
“Pseudo-Softness Evaluation in Grasping a Virtual Object with a Bare Hand” by Sato, Suzuki, Ebihara, Kato and Ishigaki
Conference:
Type(s):
Entry Number: 27
Title:
- Pseudo-Softness Evaluation in Grasping a Virtual Object with a Bare Hand
Presenter(s)/Author(s):
Abstract:
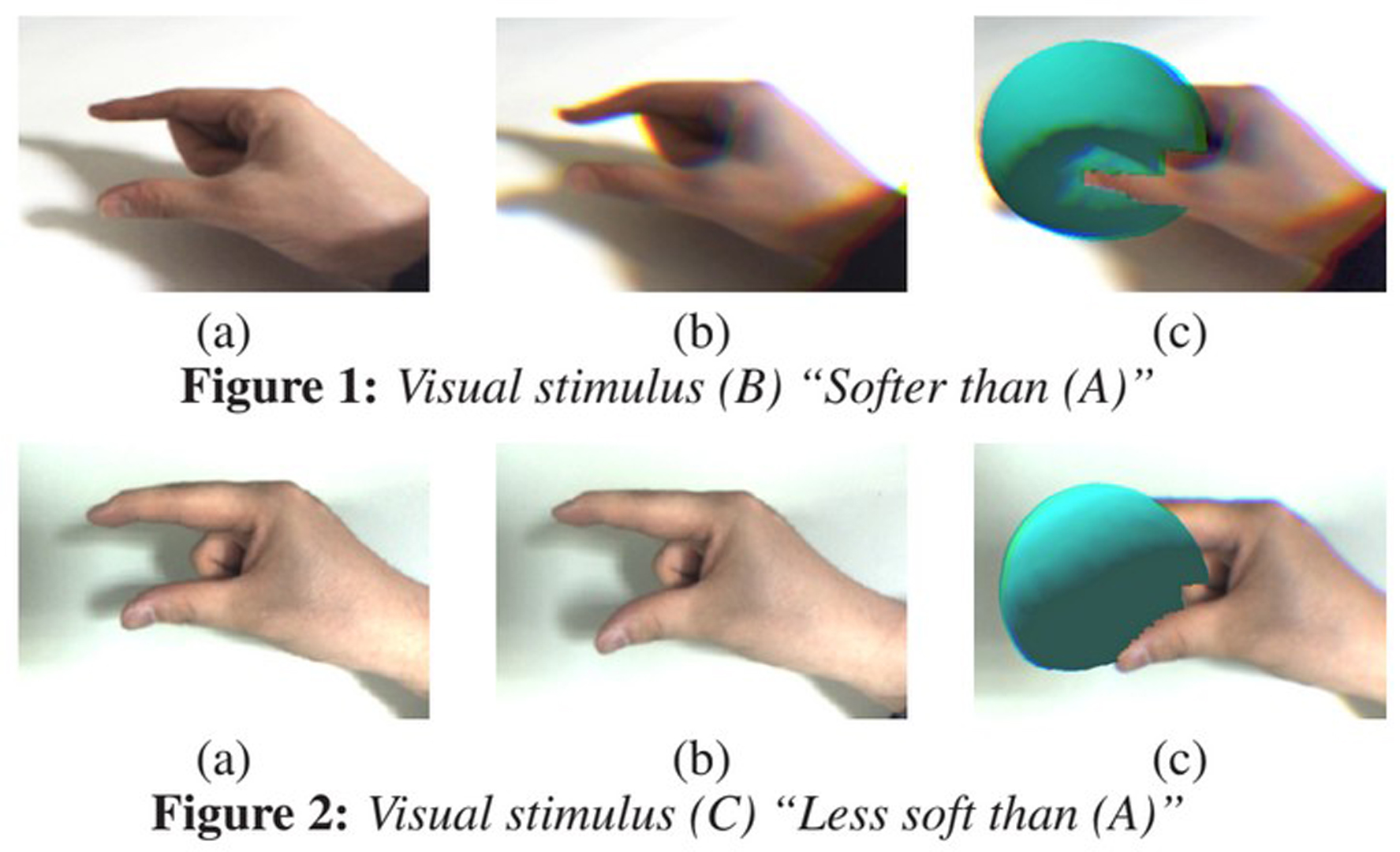
Bare hand interaction with a virtual object reduces uncomfortableness with devices mounted on a user’s hand. There are some studies on the bare hand interaction[Benko et al. 2012], however a virtual object is supposed to be a hard object or a user touches a physical object during the bare hand interaction. We focus on grasping a virtual object without using any physical object. Grasping is one of the basic movements in manipulating an object and is more difficult than simple movements like touching an object. Because of the bare hand interaction with no physical object, there is no haptic device on a user’s hand and so there is no physical feedback to the user. Our challenge is to provide a user with pseudo-softness while grasping a virtual object with a bare hand. We have been developing an AR system that makes it possible for a user to grasp a virtual object with a bare hand[Suzuki et al. 2014]. Using this AR system, we propose visual stimuli that correspond with the user’s hand movements, to manipulate the pseudo-softness of a virtual object. Evaluation results show that with the visual stimuli a user feels pseudo-softness while grasping a virtual object with a bare hand.