
“Project GROPE-Haptic displays for scientific visualization” by Brooks Jr., Ouh-Young, Batter and Kilpatrick
Conference:
Type(s):
Title:
- Project GROPE-Haptic displays for scientific visualization
Session/Category Title: Interaction
Presenter(s)/Author(s):
Moderator(s):
Abstract:
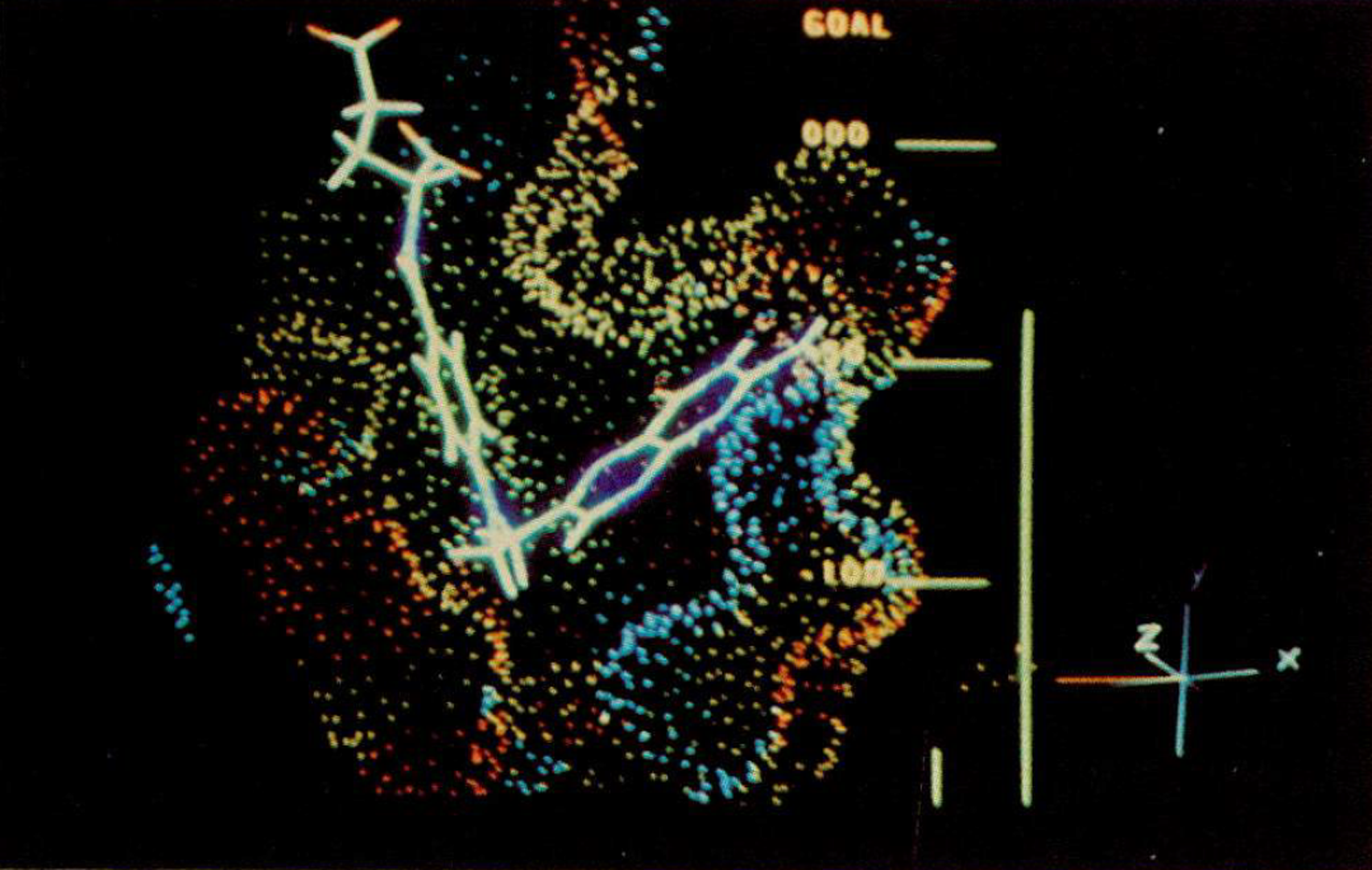
We began in 1967 a project to develop a haptic+display for 6-D force fields of interacting protein molecules. We approached it in four stages: a 2-D system, a 3-D system tested with a simple task, a 6-D system tested with a simple task, and a full 6-D molecular docking system, our initial goal. This paper summarizes the entire project—the four systems, the evaluation experiments, the results, and our observations. The molecular docking system results are new.Our principal conclusions are:• Haptic display as an augmentation to visual display can improve perception and understanding both of force fields and of world models populated with impenetrable objects.• Whereas man-machine systems can outperform computer-only systems by orders of magnitude on some problems, haptic-augmented interactive systems seem to give about a two-fold performance improvement over purely graphical interactive systems. Better technology may give somewhat more, but a ten-fold improvement does not seem to be in the cards.• Chemists using GROPE-III can readily reproduce the true docking positions for drugs whose docking is known (but not to them) and can find very good docks for drugs whose true docks are unknown. The present tool promises to yield new chemistry research results; it is being actively used by research chemists.• The most valuable result from using GROPE-III for drug docking is probably the radically improved situation awareness that serious users report. Chemists say they have a new understanding of the details of the receptor site and its force fields, and of why a particular drug docks well or poorly.• We see various scientific/education applications for haptic displays but believe entertainment, not scientific visualization, will drive and pace the technology.• The hardware-software system technology we have used is barely adequate, and our experience sets priorities for future development.• Some unexpected perceptual phenomena were observed. All of these worked for us, not against us.
References:
1. Batter, J.J. and Brooks, F.P., Jr. GROPE-I: A computer display to the sense of feel. Information Processing, Proc. 1FIP Congress 71,759-763.]]
2. Bejczy, A.K. Sensors,controls, and man-machine interface for advanced teleoperation. Science 208 (1980), 1327-1335,.]]
3. Brooks, F.P., Jr. The computer scientist as toolsmith: Studies in interactive computer graphics. In Information Processing 77, 625- 634. B. Gilchrist, ed. North-Holland: Amsterdam, 1977.]]
4. Brooks, F.P., Jr. Grasping reality through illusion: Interactive graphics serving science. Invited keynote address. Published in CHI’68 Proceedings, May 1988. Addison-Wesley: Reading, MA. 1- 11.]]
5. Capowski, J.J. Remote Manipulators as a Computer Input Device. M.S. Thesis, Computer Science Department, University of North Carolina, Chapel Hill, 1971.]]
6. Connolly, M.L. Solvent-accessible surfaces of proteins and nucleic acids. Science 221 (August 1983), 709-713.]]
7. Deyo, R., Briggs, J., and Doenges, P. Getting graphics in gear. Proceedings of SIGGRAPH’86 (Dallas, Texas, August 18-22, 1986). In Computer Graphics 22, 4 (August 1986), 317-326.]]
8. Goertz, R.C. et al. The ANL Model 3 master slave manipulators-Its design and use in a cave. Proc. of the Ninth Conference on Hot Laboratories and Equipment, Washington, D.C., United States Atomic Energy Commission, 1961.]]
9. Gregory, R.L. Eye and Brain. 2nded. McGraw- Hill: New York, 1973.]]
10. Hill, J.W. and Salisbury, J.K., Jr. Two measures of performance in a peg-in-hole manipulation task with force feedback. Paper presented at Thirteenth Annual Conference on Manual Control, MIT (June 15-17, 1977).]]
11. Hill, J.W. and Salisbury, J.K., Jr. Study to design and develop remote manipulator system. Quarterly Reports 5, 6 (January 1978). Stanford Research Institute, Menlo Park, CA.]]
12. Hogan, N. Stable execution of contact tasks using impedance control. Proceedings of lEEE Robotics and Automation Conference, Raleigh, NC (t 987), 1047-1054.]]
13. Kilpatrick, P.J. The Use of Kinesthetic Supplement in an Interactive System. Ph.D dissertation, Computer Science Department, University of North Carolina at Chapel Hill, 1976.]]
14. Kuyper, L. Receptor-based design of Dihydrofolate Reductase inhibitors: Comparison of crystallographically determined enzyme binding with enzyme affinity in a series of carboxy-substituted Trimethoprim analogues.” J. Med. Chem.. 1122, 25 (1982), 1120- 1124.]]
15. McCormick, B.H., DeFanti, T.A., Brown, M.D., eds. Visualization in scientific computing. Computer Graphics 21, 6 (Nov. 1987), and SIGGRAPH Video Review, Issues 28-29 (Nov. 1987).]]
16. Minsky, M., Ouh-young, M., Steele, O., Brooks, F. P., Jr., Behensky, M. Feeling and seeing: Issues in force display. Proc. of 1990 Symposium on Interactive 3D Graphics, Snowbird, Utah, March 1990. Published in Computer Graphics 24, 2 (March 1990), 235-244.]]
17. Mowbray, G. H. and Gebhard, J. W. Man’s senses as information channels. In H.W. Sinaiko, ed. Selected Papers on Human Factors in the Design and Use of Control Systems. Dover: New York, 1961. p. 118.]]
18. Ouh-Young, M., Pique, M., Hughes,L, Srinivasan, N., Brooks, F.P., Jr. Using a manipulator for force display in molecular docking. Proc. IEEE Robotics and Automation Conference 3 (Philadelphia, April 1988), 1824-1829.]]
19. Ouh-Young, M., Beard, D.V., Brooks, F.P., Jr. Force display performs better than visual display in a simple 6-D docking task. Proc. IEEE International Conference on Robotics and Automation (Arizona, May 1989), 1462-1466.]]
20. Ouh-Young, M. Force Display in Molecular Docking. Ph.D. Dissertation, Computer Science Department, University of North Carolina, Chapel Hill, 1990.]]
21. Pattabiraman, N. et al. Computer graphics and drug design: Real time docking, energy calculation and minimization. Journal of Computational Chemistry 6 (1985), 432-436.]]
22. Smith, M.J. Tactile Interface for Three-Dimensional Computer-Simulated Environments: Experimentation and the Design of a Brake-Motor Device. M.S. Thesis, Mechanical Engineering Department., Massachusetts Institute of Technology, 1988.]]
23. Stark, L.W., Kim, W.S., Tendick, F. Cooperative control in telerobotics. Proc. IEEE International Conference on Robotics and Automation (Philadelphia, April 1988), 593-595.]]
24. Steelman, H.S. The GROPE-I System: An Analysis of Friction and Backlash Problems. M.S. Thesis, Computer Science Department, University of North Carolina, Chapel Hill, 1968.]]
25. Sutherland, I.E. The ultimate display. Information Processing 1965, Proc. IFIP Congress 65, 506-508.]]
26. Turk, G. Interactive Collision Detection for Molecular Graphics. M.S. thesis, Computer Science Department, University of North Carolina at Chapel Hill, 1989.]]
27. Weber, C.O. The properties of space and time in kinaesthetic fields of force. Am. J. of Psychology 38, 4 (1927), 597-606.]]
28. Weber, C.O. The properties of space and time in kinaesthetic fields offorce. Am.J. of Psychology 41, 1 (1929), 95-105.]]
29. Webster’s New International Dictionary. 2nd ed. Merriam: Springfield, MA.]]