
“Vectorfield Isosurface-based Reconstruction from Oriented Points” by Sibley and Taubin
Conference:
Type(s):
Title:
- Vectorfield Isosurface-based Reconstruction from Oriented Points
Presenter(s)/Author(s):
Abstract:
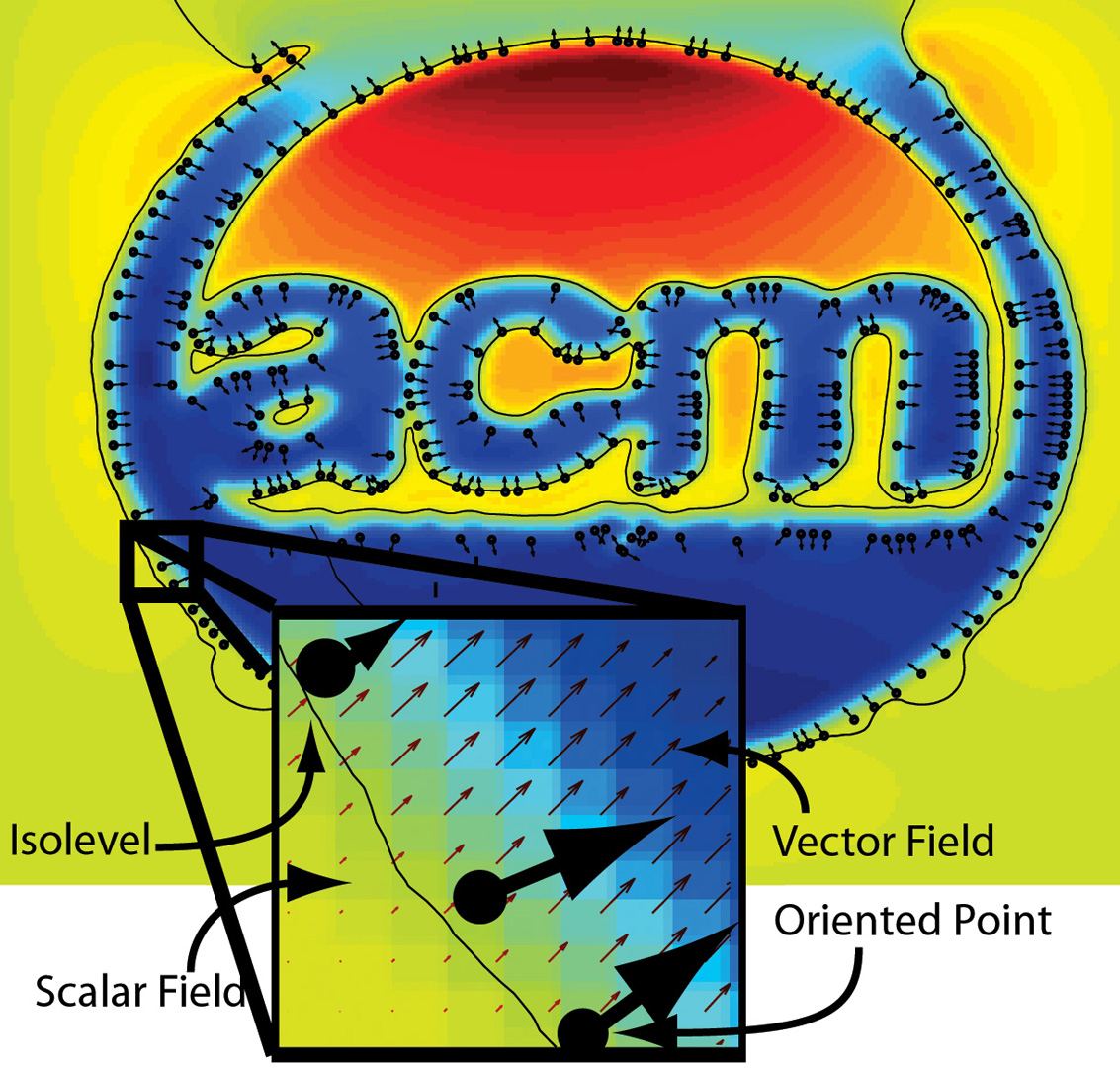
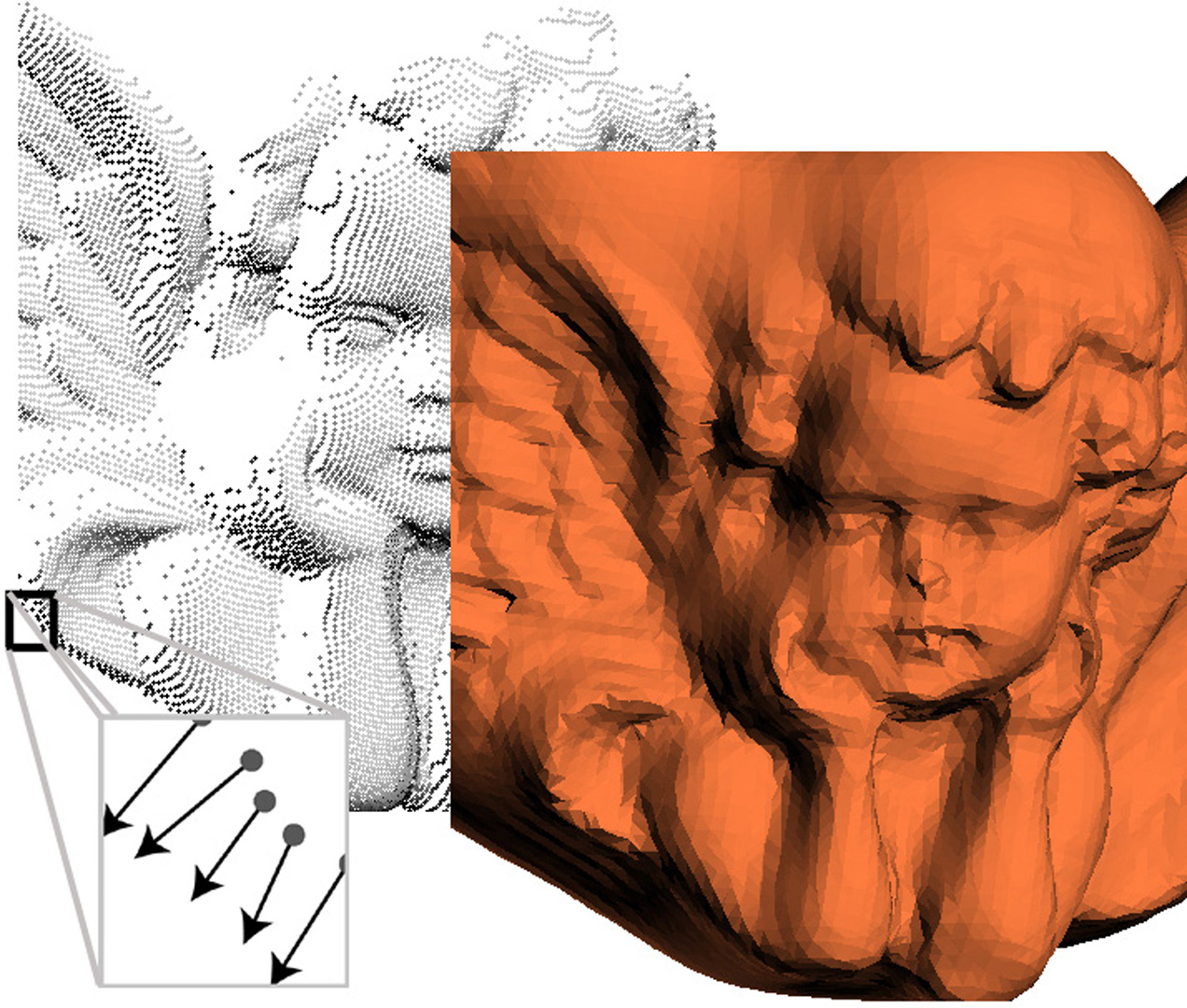
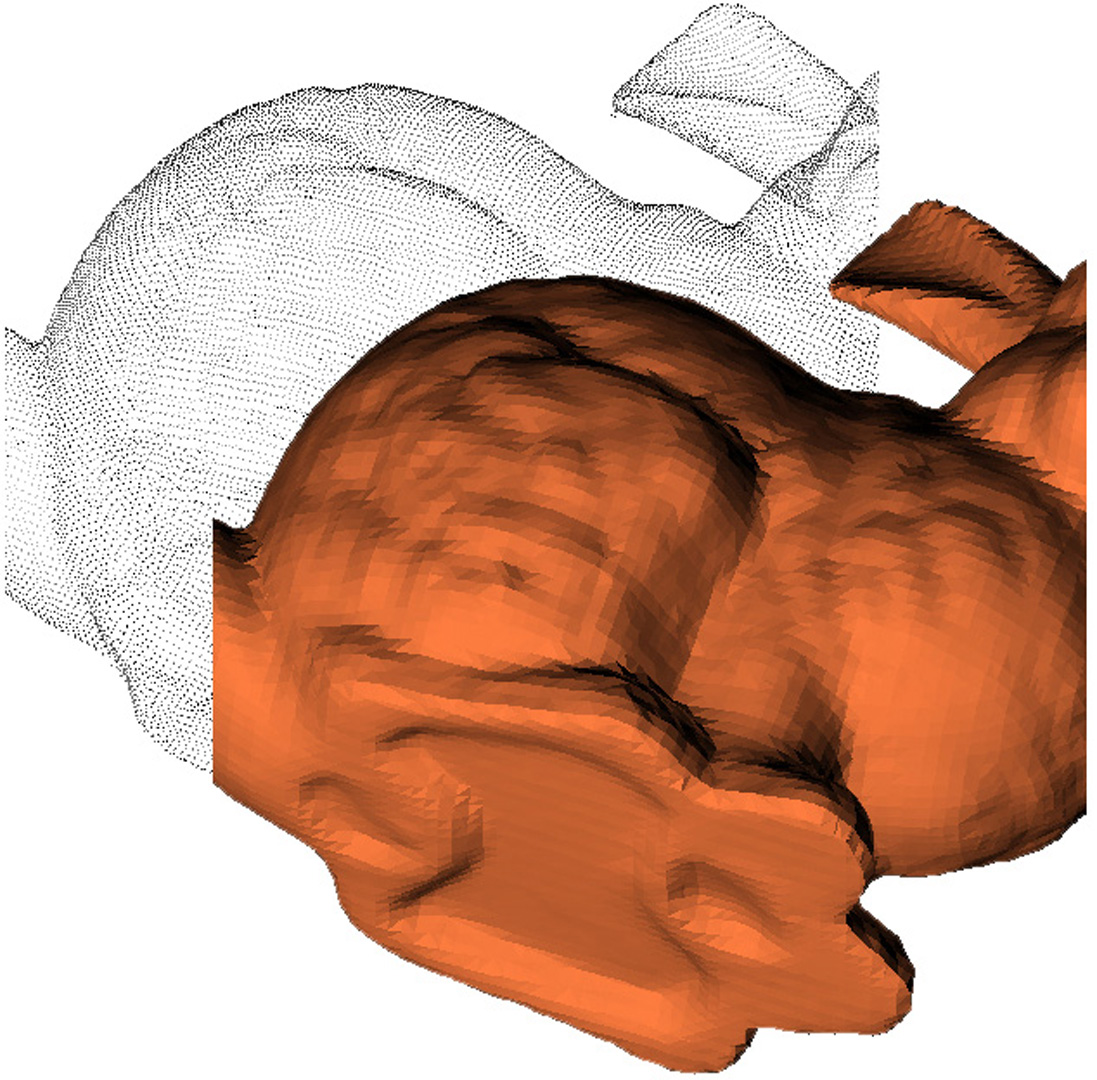
We present a new and much simpler formulation for the problem of reconstructing an implicit surface from an oriented point cloud acquired by a range scanner or a stereo vision system. Data vectors are first extended to a continuous vector field on a bounding volume, which is then integrated in the least squares sense yielding an implicit function whose zero level set approximates the data points. Function discretizations associated with regular grids automatically produce Iso-surface polygon meshes. Extrapolating missing and noisy data, integrating multiple scans, developing data structures and algorithms optimized for fast visualization and geometry processing, are challenging problems and active areas of research ad- dressed by this work. We plan to use multi-resolution data structures to integrate streams of point clouds in real time.
References:
Ohtake, Y., Belyaev, A., Alexa, M., Turk, G., and Seidel, H.-P. 2003. Multi-level partition of unity implicits. ACM Trans. Graph. 22, 3, 463–470.
Tasdizen, T., Whitaker, R., Burchard, P., and Osher, S. 2003. Geometric surface processing via normal maps. ACM Trans. Graph. 22, 4, 1012–1033.