“4 + 4 Fingers Direct Manipulation with Force Feedback” by Sato
Conference:
- SIGGRAPH 2000
-
More from SIGGRAPH 2000:


Type(s):
E-Tech Type(s):
- Wearables
Entry Number: 06
Title:
- 4 + 4 Fingers Direct Manipulation with Force Feedback
Presenter(s):
Collaborator(s):
Description:
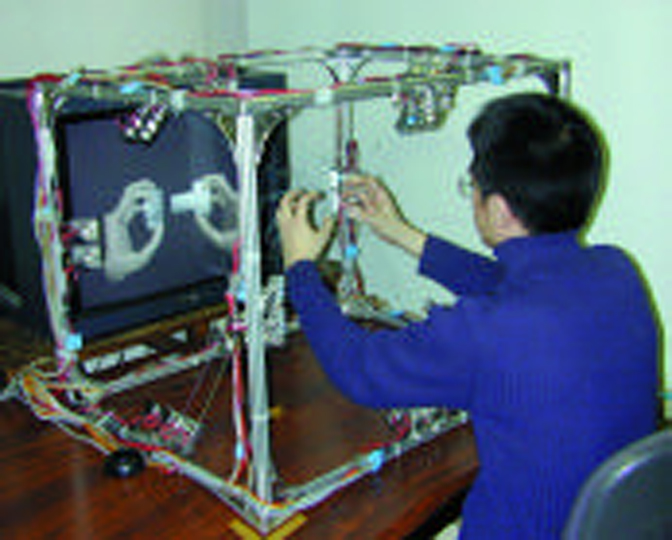
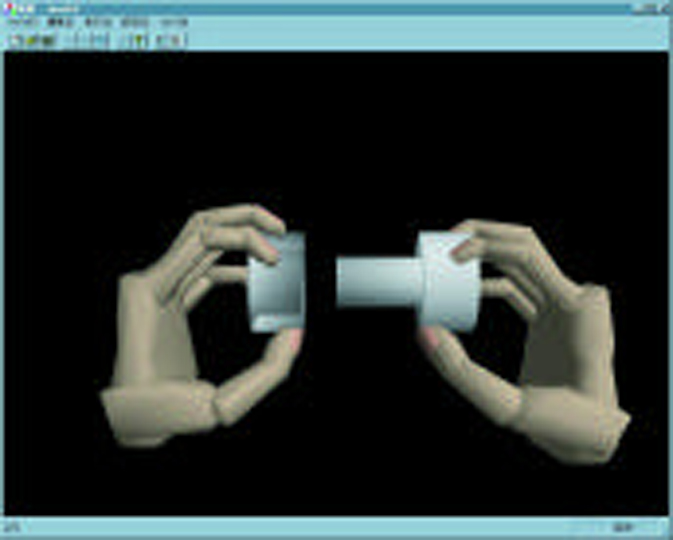
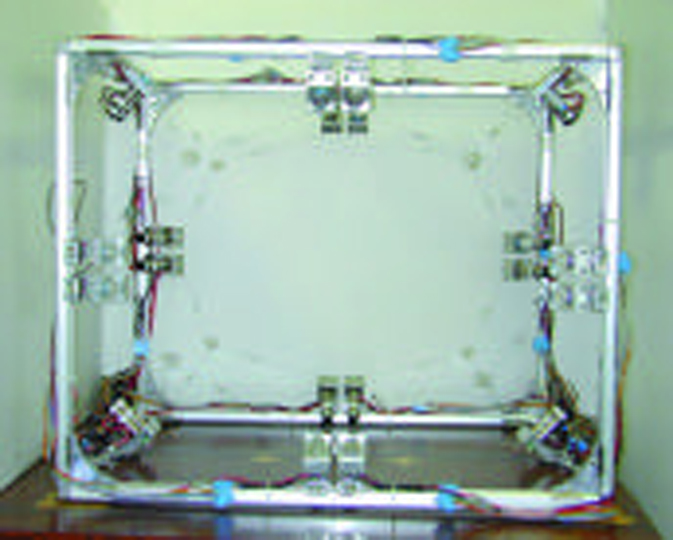
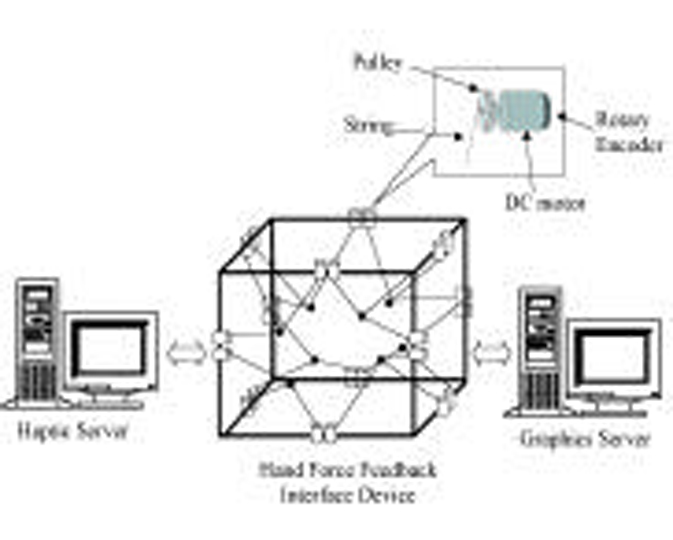
Unlike similar human interface devices for a direct manipulation environment with force feedback, 4+4 Fingers requires no gloves or heavy, complex metallic structures attached to the user’s hands. Users wear nothing more than small, lightweight fingertip devices on four fingers of each hand. They have a realistic sense that their hands are free, and they can make direct use of their hands in the manipulation environment. Without thinking about operating an input device, users can perform dexterous manipulations with one hand or collaborative movements with both hands as they naturally interact with virtual objects. In this 3D virtual world, users perceive force feedback generated by the device and discover the shape of the virtual object. They can move, rotate, or assemble two different virtual objects at the same time.
Additional Images: