
“Real-time 3D model acquisition”
Conference:
Type(s):
Title:
- Real-time 3D model acquisition
Presenter(s)/Author(s):
Abstract:
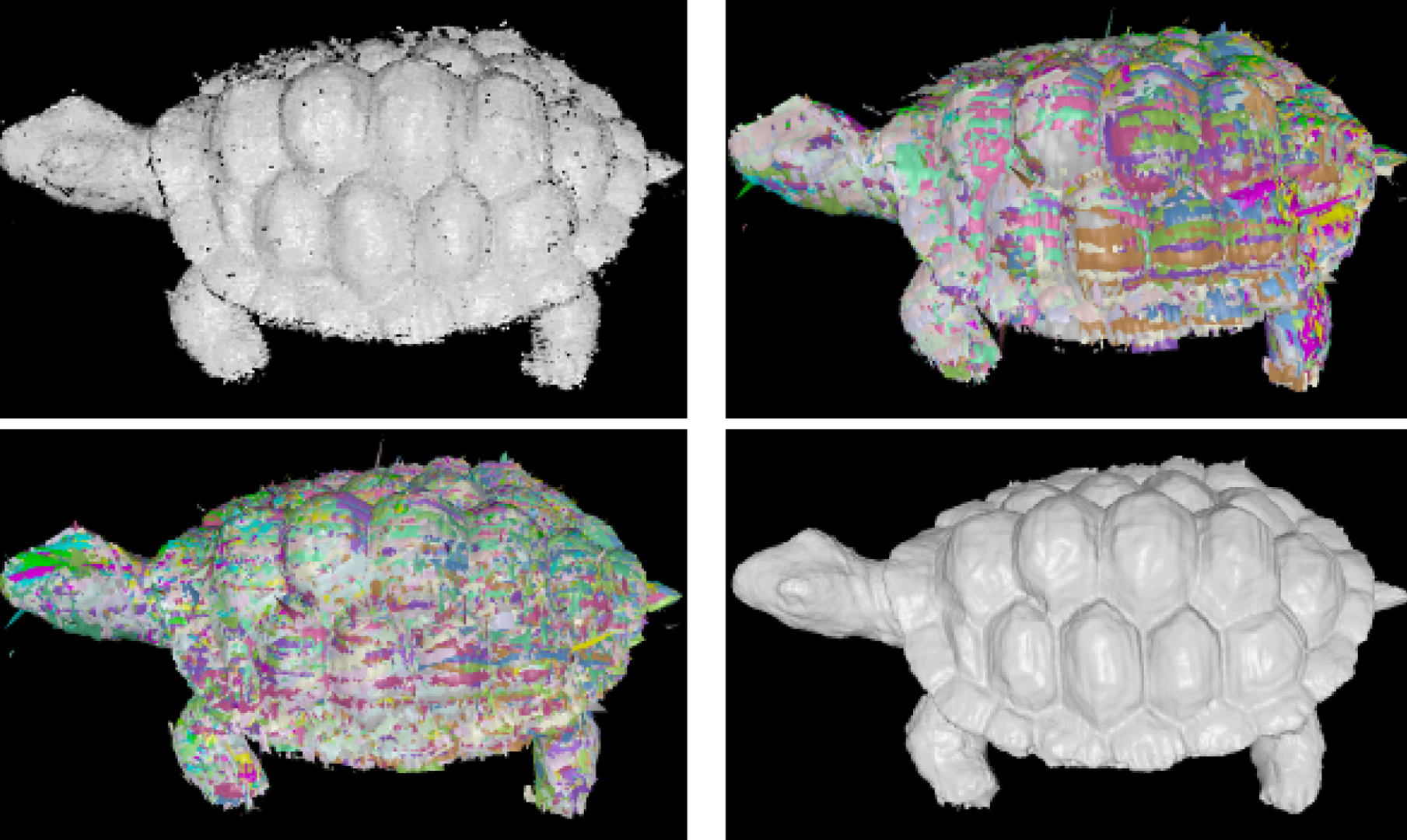
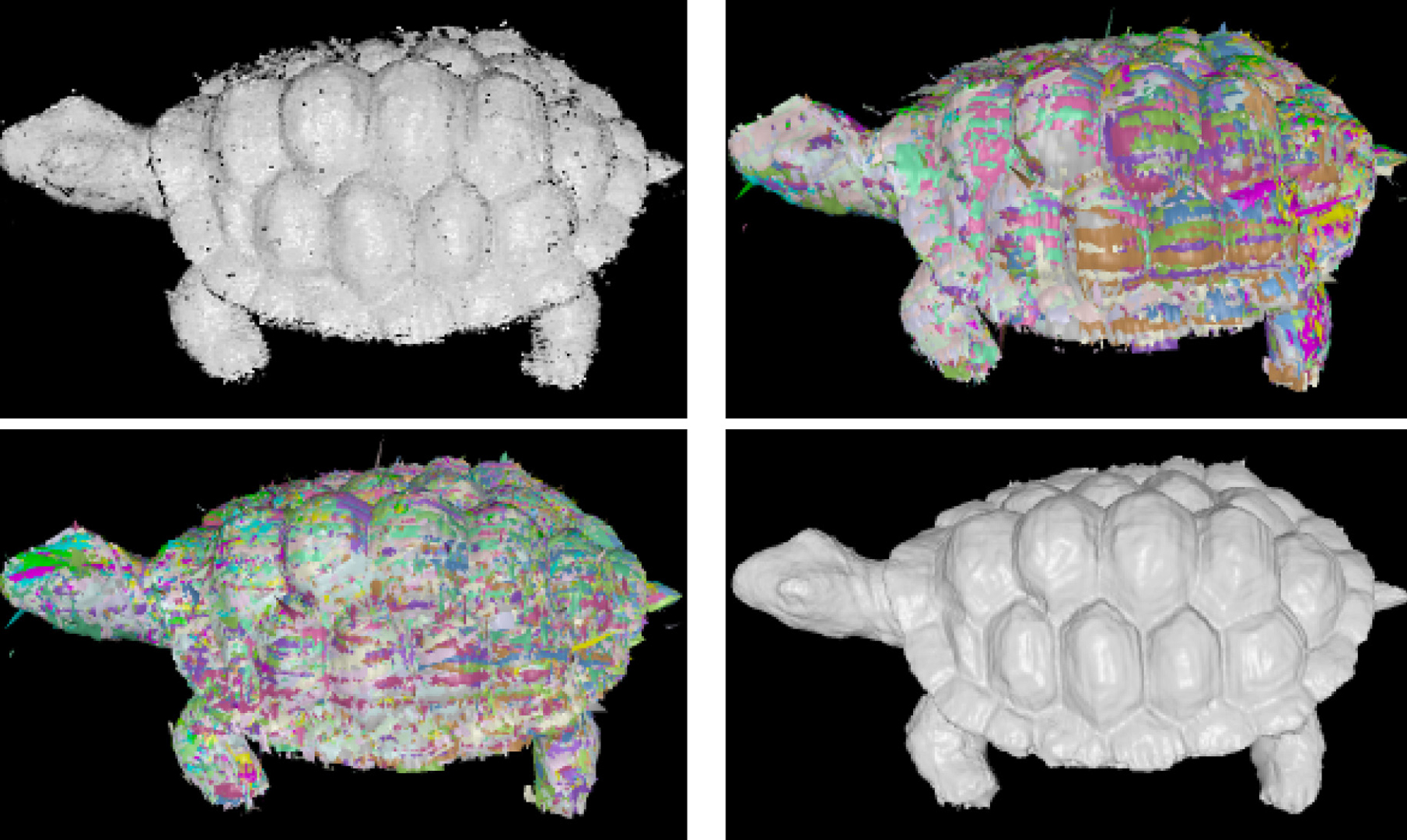
The digitization of the 3D shape of real objects is a rapidly expanding field, with applications in entertainment, design, and archaeology. We propose a new 3D model acquisition system that permits the user to rotate an object by hand and see a continuously-updated model as the object is scanned. This tight feedback loop allows the user to find and fill holes in the model in real time, and determine when the object has been completely covered. Our system is based on a 60 Hz. structured-light rangefinder, a real-time variant of ICP (iterative closest points) for alignment, and point-based merging and rendering algorithms. We demonstrate the ability of our prototype to scan objects faster and with greater ease than conventional model acquisition pipelines.
References:
1. ALLEN, B., CURLESS, B., AND POPOVIC, Z. 2002. “Human Body Deformation From Range Scans,” Proc. ACM SIGGRAPH 2002. Google Scholar
2. BESL, P. AND MCKAY, N. 1992. “A Method for Registration of 3-D Shapes,” Trans. PAMI, Vol. 14, No. 2. Google Scholar
3. BLAIS, G. AND LEVINE, M. 1995. “Registering Multiview Range Data to Create 3D Computer Objects,” Trans. PAMI, Vol. 17, No. 8. Google Scholar
4. BOYER, K. L. AND KAK, A. C. 1987. “Color-Encoded Structured Light for Rapid Active Ranging,” Trans. PAMI, Vol. 9, No. 1. Google Scholar
5. BREGLER, C., HERTZMANN, A., AND BIERMANN, H. 2000. “Recovering Non-Rigid 3D Shape from Image Streams,” Proc. CVPR 2000. Google Scholar
6. CHEN, C., HUNG, Y., AND CHENG, J. 1999. “RANSAC-Based DARCES: A New Approach to Fast Automatic Registration of Partially Overlapping Range Images,” Trans. PAMI, Vol. 21, No. 11. Google Scholar
7. CHEN, Y. AND MEDIONI, G. 1991. “Object Modeling by Registration of Multiple Range Images,” Proc. IEEE Conf. on Robotics and Automation 1991.Google Scholar
8. CLINE, H. E., LORENSEN, W. E., LUDKE, S., CRAWFORD, C. R., AND TEETER, B. C. 1998. “Two Algorithms for the Three-Dimensional Reconstruction of Tomograms,” Medical Physics, Vol. 15, No. 3.Google Scholar
9. COSTEIRA, J. AND KANADE, T. 1998. “A Multi-Body Factorization Method for Motion Analysis,” IJCV, Vol. 29, No. 3. Google Scholar
10. CURLESS, B. AND LEVOY, M. 1996. “A Volumetric Method for Building Complex Models from Range Images,” Proc. ACM SIGGRAPH 96. Google Scholar
11. DAVIS, J. AND CHEN, X. 2001. “A Laser Range Scanner Designed for Minimum Calibration Complexity,” Proc. 3DIM 2001.Google Scholar
12. GRUSS, A., TADA, S., AND KANADE, T. 1992. “A VLSI Smart Sensor for Fast Range Imaging,” Proc. IEEE Int. Conf. on Intelligent Robots and Systems 1992.Google Scholar
13. HALL-HOLT, O. AND RUSINKIEWICZ, S. 2001. “Stripe Boundary Codes for Real-Time Structured-Light Range Scanning of Moving Objects,” Proc. ICCV 2001.Google Scholar
14. JOHNSON, A. AND HEBERT, M. 1997. “Surface Registration by Matching Oriented Points,” Proc. 3DIM 1997. Google Scholar
15. KANADE, T., YOSHIDA, A., ODA, K., KANO, H., AND TANAKA, M. 1996. “A Stereo Machine for Video-rate Dense Depth Mapping and Its New Applications,” Proc. CVPR 1996. Google Scholar
16. LEVOY, M., PULLI, K., CURLESS, B., RUSINKIEWICZ, S., KOLLER, D., PEREIRA, L., GINZTON, M., ANDERSON, S., DAVIS, J., GINSBERG, J., SHADE, J., AND FULK, D. 2000. “The Digital Michelangelo Project: 3D Scanning of Large Statues,” Proc. ACM SIGGRAPH 2000. Google Scholar
17. MATSUMOTO, Y., TERASAKI, H., SUGIMOTO, K., AND ARAKAWA, T. 1997. “A Portable Three-Dimensional Digitizer,” Proc. 3DIM 1997. Google Scholar
18. MATUSIK, W., BUEHLER, C., RASKAR, R., GORTLER, S., AND MCMILLAN, L. 2000. “Image-Based Visual Hulls,” Proc. ACM SIGGRAPH 2000. Google Scholar
19. MAVER, J. AND BAJCSY, R. 1993. “Occlusions as a Guide for Planning the Next View,” Trans. PAMI, Vol. 15, No. 5. Google Scholar
20. MIYAZAKI, D., OOISHI, T., NISHIKAWA, T., SAGAWA, R., NISHINO, K. TOMOMATSU, T., TAKASE, Y., AND IKEUCHI, K. 2000. Proc. VSMM 2000.Google Scholar
21. NAYAR, S. K., WATANABE, M., AND NOGUCHI, M. 1996. “Real-Time Focus Range Sensor,” Trans. PAMI, Vol. 18, No. 12. Google Scholar
22. PENTLAND, A., DARRELL, T., TURK, M. AND HUANG, W. 1989. “A Simple, Real-Tie Range Camera,” Proc. CVPR 1989.Google Scholar
23. PFISTER, H., ZWICKER, M., VAN BAAR, J., AND GROSS, M. 2000. “Surfels: Surface Elements as Rendering Primitives,” Proc. ACM SIGGRAPH 2000. Google Scholar
24. PROESMANS, M. VAN GOOL, L., AND DEFOORT, F. 1998. “Reading Between the Lines — A Method for Extracting Dynamic 3D with Texture,” Proc. ICCV 1998. Google Scholar
25. PULLI, K. 1999. “Multiview Registration for Large Data Sets,” Proc. 3DIM 1999. Google Scholar
26. ROSSIGNAC, J. AND BORREL, P. 1993. “Multi-Resolution 3D Approximations for Rendering Complex Scenes,” Geometric Modeling in Computer Graphics.Google Scholar
27. RUSHMEIER, H., BERNARDINI, F., MITTLEMAN, J. AND TAUBIN, G. 1998. “Acquiring Input for Rendering at Appropriate Levels of Detail: Digitizing a Pietà,” Proc. Eurographics Rendering Workshop 1998.Google Scholar
28. RUSINKIEWICZ, S. AND LEVOY, M. 2000. “QSplat: A Multiresolution Point Rendering System for Large Meshes,” Proc. ACM SIGGRAPH 2000. Google Scholar
29. RUSINKIEWICZ, S. 2001. “Real-Time Acquisition and Rendering of Large 3D Models,” Ph.D. Dissertation, Stanford University. Google Scholar
30. RUSINKIEWICZ, S. AND LEVOY, M. 2001. “Efficient Variants of the ICP Algorithm,” Proc. 3DIM 2001.Google Scholar
31. SOUCY, M. AND LAURENDEAU, D. 1992. “Multi-Resolution Surface Modeling from Multiple Range Views,” Proc. CVPR 1992.Google Scholar
32. STAMOS, I. AND ALLEN, P. 1998. “Interactive Sensor Planning,” Proc. CVPR 1998. Google Scholar
33. TURK, G. AND LEVOY, M. 1994. “Zippered Polygon Meshes from Range Images,” Proc. ACM SIGGRAPH 94. Google Scholar