
“Stretchable Transducers for Kinesthetic Interactions in Virtual Reality” by Shepherd, Peele, Murray, Barreiros, Shapira, et al. …

Conference:
- SIGGRAPH 2017
-
More from SIGGRAPH 2017:


Type(s):
Entry Number: 21
Title:
- Stretchable Transducers for Kinesthetic Interactions in Virtual Reality
Presenter(s):
Description:
Commercial virtual reality devices such as the Oculus Rift and HTC Vive enable experience designers to emulate a number of human sensory inputs with computer simulations. Commercial experiences have demonstrated plausibly realistic audiovisual sensory input, but somatosensory feedback has been more limited in scope. Most successful attempts in providing feedback to the human Kinesthetic system were considered power-demanding, expensive and potentially harmful to users, therefore somatosensory input has largely been addressed by vibration-based devices, like Linear Resonant Actuators and Eccentric Rotating Mass actuators, aimed at stimulating receptors near the surface of the skin. This method is widely accepted as a proxy in lieu of resisting to muscle tension, but it is not considered a path to realistic input.
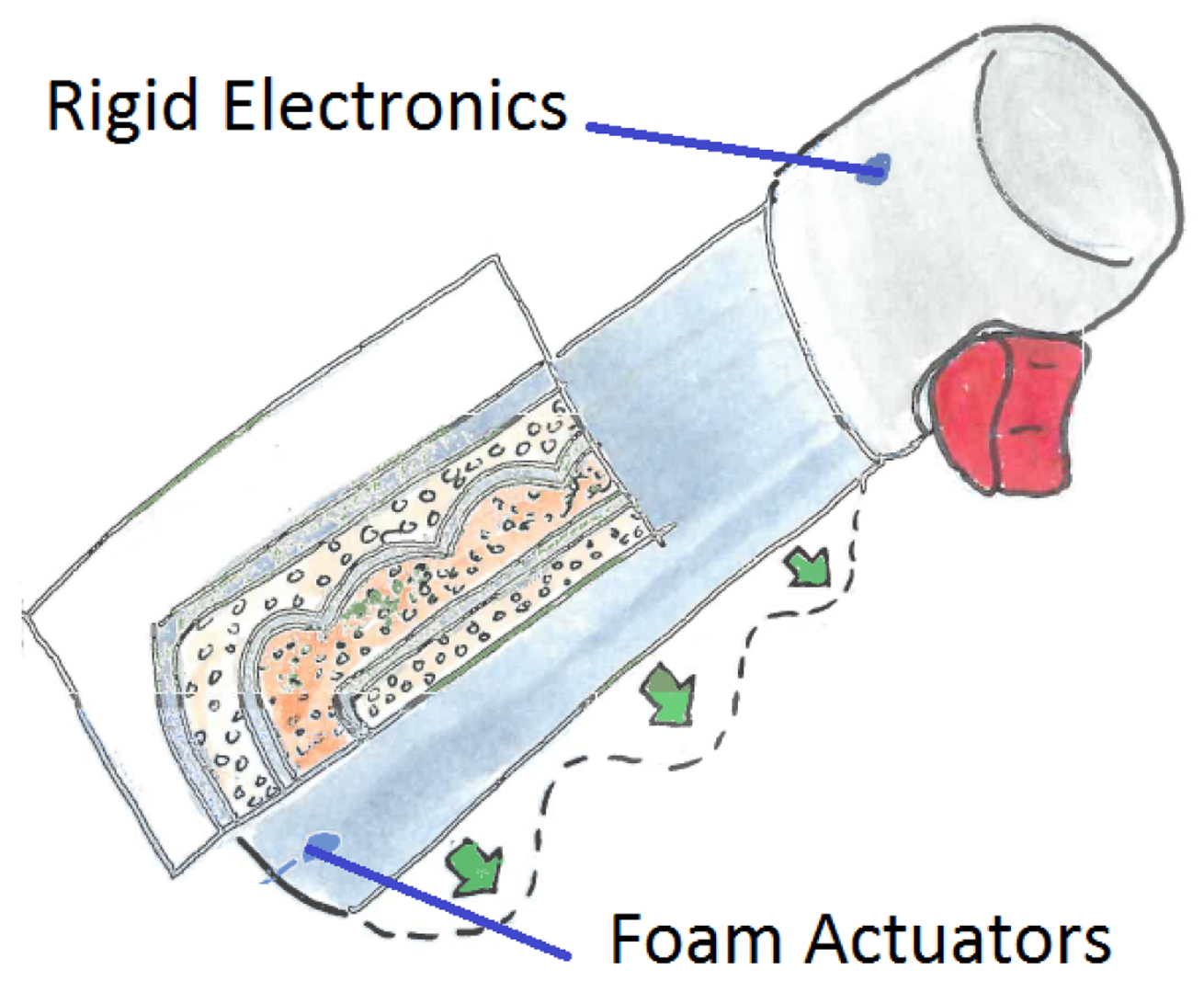
Stemming from advances in materials science, the field of soft robotics constructs stretchable actuators, sensors and displays [Li et al. 2016; Mac Murray et al. 2015; Zhao et al. 2016] using structures and materials that can be deformed at forces exerted by human muscles. To date, most demonstrations of soft robotics have focused on mobile robots, compliant grippers, and biomedical applications. Here we present the use of these technologies for kinesthetic feedback in virtual reality. The materials used to build these devices (e.g silicon) have mechanical properties similar to that of human tissue and are well-suited for applications that require direct and prolonged contact with human skin. Additionally, these systems are well-suited for commercial applications due to the low material cost and compatibility with scalable manufacturing techniques.
We provide two key demonstrations to highlight the use of fluidic elastomer actuators to provide haptic feedback. These demos allow users to progress through a series of brief experiences where the hand-held controller adjusts its form and behavior to match that of the virtual object used in each demo. The objects held in the demo include a goo gun, pistol and mallet.
References:
Shuo Li, Bryan N Peele, Chris M Larson, Huichan Zhao, and Robert F Shepherd. 2016. A Stretchable Multicolor Display and Touch Interface Using Photopatterning and Transfer Printing. Advanced Materials 28, 44 (2016), 9770–9775.
Benjamin C Mac Murray, Xintong An, Sanlin S Robinson, IlseMvan Meerbeek, KevinW O’Brien, Huichan Zhao, and Robert F Shepherd. 2015. Poroelastic foams for simple fabrication of complex soft robots. Advanced Materials 27, 41 (2015), 6334–6340.
NVIDIA. 2016. NVIDIA VR Funhouse. http://store.steampowered.com/app/468700/. (2016). Accessed: 2017-03-20.
Huichan Zhao, Kevin O’Brien, Shuo Li, and Robert F Shepherd. 2016. Optoelectronically innervated soft prosthetic hand via stretchable optical waveguides. Science Robotics (2016).
Keyword(s):
- Human Computer Interaction
- haptics
- virtual reality
Additional Images:
