
“Task-based locomotion”
Conference:
Type(s):
Title:
- Task-based locomotion
Session/Category Title: MOTION CONTROL
Presenter(s)/Author(s):
Moderator(s):
Abstract:
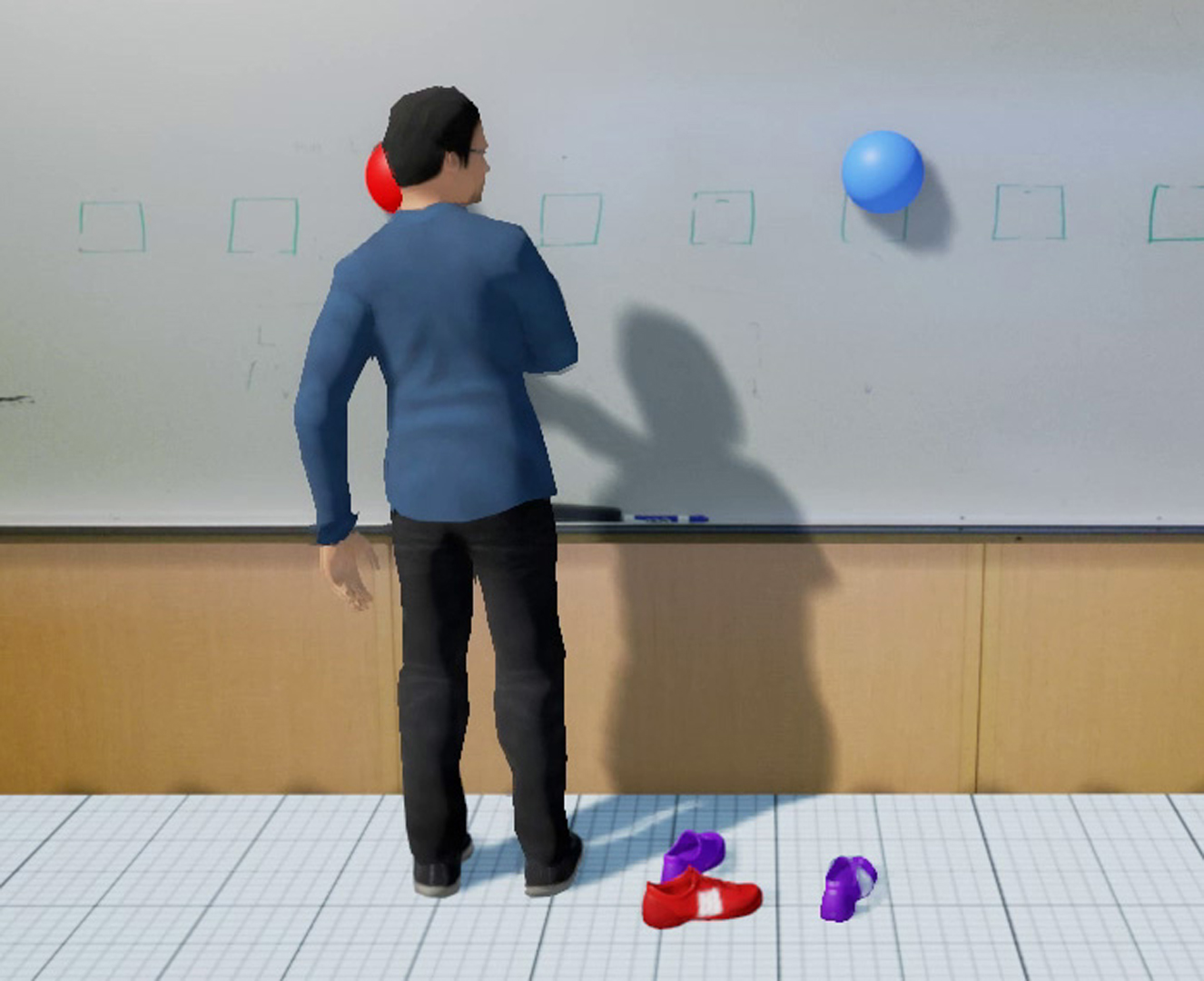
High quality locomotion is key to achieving believable character animation, but is often modeled as a generic stepping motion between two locations. In practice, locomotion often has task-specific characteristics and can exhibit a rich vocabulary of step types, including side steps, toe pivots, heel pivots, and intentional foot slides. We develop a model for such types of behaviors, based on task-specific foot-step plans that act as motion templates. The footstep plans are invoked and optimized at interactive rates and then serve as the basis for producing full body motion. We demonstrate the production of high-quality motions for three tasks: whiteboard writing, moving boxes, and sitting behaviors. The model enables retargeting to characters of varying proportions by yielding motion plans that are appropriately tailored to these proportions. We also show how the task effort or duration can be taken into account, yielding coarticulation behaviors.
References:
1. Aristidou, A., and Lasenby, J. 2011. Fabrik: A fast, iterative solver for the inverse kinematics problem. Graphical Models 73, 5, 243–260. Google ScholarDigital Library
2. Bai, Y., Siu, K., and Liu, C. K. 2012. Synthesis of concurrent object manipulation tasks. ACM Transactions on Graphics (TOG) 31, 6, 156. Google ScholarDigital Library
3. Beaudoin, P., Coros, S., van de Panne, M., and Poulin, P. 2008. Motion-motif graphs. In Proceedings of the 2008 ACM SIGGRAPH/Eurographics Symposium on Computer Animation, Eurographics Association, Aire-la-Ville, Switzerland, Switzerland, SCA ’08, 117–126. Google ScholarDigital Library
4. Brand, M., and Hertzmann, A. 2000. Style machines. In Proceedings of the 27th Annual Conference on Computer Graphics and Interactive Techniques, ACM Press/Addison-Wesley Publishing Co., New York, NY, USA, SIGGRAPH ’00, 183–192. Google ScholarDigital Library
5. Chai, J., and Hodgins, J. 2007. Constraint-based motion optimization using a statistical dynamic model. ACM Transactions on Graphics (TOG) 26, 3, 8. Google ScholarDigital Library
6. Chestnutt, J., Lau, M., Cheung, G., Kuffner, J., Hodgins, J., and Kanade, T. 2005. Footstep planning for the honda asimo humanoid. In Robotics and Automation, 2005. ICRA 2005. Proceedings of the 2005 IEEE International Conference on, 629–634.Google Scholar
7. Choi, M. G., Lee, J., and Shin, S. Y. 2003. Planning biped locomotion using motion capture data and probabilistic roadmaps. ACM Transactions on Graphics (TOG) 22, 2, 182–203. Google ScholarDigital Library
8. Feng, A. W., Xu, Y., and Shapiro, A. 2012. An example-based motion synthesis technique for locomotion and object manipulation. In Proceedings of the ACM SIGGRAPH Symposium on Interactive 3D Graphics and Games, ACM, 95–102. Google ScholarDigital Library
9. Grochow, K., Martin, S. L., Hertzmann, A., and Popović, Z. 2004. Style-based inverse kinematics. In ACM SIGGRAPH 2004 Papers, ACM, New York, NY, USA, SIGGRAPH ’04, 522–531. Google ScholarDigital Library
10. Kovar, L., Gleicher, M., and Pighin, F. 2002. Motion graphs. ACM Transactions on Graphics, 473–482. Google ScholarDigital Library
11. Kuffner, J. J., J., Nishiwaki, K., Kagami, S., Inaba, M., and Inoue, H. 2001. Footstep planning among obstacles for biped robots. In Intelligent Robots and Systems, 2001. Proceedings. 2001 IEEE/RSJ International Conference on, vol. 1, 500–505 vol. 1.Google Scholar
12. Kuffner, J., Kagami, S., Nishiwaki, K., Inaba, M., and Inoue, H. 2003. Online footstep planning for humanoid robots. In Robotics and Automation, 2003. Proceedings. ICRA ’03. IEEE International Conference on, vol. 1, 932–937 vol. 1.Google Scholar
13. Lau, M., and Kuffner, J. J. 2005. Behavior planning for character animation. In Proceedings of the 2005 ACM SIGGRAPH/Eurographics symposium on Computer animation, ACM, 271–280. Google ScholarDigital Library
14. Lee, J., and Lee, K. H. 2006. Precomputing avatar behavior from human motion data. Graphical Models 68, 2, 158–174. Google ScholarDigital Library
15. Lee, J., Chai, J., Reitsma, P. S., Hodgins, J. K., and Pollard, N. S. 2002. Interactive control of avatars animated with human motion data. In ACM Transactions on Graphics (TOG), vol. 21, ACM, 491–500. Google ScholarDigital Library
16. Lee, K. H., Choi, M. G., and Lee, J. 2006. Motion patches: building blocks for virtual environments annotated with motion data. In ACM Transactions on Graphics (TOG), vol. 25, ACM, 898–906. Google ScholarDigital Library
17. Levine, S., Wang, J. M., Haraux, A., Popović, Z., and Koltun, V. 2012. Continuous character control with low-dimensional embeddings. ACM Transactions on Graphics (TOG) 31, 4, 28. Google ScholarDigital Library
18. Lo, W.-Y., and Zwicker, M. 2008. Real-time planning for parameterized human motion. In Symposium on Computer Animation, Eurographics Association, 29–38. Google ScholarDigital Library
19. Min, J., and Chai, J. 2012. Motion graphs++: A compact generative model for semantic motion analysis and synthesis. ACM Trans. Graph. 31, 6 (Nov.), 153:1–153:12. Google ScholarDigital Library
20. Min, J., Liu, H., and Chai, J. 2010. Synthesis and editing of personalized stylistic human motion. In Proceedings of the 2010 ACM SIGGRAPH Symposium on Interactive 3D Graphics and Games, ACM, New York, NY, USA, I3D ’10, 39–46. Google ScholarDigital Library
21. Mombaur, K., Truong, A., and Laumond, J.-P. 2010. From human to humanoid locomotionan inverse optimal control approach. Autonomous robots 28, 3, 369–383. Google ScholarDigital Library
22. Nakamura, Y., and Hanafusa, H. 1986. Inverse kinematic solutions with singularity robustness for robot manipulator control. Journal of dynamic systems, measurement, and control 108, 3, 163–171.Google ScholarCross Ref
23. Safonova, A., and Hodgins, J. K. 2007. Construction and optimal search of interpolated motion graphs. ACM Trans. Graph. 26, 3 (July). Google ScholarDigital Library
24. Tolani, D., Goswami, A., and Badler, N. I. 2000. Realtime inverse kinematics techniques for anthropomorphic limbs. Graphical Models 62, 5, 353–388. Google ScholarDigital Library
25. Treuille, A., Lee, Y., and Popović, Z. 2007. Near-optimal character animation with continuous control. ACM Transactions on Graphics (TOG) 26, 3. Google ScholarDigital Library
26. van Basten, B. J. H., Stüvel, S. A., and Egges, A. 2011. A hybrid interpolation scheme for footprint-driven walking synthesis. In Proceedings of Graphics Interface 2011, Canadian Human-Computer Communications Society, School of Computer Science, University of Waterloo, Waterloo, Ontario, Canada, GI ’11, 9–16. Google ScholarDigital Library
27. Van De Panne, M. 1997. From footprints to animation. Computer Graphics Forum 16, 4, 211–223.Google ScholarCross Ref
28. Vicon. http://www.vicon.com/. Accessed: 31-05-2015.Google Scholar
29. Wang, J., Fleet, D., and Hertzmann, A. 2007. Multifactor gaussian process models for style-content separation. In Proceedings of the 24th international conference on Machine learning, ACM, 975–982. Google ScholarDigital Library
30. Wei, X., Min, J., and Chai, J. 2011. Physically valid statistical models for human motion generation. ACM Trans. Graph. 30, 3 (May), 19:1–19:10. Google ScholarDigital Library
31. Yamane, K., and Sok, K. 2010. Planning and synthesizing superhero motions. Motion in Games, 254–265. Google ScholarDigital Library
32. Yamane, K., Kuffner, J. J., and Hodgins, J. K. 2004. Synthesizing animations of human manipulation tasks. ACM Trans. Graph. 23, 3 (Aug.), 532–539. Google ScholarDigital Library