. C., and O’Brien, J. F. 1995. Animating human athletics. In Proceedings of SIGGRAPH 95, 71–78. Google ScholarDigital Library
11. Kim, J.-Y., Park, I.-W., and Oh, J.-H. 2007. Walking control algorithm of biped humanoid robot on uneven and inclined floor. J. Intelligent and Robotic Systems 48, 4, 457–484. Google ScholarDigital Library
12. Kim, M., Hyun, K. L., Kim, J., and Lee, J. 2009. Synchronized multi-character motion editing. ACM Transactions on Graphics (SIGGRAPH 2009) 28, 3. Google ScholarDigital Library
13. Kim, J., 2009. Virtual Physics: The realtime dynamics simulation library, http://virtualphysics.imrc.kist.re.kr/.Google Scholar
14. Kovar, L., Gleicher, M., and Pighin, F. 2002. Motion graphs. ACM Transactions on Graphics (SIGGRAPH 2002) 21, 3, 473–482. Google ScholarDigital Library
15. Lee, J., and Shin, S. Y. 1999. A hierarchical approach to interactive motion editing for human-like figures. In Proceedings of SIGGRAPH 99, 39–48. Google ScholarDigital Library
16. Lee, J., Chai, J., Reitsma, P. S. A., Hodgins, J. K., and Pollard, N. S. 2002. Interactive control of avatars animated with human motion data. ACM Transactions on Graphics (SIGGRAPH 2002) 21, 3, 491–500. Google ScholarDigital Library
17. Lee, J. 2008. Representing rotations and orientations in geometric computing. IEEE Computer Graphics and Applications 28, 2, 75–83. Google ScholarDigital Library
18. Liu, C. K., and Popović, Z. 2002. Synthesis of complex dynamic character motion from simple animations. vol. 21, 408–416. Google ScholarDigital Library
19. Macchietto, A., Zordan, V., and Shelton, C. R. 2009. Momentum control for balance. ACM Transactions on Graphics (SIGGRAPH 2009) 28, 3. Google ScholarDigital Library
20. Morimoto, J., Zeglin, G., and Atkeson, C. 2003. Minimax differential dynamic programming: Application to a biped walking robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems.Google Scholar
21. Muico, U., Lee, Y., Popović, J., and Popović, Z. 2009. Contact-aware nonlinear control of dynamic characters. ACM Transactions on Graphics (SIGGRAPH 2009) 28, 3. Google ScholarDigital Library
22. Nakanishi, J., Morimoto, J., Endo, G., Cheng, G., Schaal, S., and Kawato, M. 2004. Learning from demonstration and adaptation of biped locomotion. Robotics and Autonomous Systems 47, 2–3 (June), 79–91.Google ScholarCross Ref
23. Nakanishi, M., Nomura, T., and Sato, S. 2006. Stumbling with optimal phase reset during gait can prevent a humanoid from falling. Biol. Cybern. 95, 5, 503–515. Google ScholarDigital Library
24. Nakaoka, S., Nakazawa, A., and Yokoi, K. 2003. Generating whole body motions for a biped humanoid robot from captured human dances. In Proceedings of the IEEE International Conference on Robotics and Automation, 3905–3910.Google Scholar
25. Rose, C., Cohen, M. F., and Bodenheimer, B. 1998. Verbs and adverbs: Multidimensional motion interpolation. IEEE Computer Graphics & Applications 18, 5 (September – October), 32–40. Google ScholarDigital Library
26. Safonova, A., Hodgins, J. K., and Pollard, N. S. 2004. Synthesizing physically realistic human motion in low-dimensional, behavior-specific spaces. ACM Transactions on Graphics (SIGGRAPH 2004) 23, 3, 514–521. Google ScholarDigital Library
27. Sok, K. W., Kim, M., and Lee, J. 2007. Simulating biped behaviors from human motion data. ACM Transactions on Graphics (SIGGRAPH 2007) 26, 3. Google ScholarDigital Library
28. Tedrake, R., Zhang, T. W., and Seung, H. S. 2004. Stochastic policy gradient reinforcement learning on a simple 3d biped. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), 2849–2854.Google Scholar
29. Tsai, Y., Lin, W., Cheng, K. B., Lee, J., and Lee, T. 2009. Real-Time Physics-Based 3D biped character animation using an inverted pendulum model. IEEE Transactions on Visualization and Computer Graphics 99, 2. Google ScholarDigital Library
30. Wampler, K., and Popović, Z. 2009. Optimal gait and form from animal locomotion. ACM Transactions on Graphics (SIGGRAPH 2009) 28, 3. Google ScholarDigital Library
31. Wang, J. M., Fleet, D. J., and Hertzmann, A. 2009. Optimizing walking controllers. ACM Transactions on Graphics (SIGGRAPH Asia 2009) 28, 6. Google ScholarDigital Library
32. Yin, K., Loken, K., and van de Panne, M. 2007. Simbicon: Simple biped locomotion control. ACM Transactions on Graphics (SIGGRAPH 2007) 26, 3. Google ScholarDigital Library
33. Yin, K., Coros, S., Beaudoin, P., and van de Panne, M. 2008. Continuation methods for adapting simulated skills. ACM Transactions on Graphics (SIGGRAPH 2008) 27, 3. Google ScholarDigital Library
34. Zordan, V. B., and Hodgins, J. K. 2002. Motion capture-driven simulations that hit and react. In Proceedings of ACM SIGGRAPH Symposium on Computer Animation, 89–96. Google ScholarDigital Library