
“MetaLimbs: Multiple Arms Interaction Metamorphism” by Sasaki, Saraiji, Fernando, Minamizawa and Inami
Conference:
- SIGGRAPH 2017
-
More from SIGGRAPH 2017:


Type(s):
E-Tech Type(s):
Description:
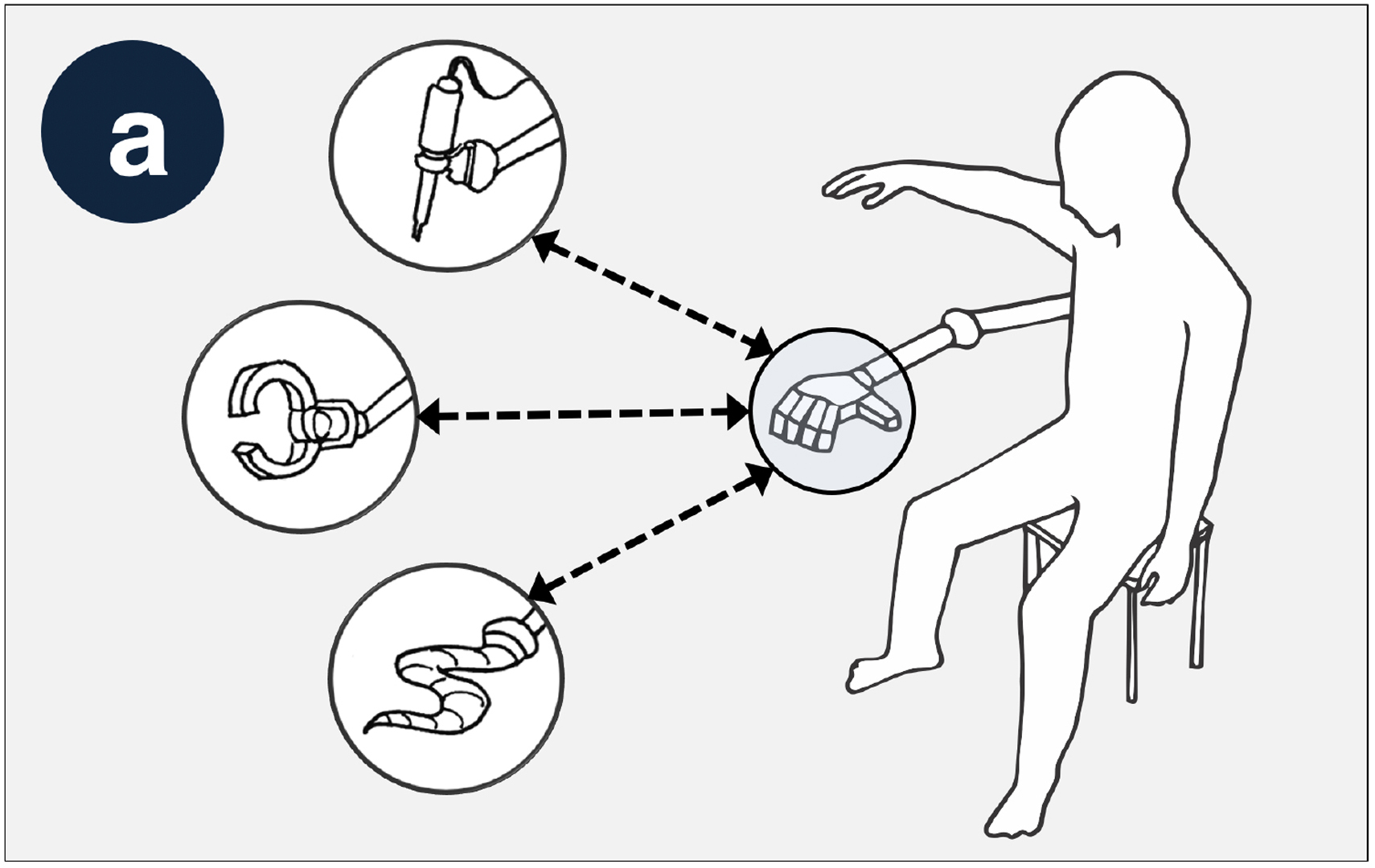
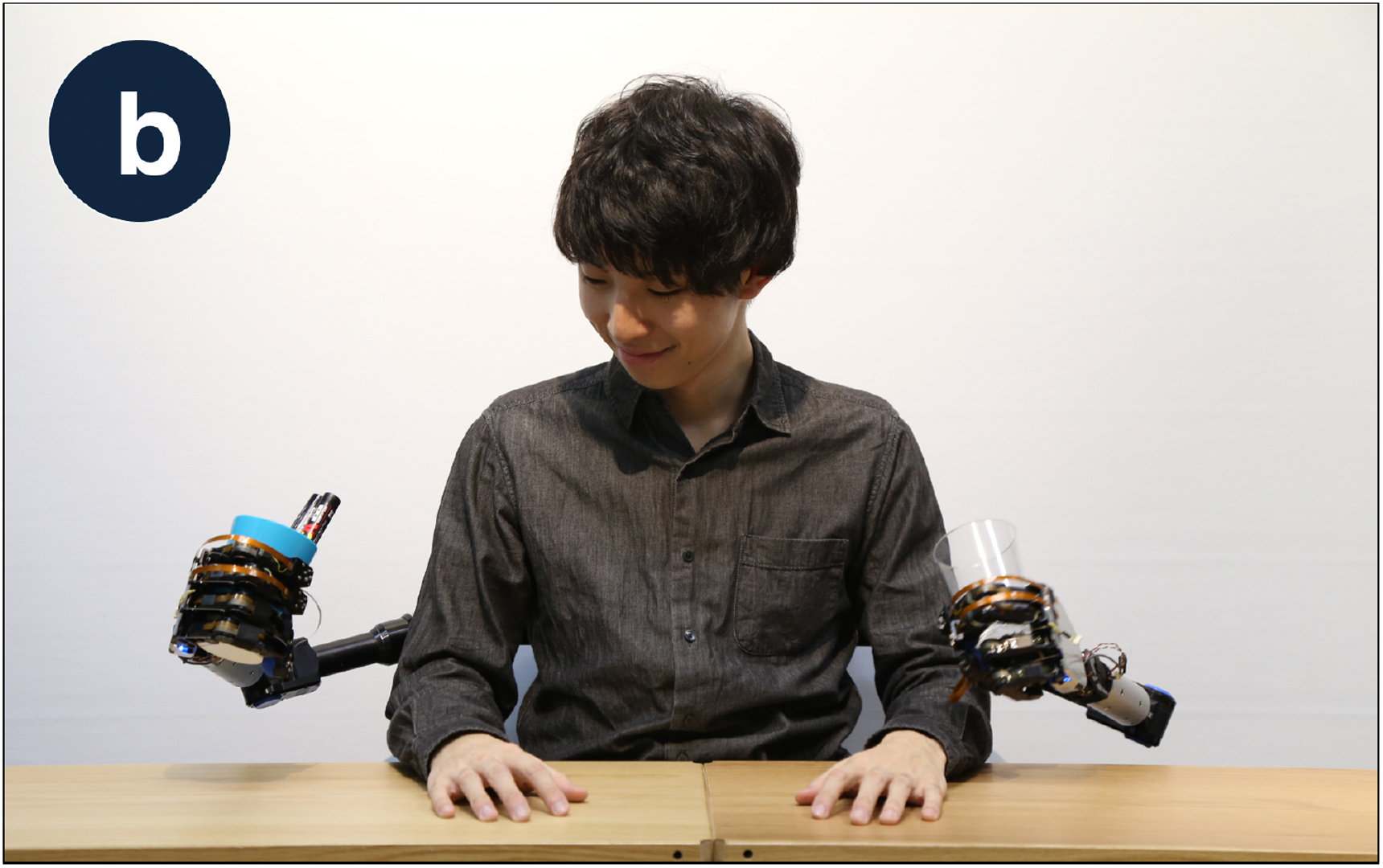
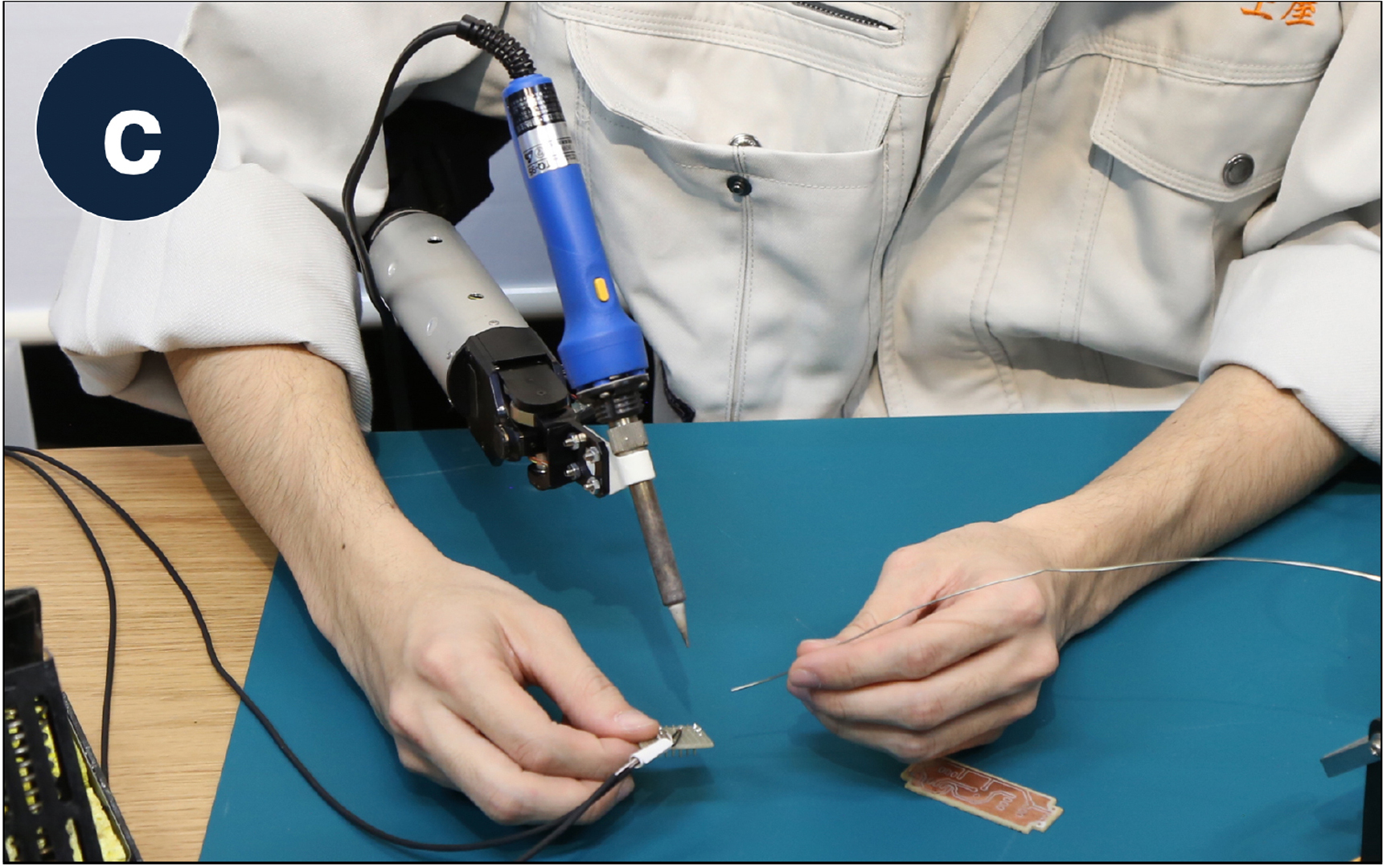
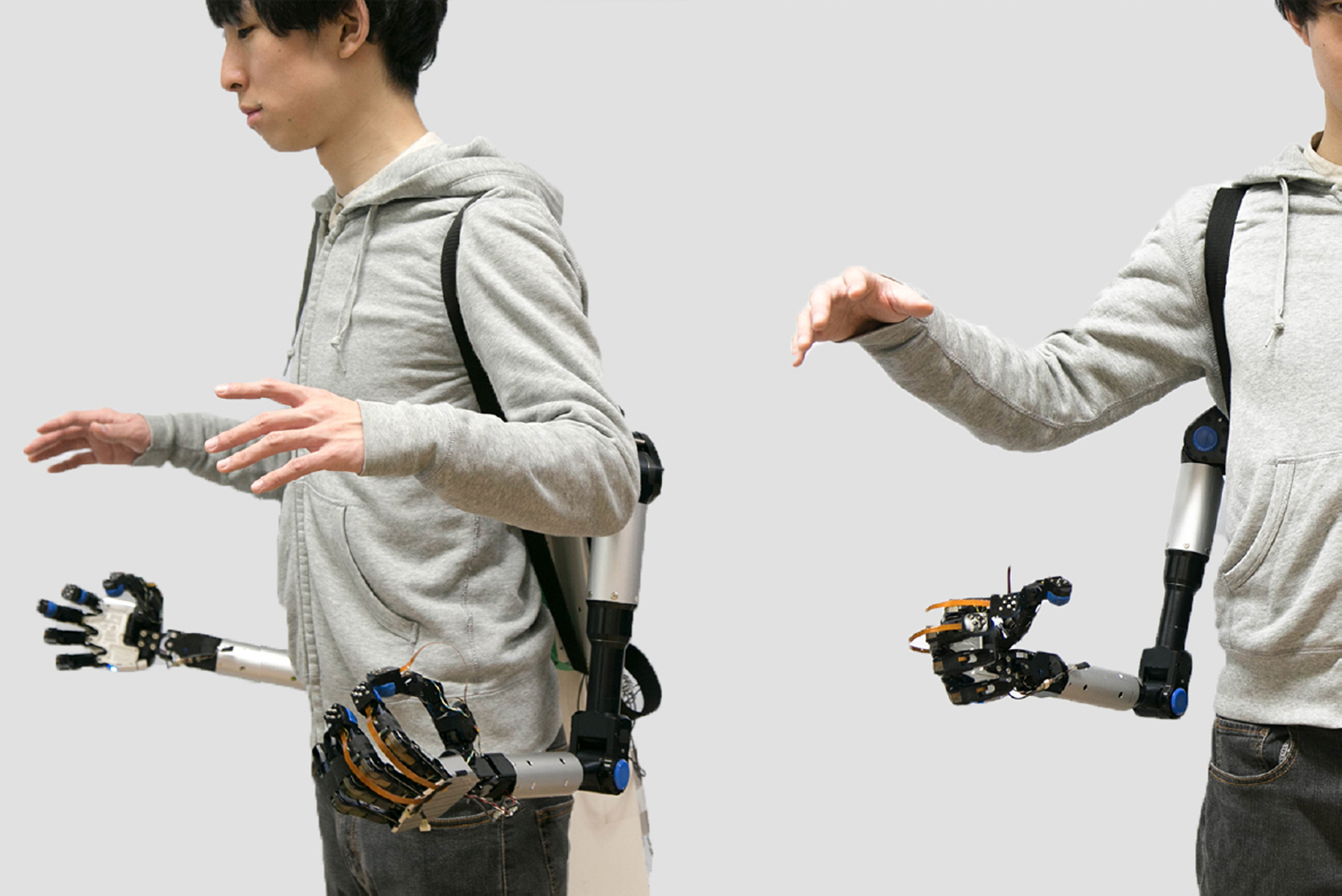
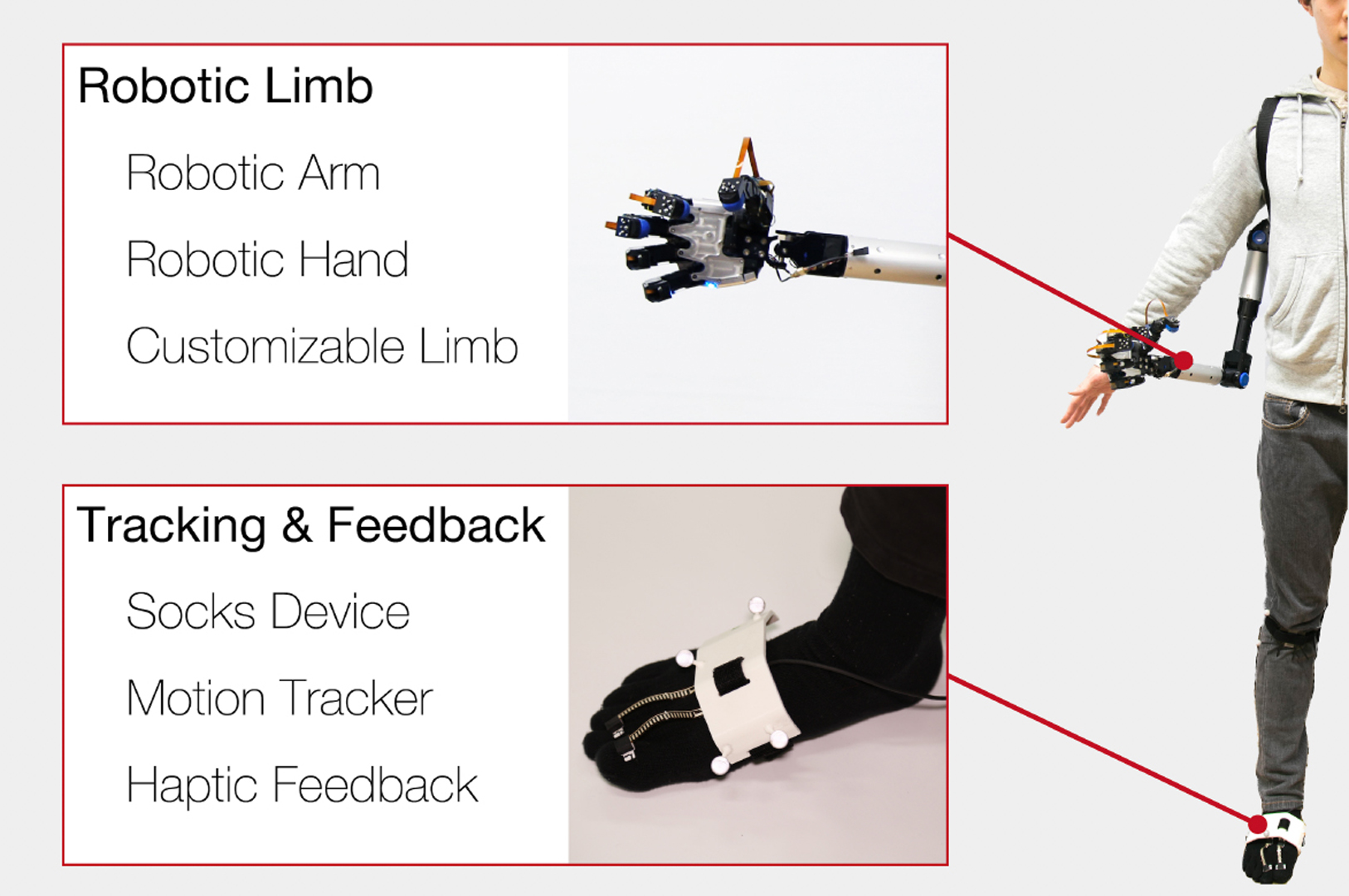
This research proposes a novel interaction to alternate body scheme using artificial limbs substitution metamorphosis. In this work, two additional robotic arms are added to user’s body, and are substituted with the legs. Using this arms/legs substitution, arms count is expanded to four arms in total with voluntary control using legs motion mapping. Limbs control is achieved by tracking the global motion of legs and feet relative to torso, as well as local motion of toes. These data are mapped to the artificial limbs’ arms/hands motion and fingers gripping. Lastly, force feedback is added to the feet and mapped to manipulator’s touch sensors. Using this system, it is possible to perform difficult tasks normal body can not achieve alone, such as holding many objects simultaneously.
Other Information:
Emerging Technologies Best in Show Award Winner
To listen to the audio guide of this contribution in multiple other languages, visit: SIGGRAPH 2017 Emerging Technologies Audio Guides
References:
Eduardo Kac. 1997. Foundation and development of robotic art. Art Journal 56, 3 (1997), 60–67.
Federico Parietti and H Harry Asada. 2014. Supernumerary robotic limbs for aircraft. fuselage assembly: body stabilization and guidance by bracing. In 2014 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 1176–1183.
Domenico Prattichizzo, Monica Malvezzi, Irfan Hussain, and Gionata Salvietti. 2014. The sixth-finger: a modular extra-finger to enhance human hand capabilities. In The 23rd IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN). IEEE, 993–998.
Tomoya Sasaki, MHD Yamen Saraiji, Kouta Minamizawa, Michiteru Kitazaki, and Masahiko Inami. 2016. Changing body ownership using visual metamorphosis. In Proceedings of the 2016 Virtual Reality International Conference. ACM, 33.
Adalberto L Simeone, Eduardo Velloso, Jason Alexander, and Hans Gellersen. 2014. Feet movement in desktop 3D interaction. In 3D User Interfaces (3DUI), 2014 IEEE Symposium on. IEEE, 71–74.
Eduardo Velloso, Dominik Schmidt, Jason Alexander, Hans Gellersen, and Andreas Bulling. 2015. The feet in human–computer interaction: a survey of foot-based interaction. ACM Computing Surveys (CSUR) 48, 2 (2015), 21.
Faye Wu and Harry Asada. 2014. Bio-Artificial Synergies for Grasp Posture Control of Supernumerary Robotic Fingers. In Proceedings of Robotics: Science and Systems. Berkeley, USA.
Keyword(s):
- Body scheme alternation
- Limbs expansion
- mapping & control
Additional Images:
Acknowledgements:
This project is supported by JSPS KAKENHI Grant Number 15H01701.