Max Chandler: Silent Dancing
Artist(s):
Title:
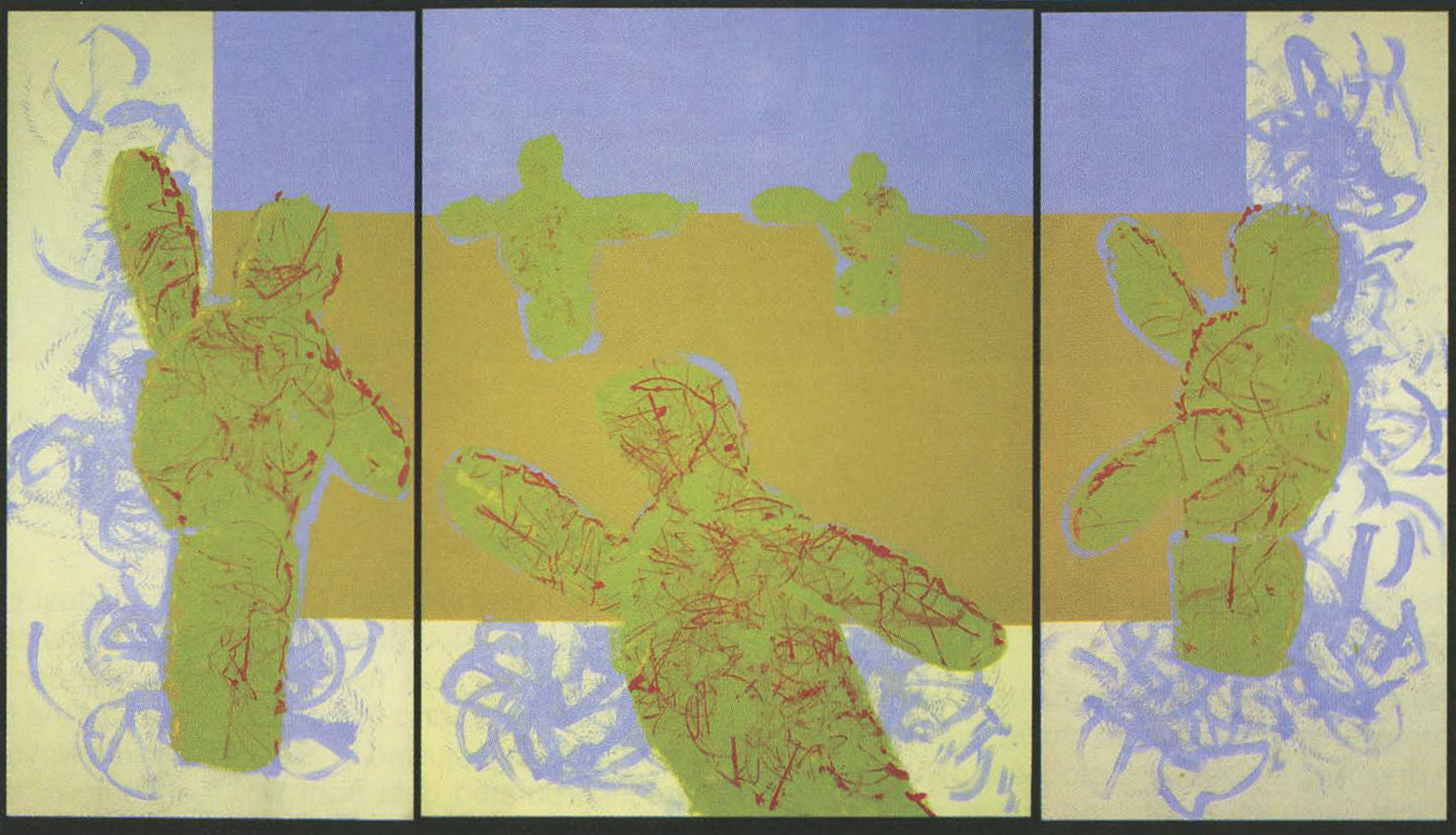
- Silent Dancing
Exhibition:
- SIGGRAPH 2007: Global Eyes
-
More artworks from SIGGRAPH 2007:


Creation Year:
- 2007
Medium:
- Robot-generated art, acrylic on canvas
Size:
- 48 inches x 84 inches x 1.5 inches
Category:
Artist Statement:
Paul Klee wrote a short text he titled “Taking a Line for a Walk.” To give this idea a 21st-century twist, I make autonomous mobile robots that are small enough to walk around the canvas and use paint brushes to make marks. The robots have a small computer on board and sensors that can see the surface of the canvas and the marks it has already made. I use these robots as a tool for painting – as a super brush that can make marks that humans cannot make alone. For instance, the robots can stay much closer to the actual lines of living growing things than we can with hand-eye coordination. They are also capable of truly random behavior that brings them closer to natural variation. I wish to make art that reflects our common lives. Two aspects of 21st-century life are inescapable: 1. The continuing discoveries and refinement of knowledge through science. I think the contemporary disrespect and distrust of science may be temporarily fashionable, but are certainly eternally foolish. 2. Most of us have become personally engaged with technology. Technology is no longer limited to affecting our work lives. Smart devices have a role in our personal lives as well. Whose life is not changed by one or more of the following devices: cell phone, notebook computer, internet search engines, email? Smart devices depend on small-to-large computers as part of their make-up and involve a combination of mechanics, electronics, controllers, and programming. Using a similar tool to make art reflects who we are and our lives today. I use simple, very focused, small robots as a tool to integrate both aspects into art that is science-informed and engaged with technology in obvious and not-so-obvious ways.
Technical Information:
This robot-generated art uses behavior-based Java programs that incorporate logarithmic spiral fragments and randomly generated variations. The robots work as a tool or collaborator for the artist and use a large “vocabulary” of paint brushes and painting techniques. Every brushstroke
on the canvas was made by the robots, including flat fills of rectangular and organic shapes. The robots have simple mechanics and electronics but use very sophisticated programming and behavior-based subsumption architecture. Although the paintings can be made by one or more robots, each robot has the same programming. Drivers and configuration parameters change for each individual robot, but the core programming remains the same. The robots are capable of a number of painting behaviors, including shape following by observing the canvas and following shapes they detect, shape outlining and filling from a stored vector
description, and generating lines from formulas for spiral fragments, arcs, and sine waves with phase shifting. The robots have overriding randomized disturbances of their normal behaviors to produce nature-like variations. Although the robot’s path remains true to the underlying math, the line produced will have bumps, blotches, wiggles, etc., due to the disturbances.