
“Advanced Technologies for Virtual Environments” by Whitton, Bishop, Brooks Jr., England, Fuchs, et al. …
Conference:
- SIGGRAPH 1997
-
More from SIGGRAPH 1997:


Type(s):
Entry Number: 27
Title:
- Advanced Technologies for Virtual Environments
Program Title:
- Electric Garden
Presenter(s):
- Mary C. Whitton
- Gary Bishop
- Frederick (Fred) P. Brooks Jr.
- Nick England
- Henry Fuchs
- Anselmo A. Lastra
- Dinesh Manoch
- John Poulton
- Russell Taylor
Project Affiliation:
- University of North Carolina at Chapel Hill
Description:
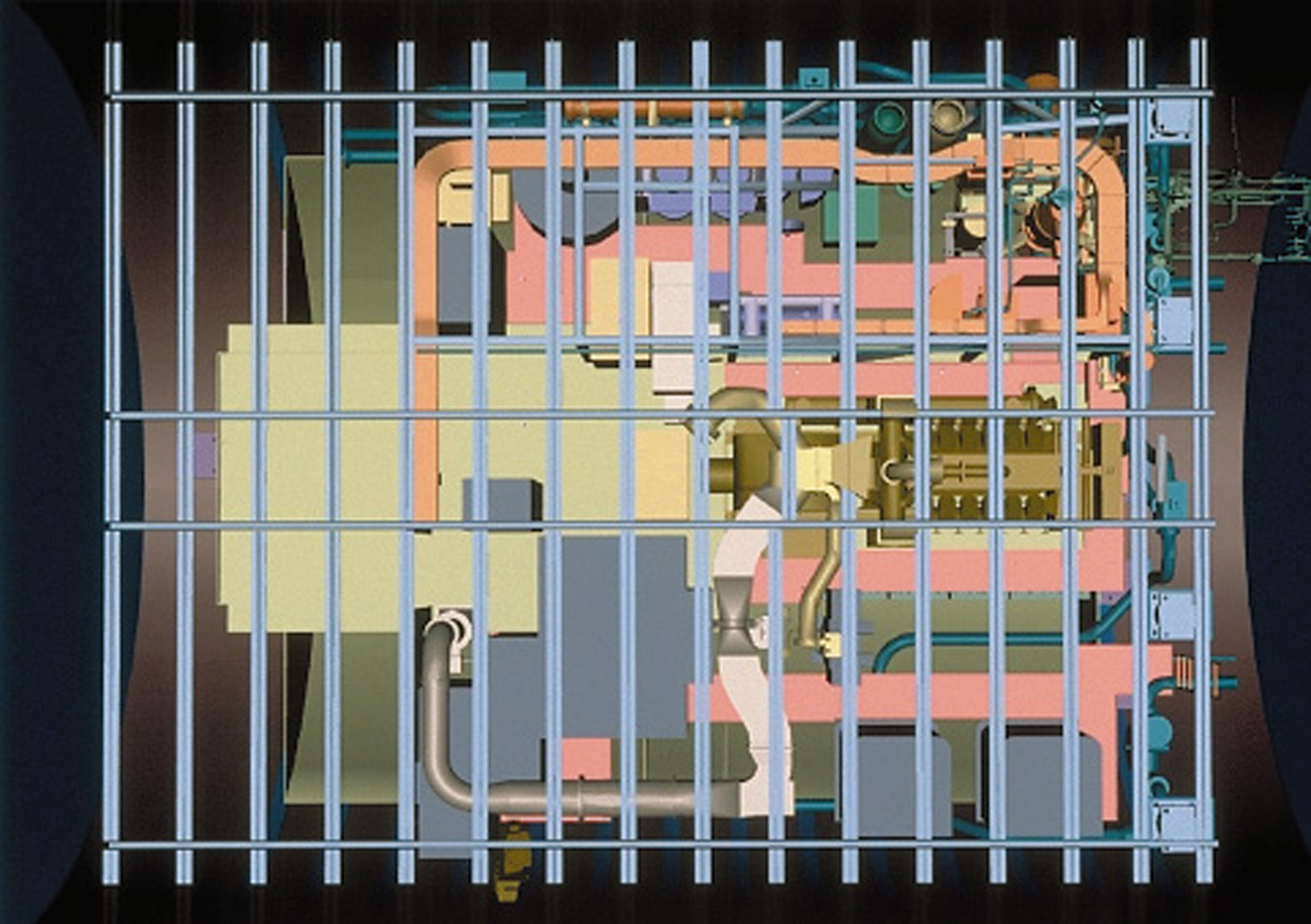
Walkthrough
Interactive visualizations for design of complex environments containing millions of primitives, such as those of houses and ships, are severely limit- ed by the frame rates obtainable using current graphics workstations. Use of advanced model-management techniques to reduce model complexity, while retaining essential visual information, makes interactive walk- throughs feasible. In this interactive experience, the user walks through a very large, complex model. It illustrates a variety of model-management techniques, such as visibility culling, dynamic tessellation of higher-order surfaces, static and dynamic model simplification, and textured impostors, to enable rendering at interactive rates.
http:/ /www.cs.unc.edu/~walk
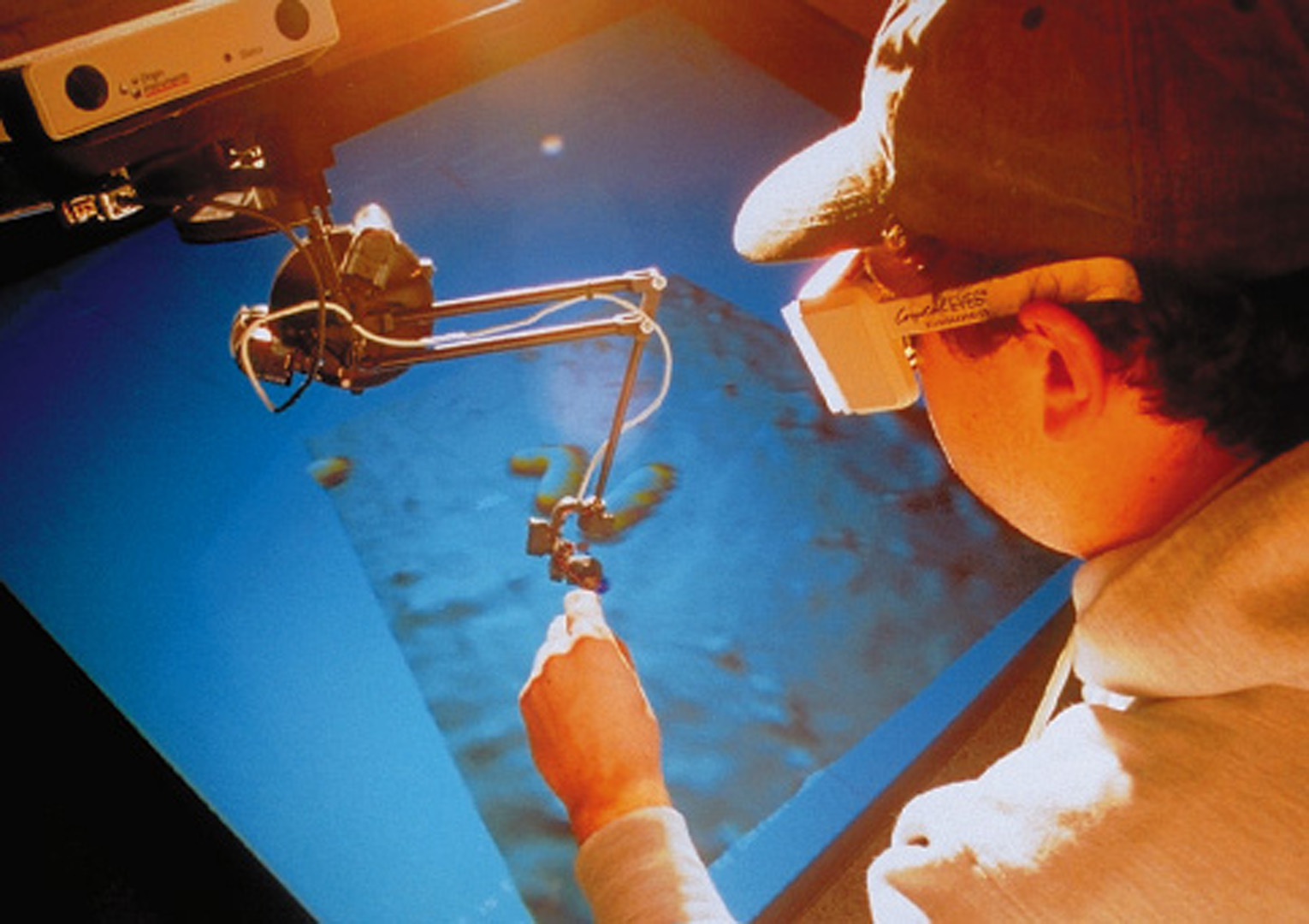
nanoManipulator
The nanoWorkbench adds a PHANToM force-feedback device to a rear- projected display to allow the user to touch the objects that are displayed. This overlay of the visual with haptic spaces provides the sense of a solid object that can be prodded and molded by the user. The nanoManipulator system is connected to an atomic-force microscope to allow participants to move, bend, and stack “bucky tubes” on a sub-micron playing field.
http:/ /www.cs.unc.edu/Research/nano.
Additional Images:



