
“Six degree-of-freedom haptic rendering using voxel sampling” by McNeely, Puterbaugh and Troy
Conference:
Type(s):
Title:
- Six degree-of-freedom haptic rendering using voxel sampling
Presenter(s)/Author(s):
Abstract:
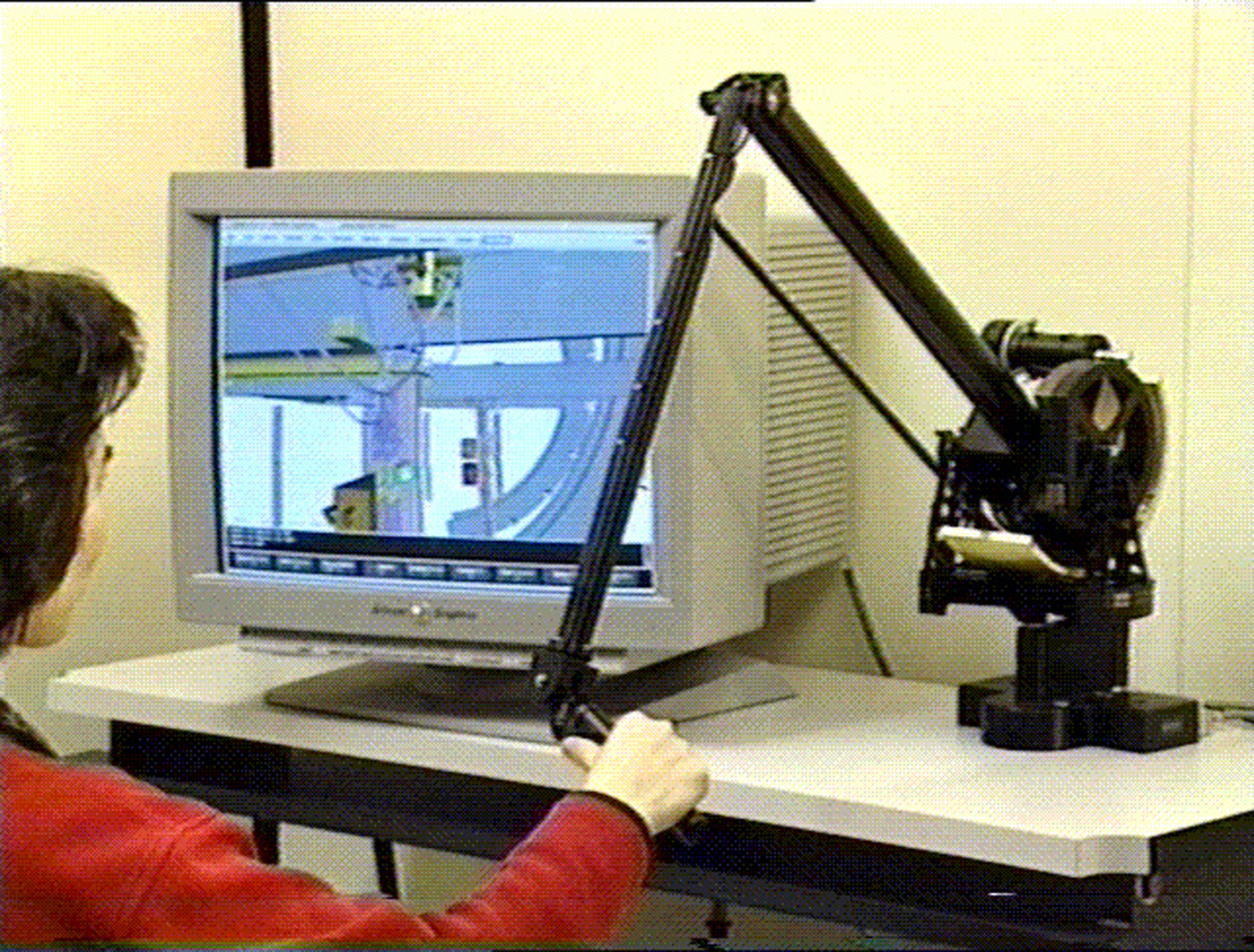
A simple, fast, and approximate voxel-based approach to 6-DOF haptic rendering is presented. It can reliably sustain a 1000 Hz haptic refresh rate without resorting to asynchronous physics and haptic rendering loops. It enables the manipulation of a modestly complex rigid object within an arbitrarily complex environment of static rigid objects. It renders a short-range force field surrounding the static objects, which repels the manipulated object and strives to maintain a voxel-scale minimum separation distance that is known to preclude exact surface interpenetration. Force discontinuities arising from the use of a simple penalty force model are mitigated by a dynamic simulation based on virtual coupling. A generalization of octree improves voxel memory efficiency. In a preliminary implementation, a commercially available 6-DOF haptic prototype device is driven at a constant 1000 Hz haptic refresh rate from one dedicated haptic processor, with a separate processor for graphics. This system yields stable and convincing force feedback for a wide range of user controlled motion inside a large, complex virtual environment, with very few surface interpenetration events. This level of performance appears suited to applications such as certain maintenance and assembly task simulations that can tolerate voxel-scale minimum separation distances.
References:
1. Adachi, T., Kumano, T., Ogino, K., “Intermediate Representations for Stiff Virtual Objects,” Proc. IEEE Virtual Reality Annual Intl. Symposium, pp. 203-210, 1995.
2. Adams, R.J. and Hannaford, B., “A Two-Port Framework for the Design of Unconditionally Stable Haptic Interfaces,” Proc. IROS, Anaheim CA, 1998.
3. Avila, R.S. and Sobierajski, L.M., “A Haptic Interaction Method for Volume Visualization,” Proc. Visualization’ 96, pp. 197-204, Oct. 1996.
4. Baraff, D., “Curved Surfaces and Coherence for Non-Penetrating Rigid Body Simulation,” Computer Graphics (proc. SIGGRAPH 90), vol 24, no. 4, pp. 19-28, Aug. 1990.
5. Baraff, D., “Fast Contact Force Computation for Nonpenetrating Rigid Bodies,” Computer Graphics (proc. SIGGRAPH 94), pp. 23-42, July 1994.
6. Berkelman, EJ. and Hollis, R.L., “Dynamic performance of a hemispherical magnetic levitation haptic interface device,” in SPIE Int. Symposium on Intelligent Systems and Intelligent Manufacturing, (Proc. SPIE), Vol. 3602, Greensburg PAL, Sept. 1997.
7. Brooks, RE, Ouh-Young, M., Batter, J.J., Jerome, E, “Project GROPE Haptic Displays for Scientific Visualization,” Computer Graphics (proc. SIGGRAPH 90), pp. 177-185, Aug. 1990.
8. Cohen, J.D., Lin, M.C., Manocha, D., and Ponamgi, M.K., “I- COLLIDE: An Interactive and Exact Collision Detection System for Large-Scale Environments,” Computer Graphics (proc. SIGGRAPH 95), pp. 189-196, Aug. 1995.
9. Clover, C.L., Control system design for robots used in simulating dynamic force and moment interaction in virtual reality applications, Ph.D. thesis, Iowa State University, Ames, IA, Apr. 1996.
10. Colgate, J.E., Grating, EE., Stanley, M.C., and Schenkel, G., “Implementation of Stiff Virtual Walls in Force-Reflecting Interfaces,” Proc. IEEE Virtual Reality Annual International Symposium (VRAIS), Seattle, WA, pp. 202-208, Sept., 1993.
11. Craig, J.J., Introduction to Robotics: Mechanics and Control. 2nd ed., Addison-Wesley, Reading MA, 1989.
12. Garcia-Alonso, A., Serrano, N., and Flaquer J., “Solving the Collision Detection Problem,” IEEE Computer Graphics and Applications, vol. 14, no. 3, pp. 36-43, 1994.
13. Gottschalk, S., Lin, M.C., Manocha, D., “OBBTree: A Hierarchical Structure for Rapid Interference Detection,” Computer Graphics (proc. SIGGRAPH 96), pp. 171-180, Aug. 1996.
14. Jackins, C., and Tanimoto, S.L., “Oct-Trees and Their Use in Representing Three-Dimensional Objects,” Computer Graphics and Image Processing, vol. 14, no. 3, pp. 249-270, 1980.
15. Kaufman, A., Cohen, D., Yagle, R., “Volume Graphics,” IEEE Computer, 26(7), pp. 51-64, July, 1993.
16. Logan, I.E, Wills D.EM., Avis N.J., Mohsen, A.M.M.A., and Sherman, K.E, “Virtual Environment Knee Arthroscopy Training System,” Society for Computer Simulation, Simulation Series, vol. 28, no. 4, pp. 17-22, 1996.
17. Mark, W.R., Randolph, S.C., Finch, M., Van Verth, J.M., and Taylor II, R.M., “Adding Force Feedback to Graphics Systems: Issues and Solutions,” Computer Graphics (proc. SIG- GRAPH 96), pp. 447-452, Aug. 1996.
18. Massie, T.H. and Salisbury, J.K., “The Phantom Haptic Interface: A Device for Probing Virtual Objects,” Proc. of the ASME International Mechanical Engineering Congress and Exhibition, Chicago, pp. 295-302, 1994.
19. Mirtich, B. and Canny, J., “Impulse-based Dynamic Simulation.” Proceedings of Workshop on Algorithmic Foundations of Robotics, Feb. 1994.
20. OpenGL Architecture Review Board, Woo, M., Neider, J., and Davis, T. OpenGL Programming Guide, 2nd, Addison-Wesley, Reading, MA, 1997.
21. Ruspini, D.C., Kolarov, K., and Khatib, O., “The Haptic Display of Complex Graphical Environments,” Computer Graphics (Proc. SIGGRAPH 97), pp. 345-352, Aug. 1997.
22. Sclaroff, S. and Pentland, A., “Generalized Implicit Functions for Computer Graphics,” Computer Graphics (Proc. SIG- GRAPH 96), pp. 247-250, July, 1991.
23. Witkin A. and Welch, W., “Fast Animation and Control of Nonrigid Structures,” Computer Graphics (Proc. SIGGRAPH 90), pp. 243-252, Aug. 1990.
24. Yokokohji, Y., Hollis, R.L., and Kanade, T., “What you can see is what you can feel. Development of a visual/haptic interface to virtual environment,” Proc. IEEE Virtual Reality Annual Int. Symposium (VRAIS), pp. 46-53, Mar., 1996.
25. Zilles, C.B. and Salisbury, J.K., “A Constraint-based Godobject Method for Haptics Display,” Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Pittsburgh, PAL, pp. 146-151, 1995.