
“Distributed Systems of Self-reconfiguring Robots” by Butler, Fitch, Kotay and Rus
Notice: Pod Template PHP code has been deprecated, please use WP Templates instead of embedding PHP. has been deprecated since Pods version 2.3 with no alternative available. in /data/siggraph/websites/history/wp-content/plugins/pods/includes/general.php on line 518
Conference:
- SIGGRAPH 2002
-
More from SIGGRAPH 2002:
Notice: Array to string conversion in /data/siggraph/websites/history/wp-content/plugins/siggraph-archive-plugin/src/next_previous/source.php on line 345

Notice: Array to string conversion in /data/siggraph/websites/history/wp-content/plugins/siggraph-archive-plugin/src/next_previous/source.php on line 345


Type(s):
E-Tech Type(s):
- Robotics
Entry Number: 69
Title:
- Distributed Systems of Self-reconfiguring Robots
Presenter(s):
Description:
1 Introduction
A robot designed for a single purpose can perform a specific task very well, but it may perform poorly on a different task, or in a different environment. This is acceptable if the environment is structured; however, if the task is in an unknown environment, then a robot with the ability to change shape to suit the environment and the required functionality will be more likely to succeed. We wish to create more versatile robots by using self-reconfiguration: hundreds of small modules will autonomously organize and reorganize as geometric structures to best fit the terrain on which the robot has to move, the shape of the object the robot has to manipulate, or the sensing needs for the given task. For example, a robot could synthesize a snake shape to travel through a narrow tunnel, and then morph into a six-legged insect to navigate on rough terrain upon exit.
Self-reconfiguring robots are well-suited for tasks in hazardous and remote environments, especially when the environmental model and the task specifications are uncertain. A collection of simple, modular robots endowed with self-reconfiguration capabilities can conform to the shape of the terrain for locomotion by implementing “water-flow” like locomotion gaits which allow the robots to move by conforming to the shape of the terrain.
To create autonomous robot systems capable of such applications, our research agenda is focused on two directions of work: (1) new designs for modular robots that can support self-assembly and self-reconfiguration and (2) new distributed planners that support parallelism, are efficient, and correctly direct units to change shape.
2 Robots and Capabilities
Several groups have examined how to design robot modules capable of self-reconfiguration [Rus and Chirikjian 2001]. In our own work [Rus et al. 2002] we have developed two unit-modular systems. The main goal for the Molecule Robot has been to achieve self-reconfiguration in three dimensions. The Crystal Robot uses a novel actuation mechanism, scaling, which gives more robust motion that the previous rotation-based actuation systems.
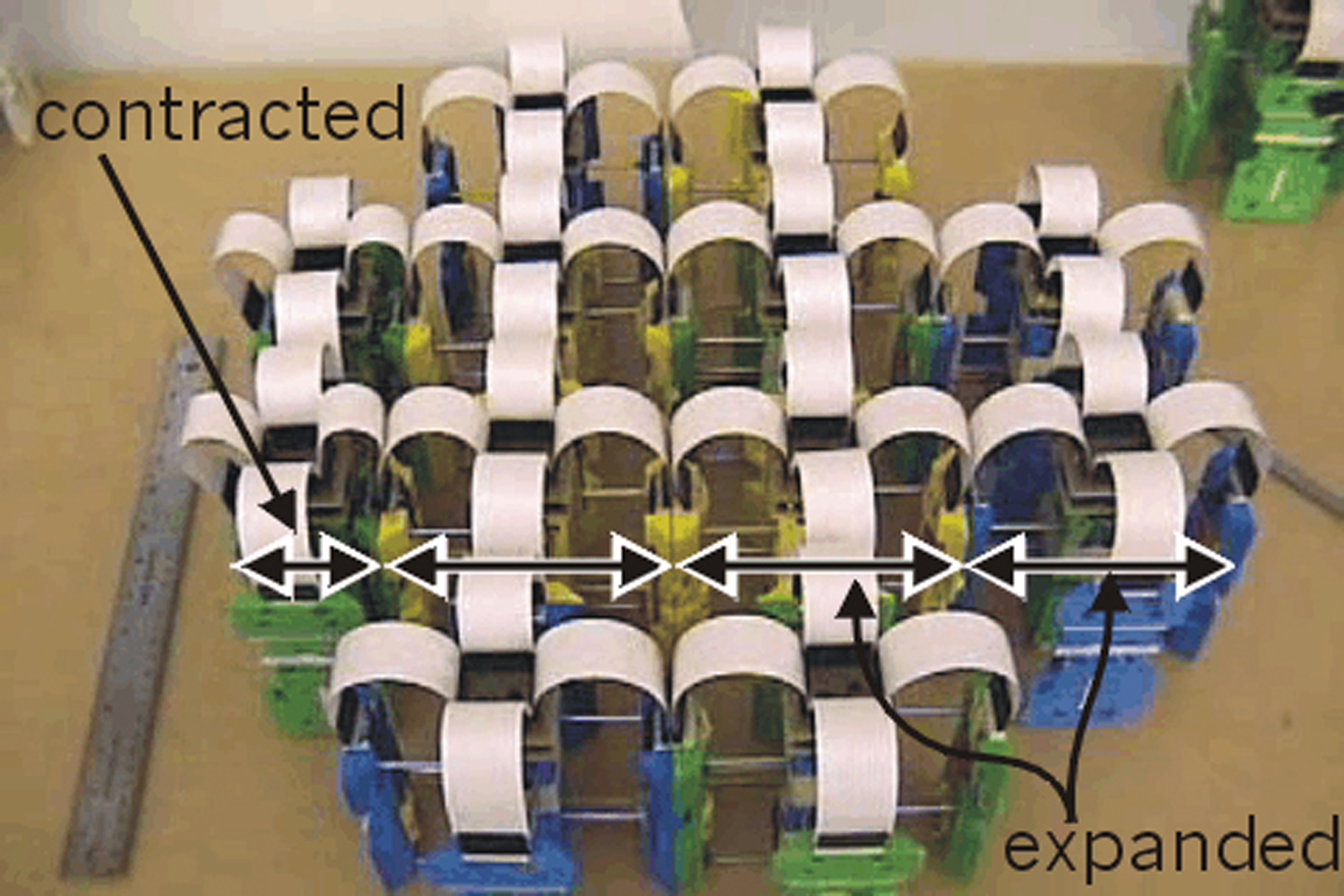
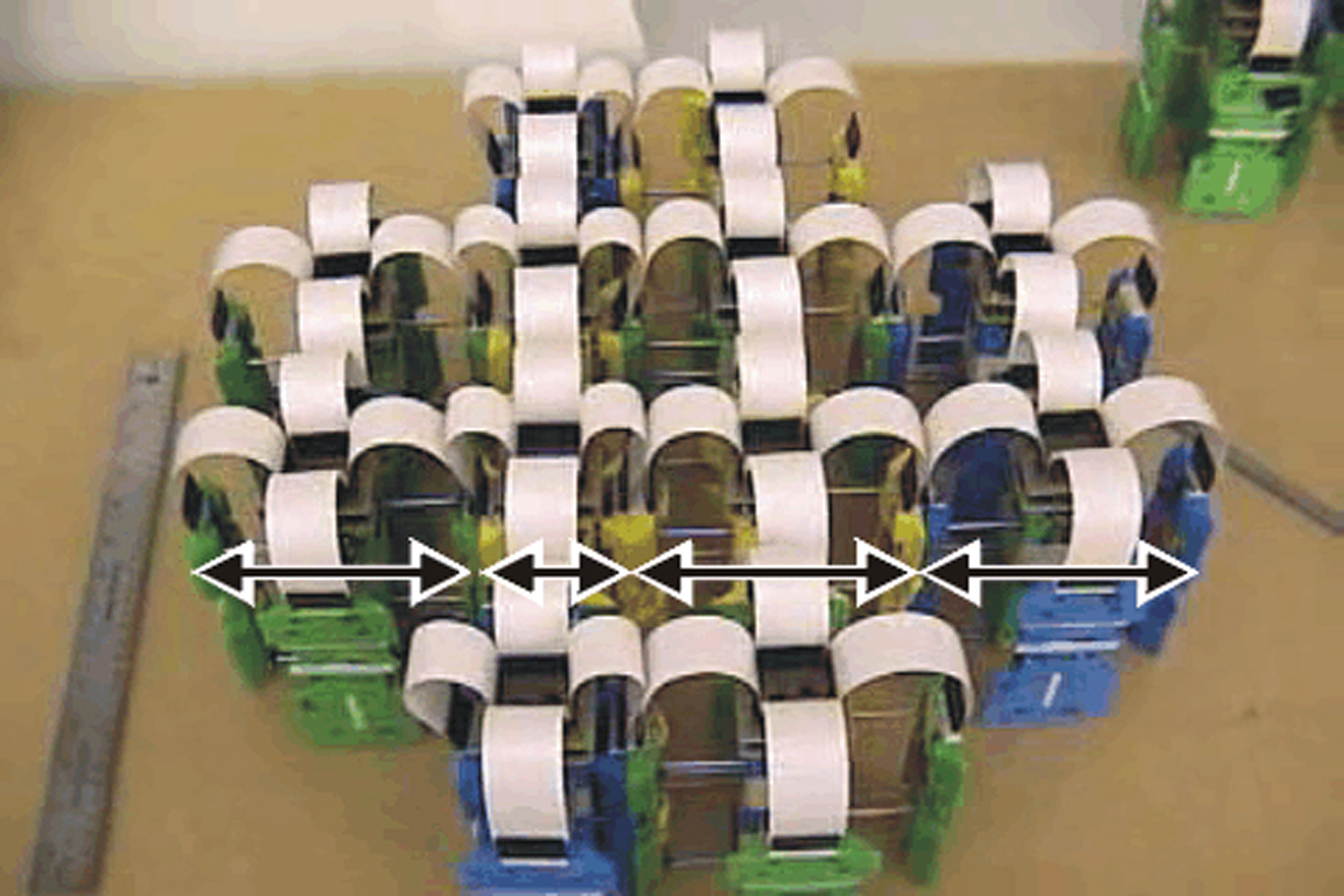
The Crystal Robot (Figure 1) has some of the motive properties of muscles and can be closely packed in 3D space by attaching units to each other. Each module actuates by expansion and contraction. By expanding and contracting neighbors in a connected structure, an individual module can be moved in general ways relative to the entire structure. Crystal modules never rotate relative to each other; their movement is actuated by sliding via expansion/ contraction. This basic operation leads to new algorithms for global self-reconfiguration planning. Each module has on-board processing, sensing, communication and power.
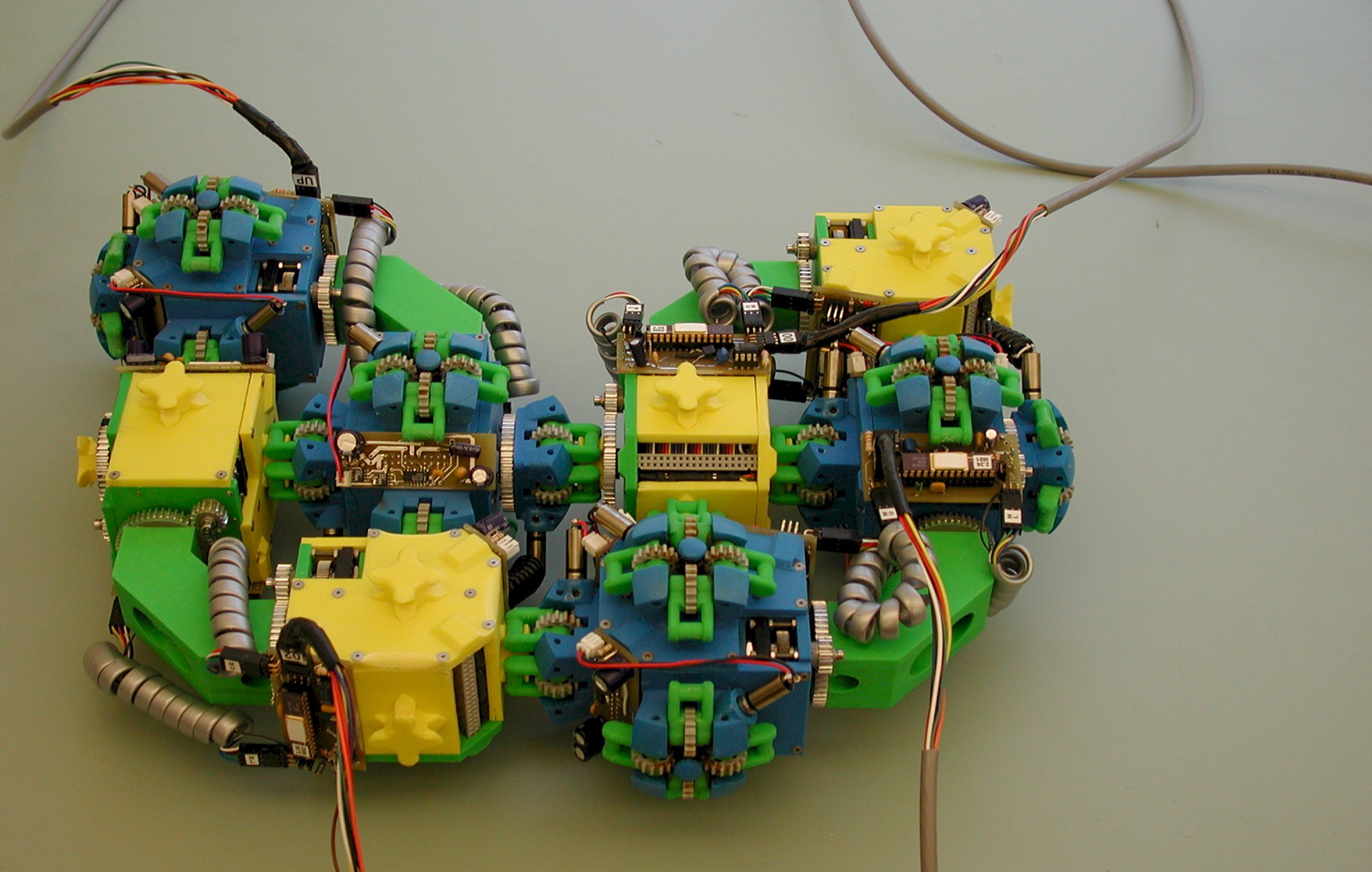
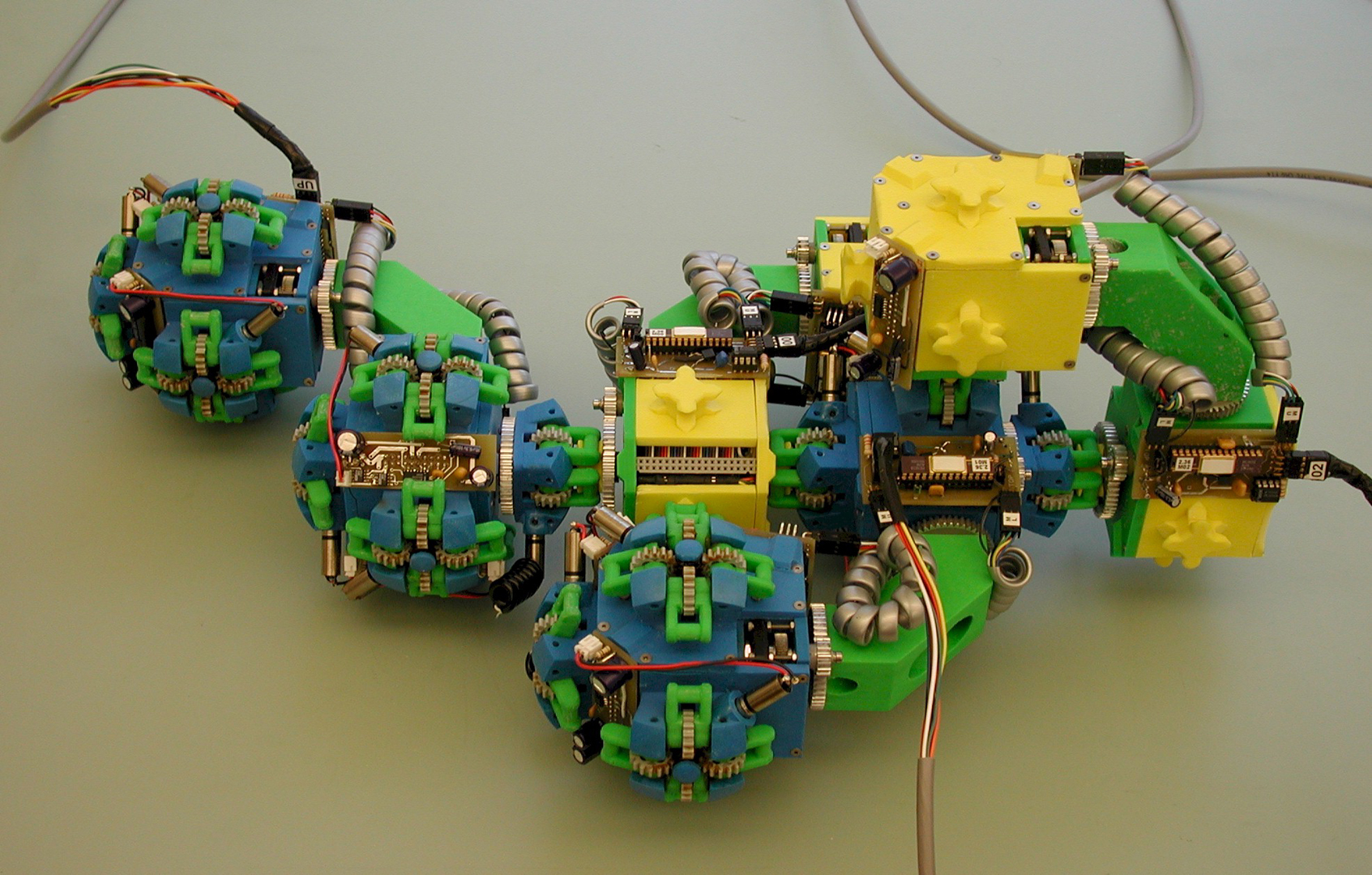
A Molecule Robot [Kotay and Rus 1999] consists of multiple units called Molecules; each Molecule consists of two atoms linked by a rigid connection called a bond (see Figure 2). Each atom has five inter-Molecule connection points and two degrees of freedom. One degree of freedom allows the atom to rotate 180
relative to its bond connection, and the other degree of freedom allows the atom (thus the entire Molecule) to rotate 180
relative to one of the inter-Molecule connectors at a right angle to the bond connection. A feature of our prototype is the use of a robust gripper-type connection mechanism.
Crystal and Molecule robots are dynamic structures. They can move using sequences of reconfigurations to implement locomotion gaits, and they can undergo shape metamorphosis. We have developed several planning algorithms (both centralized and distributed) to support these capabilities [Rus et al. 2002; Kotay and Rus 1999].
3 Conclusion
Creating self-reconfiguring robots is a considerable challenge which can be met through new designs for reconfigurable systems and new ideas on algorithmic planning and control. Our robots are very encouraging first steps toward creating new robotics applications.
Other Information:
References
KOTAY, K., AND RUS, D. 1999. Locomotion versatility through
self-reconfiguration. Robotics and Autonomous Systems 26,
217–232.
RUS, D., AND CHIRIKJIAN, G. 2001. Special issue on self-reconfigurable
robots. Autonomous Robots 10, 1, 1–124.
RUS, D., BUTLER, Z., KOTAY, K., AND VONA, M. 2002. Self-reconfiguring
robots. Communications of the ACM 45, 3, 39–45.