
“SIMBICON: simple biped locomotion control” by Yin, Loken and Panne
Conference:
Type(s):
Title:
- SIMBICON: simple biped locomotion control
Presenter(s)/Author(s):
Abstract:
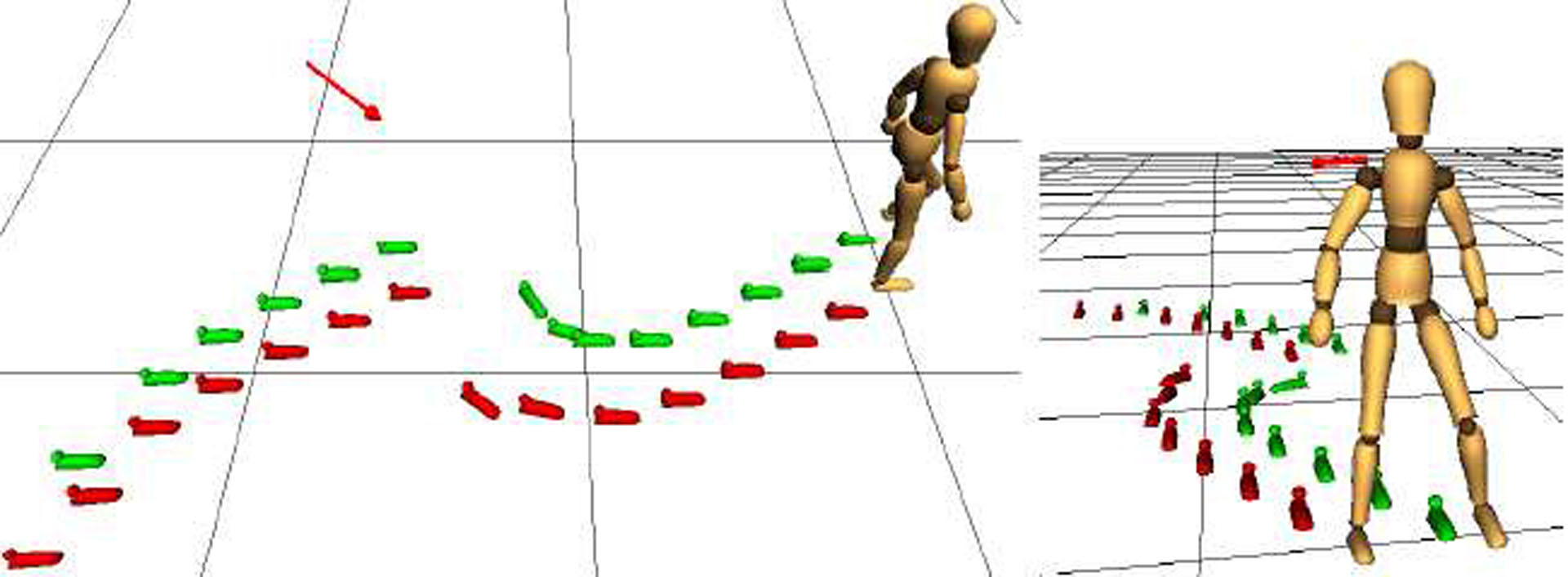
Physics-based simulation and control of biped locomotion is difficult because bipeds are unstable, underactuated, high-dimensional dynamical systems. We develop a simple control strategy that can be used to generate a large variety of gaits and styles in real-time, including walking in all directions (forwards, backwards, sideways, turning), running, skipping, and hopping. Controllers can be authored using a small number of parameters, or their construction can be informed by motion capture data. The controllers are applied to 2D and 3D physically-simulated character models. Their robustness is demonstrated with respect to pushes in all directions, unexpected steps and slopes, and unexpected variations in kinematic and dynamic parameters. Direct transitions between controllers are demonstrated as well as parameterized control of changes in direction and speed. Feedback-error learning is applied to learn predictive torque models, which allows for the low-gain control that typifies many natural motions as well as producing smoother simulated motion.
References:
1. Auslander, J., Fukunaga, A., Partovi, H., Christensen, J., Hsu, L., Reiss, P., Shuman, A., Marks, J., and Ngo, J. T. 1995. Further experience with controller-based automatic motion synthesis for articulated figures. ACM Trans. on Graphics 14, 4, 311–336. Google ScholarDigital Library
2. Dasgupta, A., and Nakamura, Y. 1999. Making feasible walking motion of humanoid robots from human motion capture data. In Robotics and Automation, vol. 2, 1044–1049.Google ScholarCross Ref
3. Faloutsos, P., van de Panne, M., and Terzopoulos, D. 2001. Composable controllers for physics-based character animation. Proc. ACM SIGGRAPH, 251–260. Google ScholarDigital Library
4. Hodgins, J. K., and Pollard, N. S. 1997. Adapting simulated behaviors for new characters. In Proceedings of SIGGRAPH ’97, 153–162. Google ScholarDigital Library
5. Hodgins, J. K., Wooten, W. L., Brogan, D. C., and O’Brien, J. F. 1995. Animating human athletics. In SIGGRAPH ’95: Proceedings of the 22nd annual conference on Computer graphics and interactive techniques, 71–78. Google ScholarDigital Library
6. Hodgins, J. K. 1991. Biped gait transitions. In Proceedings of the IEEE International Conference on Robotics and Automation.Google ScholarCross Ref
7. Honda Motor Co., L., 2006. Studies of leg/foot functions of the robot, http://world.honda.com/asimo/p3/technology/.Google Scholar
8. Kaneko, K., Kanehiro, F., Kajita, S., Yokoyama, K., Akachi, K., Kawasaki, T., Ota, S., and Isozumi, T. 2002. Design of prototype humanoid robotics platform for HRP. IEEE/RSJ Intl. Conf. on Intell. Robots and Systems.Google Scholar
9. Kawato, M., Furukawa, K., and Suzuki, R. 1987. A hierarchical neural-network model for control and learning of voluntary movement. Biological Cybernetics 57, 3, 169–185.Google ScholarCross Ref
10. Kim, J., Park, I., and Oh, J. 2006. Experimental realization of dynamic walking of the biped humanoid robot KHR-2 using zero moment point feedback and inertial measurement. Advanced Robotics 20, 6, 707–736.Google ScholarCross Ref
11. Koditschek, D., and Buhler, M. 1991. Analysis of a Simplified Hopping Robot. Intl J. of Robotics Research 10, 6, 587. Google ScholarDigital Library
12. Kudoh, S., Komura, T., and Ikeuchi, K. 2006. Stepping motion for a humanlike character to maintain balance against large perturbations. In Proc. of Intl Conf. on Robotics and Automation, 2661–2666.Google Scholar
13. Kuo, A. 1999. Stabilization of Lateral Motion in Passive Dynamic Walking. Intl J. of Robotics Research 18, 9, 917.Google ScholarCross Ref
14. Laszlo, J. F., van de Panne, M., and Fiume, E. 1996. Limit cycle control and its application to the animation of balancing and walking. In Proceedings of ACM SIGGRAPH, 155–162. Google ScholarDigital Library
15. Miura, H., and Shimoyama, I. 1984. Dynamic Walk of a Biped. Intl J. of Robotics Research 3, 2, 60–74.Google ScholarCross Ref
16. Morimoto, J., Cheng, G., Atkeson, C. G., and Zeglin, G. 2004. A simple reinforcement learning algorithm for biped walking. In Proc. IEEE Int’l Conf. on Robotics and Automation.Google Scholar
17. Nakanishi, J., and Schaal, S. 2004. Feedback error learning and nonlinear adaptive control. Neural Networks 17, 1453–1465. Google ScholarDigital Library
18. Nakanishi, J., Morimoto, J., Endo, G., Cheng, G., Schaal, S., and Kawato, M. 2003. Learning from demonstration and adaptation of biped locomotion with dynamical movement primitives. In Workshop on Robot Learning by Demonstration, IEEE Int’l Conf. Intelligent Robots and Systems.Google Scholar
19. NaturalMotion, 2006. http://www.naturalmotion.com.Google Scholar
20. ODE. Open dynamics engine. http://www.ode.org.Google Scholar
21. Popovic, Z., and Witkin, A. 1999. Physically based motion transformation. In Proceedings of ACM SIGGRAPH, 11–20. Google ScholarDigital Library
22. Raibert, M. H., and Hodgins, J. K. 1991. Animation of dynamic legged locomotion. In Proc. SIGGRAPH ’91, 349–358. Google ScholarDigital Library
23. Raibert, M. H. 1986. Legged Robots That Balance. MIT Press. Google ScholarDigital Library
24. Sharon, D., and van de Panne, M. 2005. Synthesis of controllers for stylized planar bipedal walking. In International Conference on Robotics and Automation.Google Scholar
25. Smith, R. 1998. Intelligent Motion Control with an Artificial Cerebellum. PhD thesis, University of Auckland.Google Scholar
26. Sok, K. W., Kim, M., and Lee, J. 2007. Simulating biped behaviors from human motion data. ACM Trans. on Graphics (Proc. ACM SIGGRAPH). Google ScholarDigital Library
27. Taga, G., Yamaguchi, Y., and Shimizu, H. 1991. Self-organized control of bipedal locomotion by neural oscillators in unpredictable environment. Biological Cybernetics 65, 147–159.Google ScholarDigital Library
28. Takahashi, C. D., Scheidt, R. A., and Reinkensmeyer, D. J. 2001. Impedance Control and Internal Model Formation When Reaching in a Randomly Varying Dynamical Environment. J. Neurophysiology 86 (Aug).Google Scholar
29. Tedrake, R., Zhang, T. W., and Seung, H. S. 2004. Stochastic policy gradient reinforcement learning on a simple 3d biped. In IEEE Intl Conf. on Intelligent Robots and Systems.Google Scholar
30. Vakakis, A., and Burdick, J. 1990. Chaotic motions in the dynamics of a hopping robot. Proc. IEEE Intl Conf on Robotics and Automation, 1464–1469.Google Scholar
31. van de Panne, M., and Fiume, E. 1993. Sensor-actuator networks. In Proceedings of ACM SIGGRAPH, 335–342. Google ScholarDigital Library
32. van de Panne, M., Kim, R., and Fiume, E. 1994. Virtual wind-up toys for animation. In Graphics Interface, 208–215.Google Scholar
33. Vukobratovic, M., and Juricic, D. 1969. Contribution to the synthesis of biped gait. In IEEE Transactions on Biomedical Engineering, vol. 16. 1–6.Google ScholarCross Ref
34. Wooten, W. L. 1998. Simulation of leaping, tumbling, landing, and balancing humans. PhD thesis, Georgia Institute of Technology. Google ScholarDigital Library
35. Wrotek, P., Jenkins, O. C., and McGuire, M. 2006. Dynamo: dynamic, data-driven character control with adjustable balance. In sandbox ’06: Proc. of the 2006 ACM SIGGRAPH Symposium on Videogames, 61–70. Google ScholarDigital Library
36. Yin, K., Cline, M. B., and Pai, D. K. 2003. Motion perturbation based on simple neuromotor control models. In Proceedings of Pacific Graphics. Google ScholarDigital Library
37. Zordan, V. B., and Hodgins, J. K. 2002. Motion capture-driven simulations that hit and react. In Proc. ACM SIGGRAPH/EG Symp. on Computer animation, 89–96. Google ScholarDigital Library
38. Zordan, V., Majkowska, A., Chiu, B., and Fast, M. 2005. Dynamic response for motion capture animation. Proc. ACM SIGGRAPH 2005 24, 3, 697–701. Google ScholarDigital Library