
“Haptic Video” by Saga, Vlack, Kajimoto and Tachi
Notice: Pod Template PHP code has been deprecated, please use WP Templates instead of embedding PHP. has been deprecated since Pods version 2.3 with no alternative available. in /data/siggraph/websites/history/wp-content/plugins/pods/includes/general.php on line 518
Conference:
- SIGGRAPH 2005
-
More from SIGGRAPH 2005:
Notice: Array to string conversion in /data/siggraph/websites/history/wp-content/plugins/siggraph-archive-plugin/src/next_previous/source.php on line 345

Notice: Array to string conversion in /data/siggraph/websites/history/wp-content/plugins/siggraph-archive-plugin/src/next_previous/source.php on line 345


Type(s):
E-Tech Type(s):
- Haptics
Entry Number: 06
Title:
- Haptic Video
Presenter(s):
Project Affiliation:
- The University of Tokyo
Description:
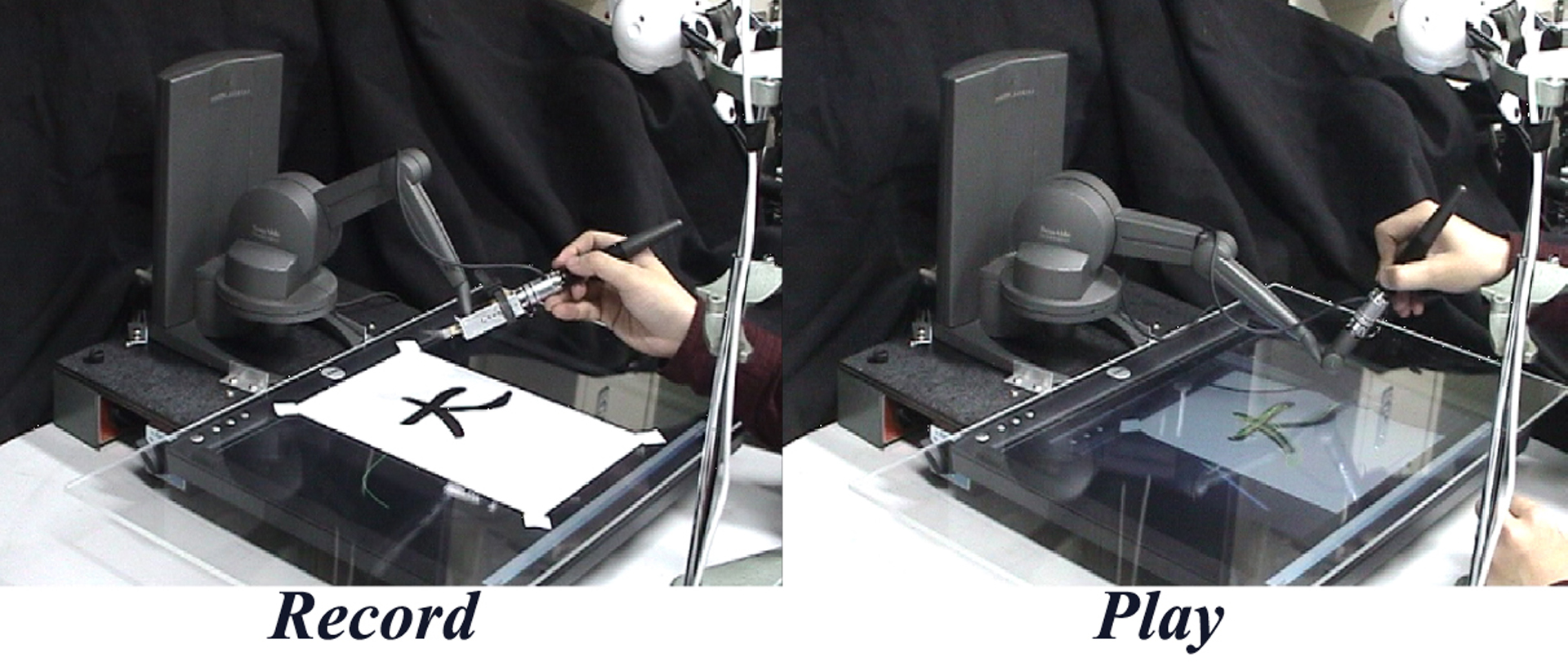
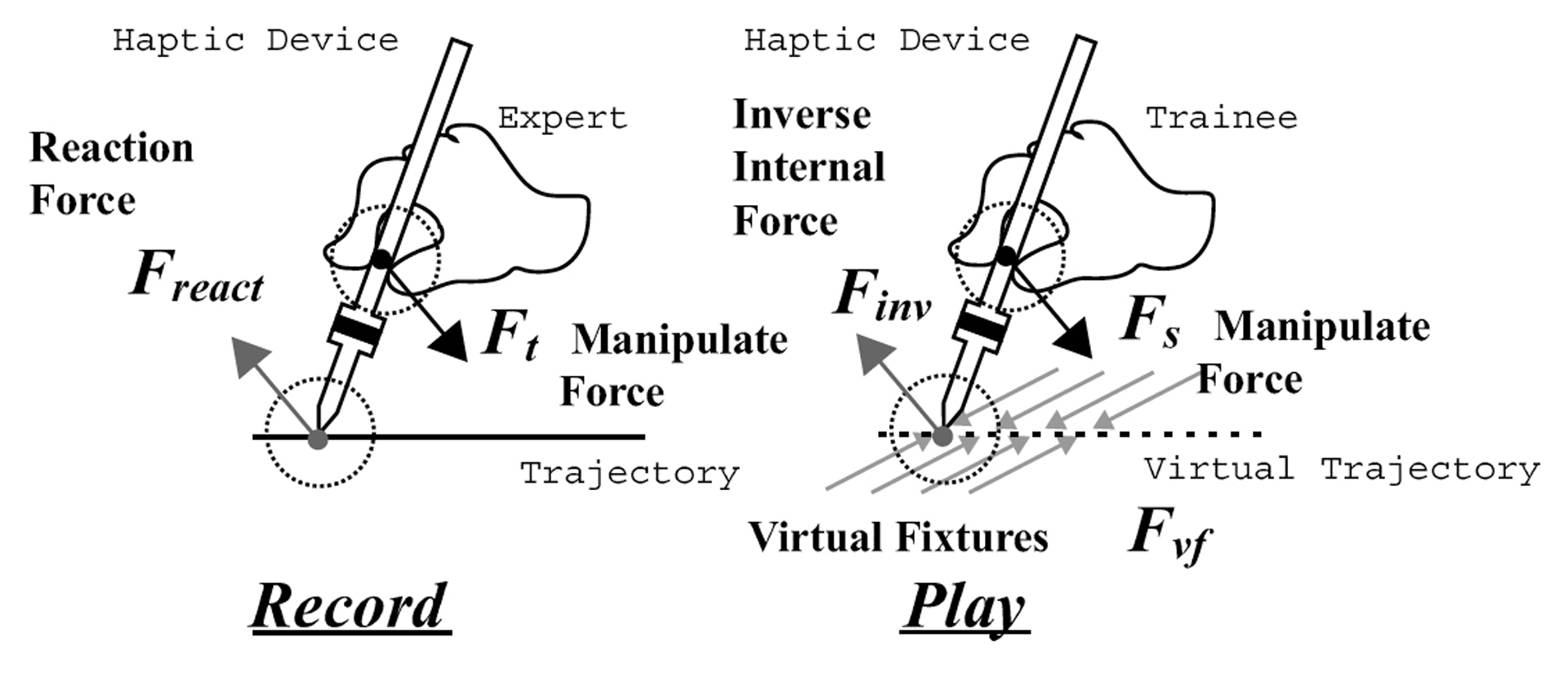
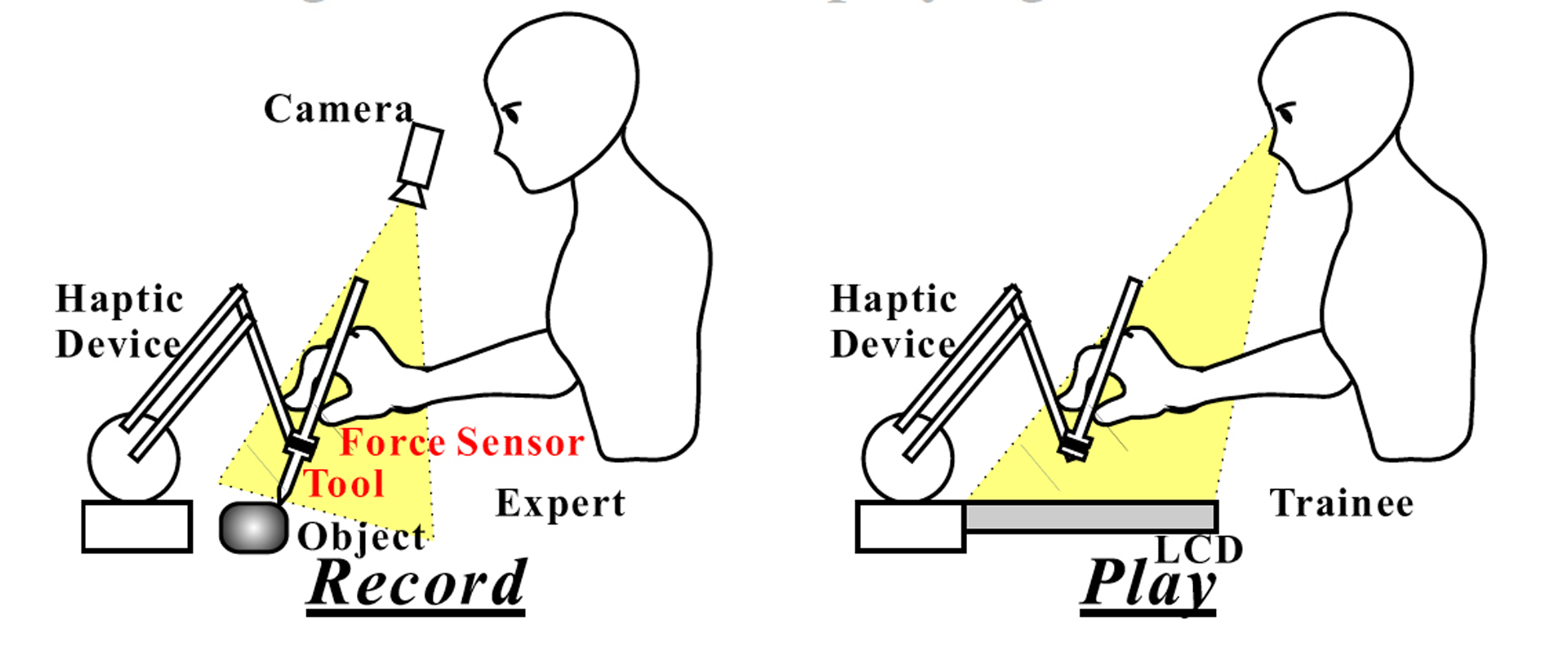
The instruction of professional skills is typically performed with conventional educational materials like video, demonstrating the operations of an expert. There is a multitude of means for knowledge transmission in academic training, but there are relatively few methods to transmit physical skills. Since haptic devices were introduced with the development of VR technology, some instruction systems using force feedback have been proposed. Most systems construct a virtual model of an actual working environment, and present a simulation through computer graphics and a haptic device [Kuroda et al. 2003]. There are also proposed systems that convey skill information to the trainee by recording the movement of the expert, and reproducing it through a haptic device [Yokokohji et al. 1996]. However, instruction is most effective when the haptic sense is proactive. We propose “Haptic Video”, a system that records an expert’s operations and reproduces them dynamically through haptic devices.
Video:
References
GIBSON, J. 1962. Observations on active touch. Psychol. Rev 69, 477–491.
KURODA, Y., NAKAO, M., KURODA, T., OYAMA, H., KOMORI, M., AND MATSUDA, T. 2003. Interaction model between elastic objects for accurate haptic display. In Proc. of 13th International Conference on Artificial Reality and Telexistance, 148–153.
ROSENBERG, L. 1993. Virtual fixtures: Perceptual tools for telerobotic manipulation. In Proc. of IEEE Virtual Reality Int’l. Symposium, 76–82.
YOKOKOHJI, Y., HOLLIS, R., KANADE, T., AND HENMI, K. 1996. Toward machine mediated training of motor skill. In Proc. of the IEEE International Workshop on Robot and Human Communication, 32–37.