
“Pre-stabilization for Rigid Body Articulation with Contact and Collision” by Petterson, Teran and Fedkiw

Conference:
Type(s):
Talk Type(s):
Title:
- Pre-stabilization for Rigid Body Articulation with Contact and Collision
Session/Category Title:
- Collisions
Presenter(s)/Author(s):
Moderator(s):
Abstract:
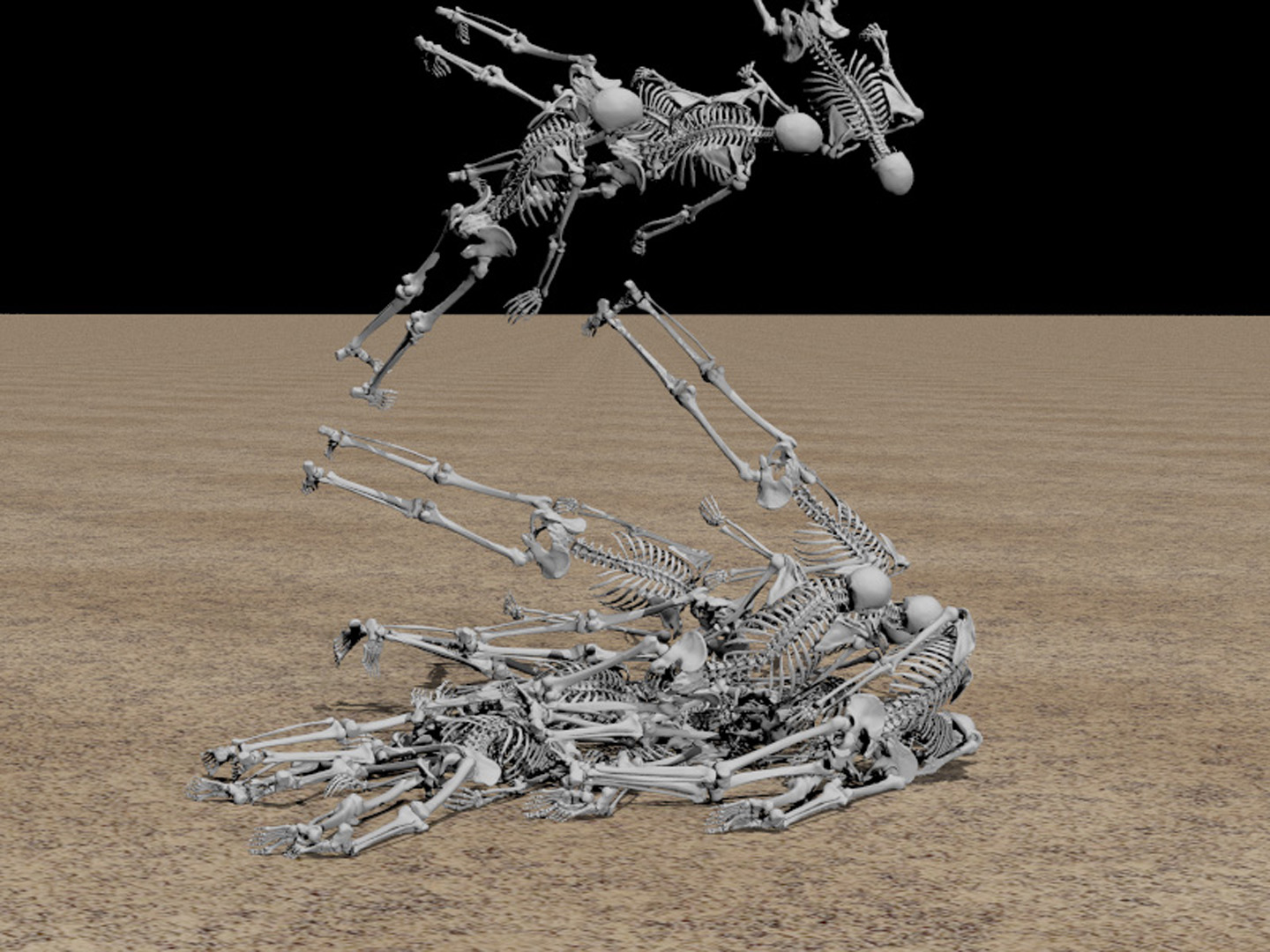
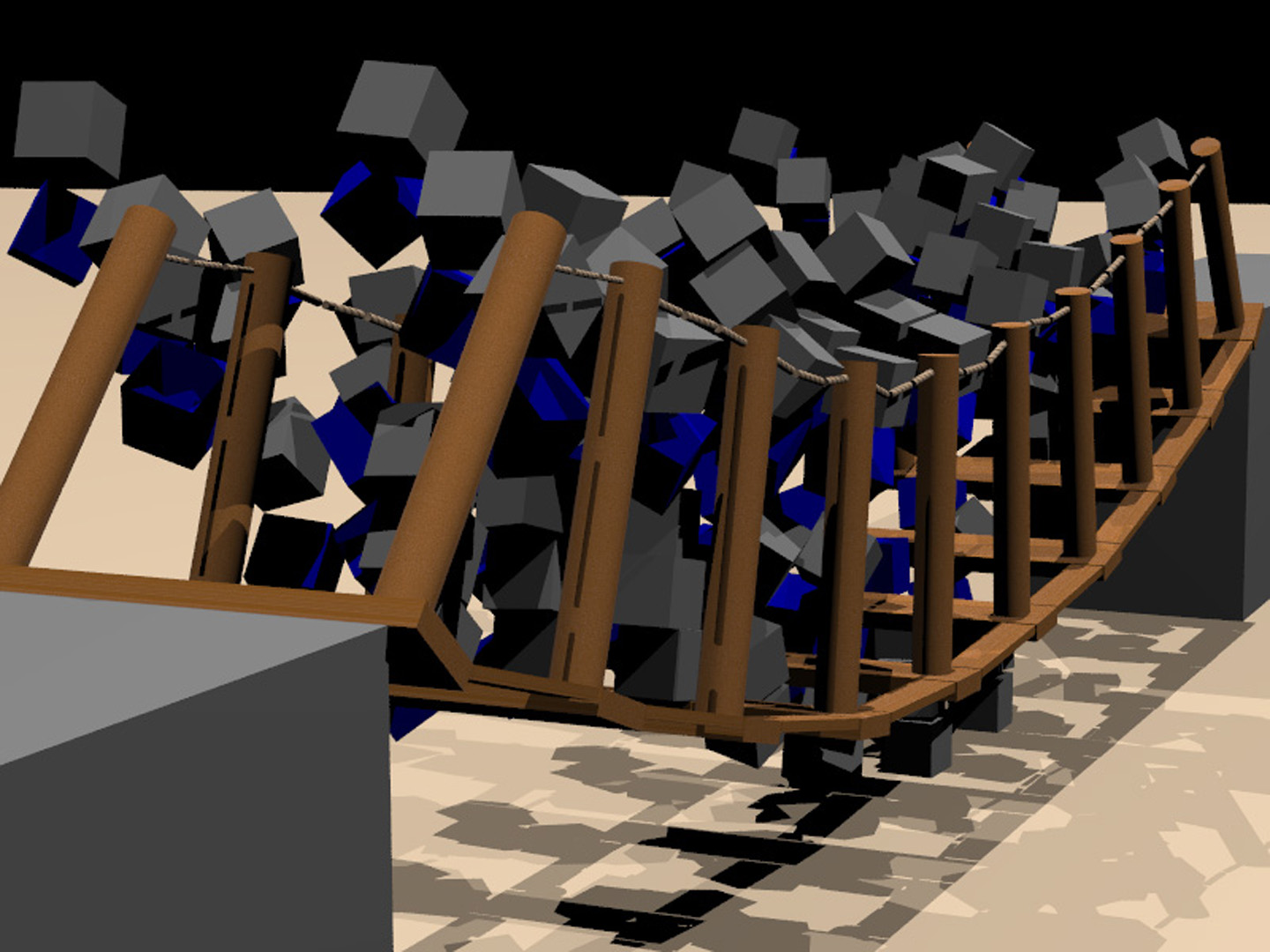
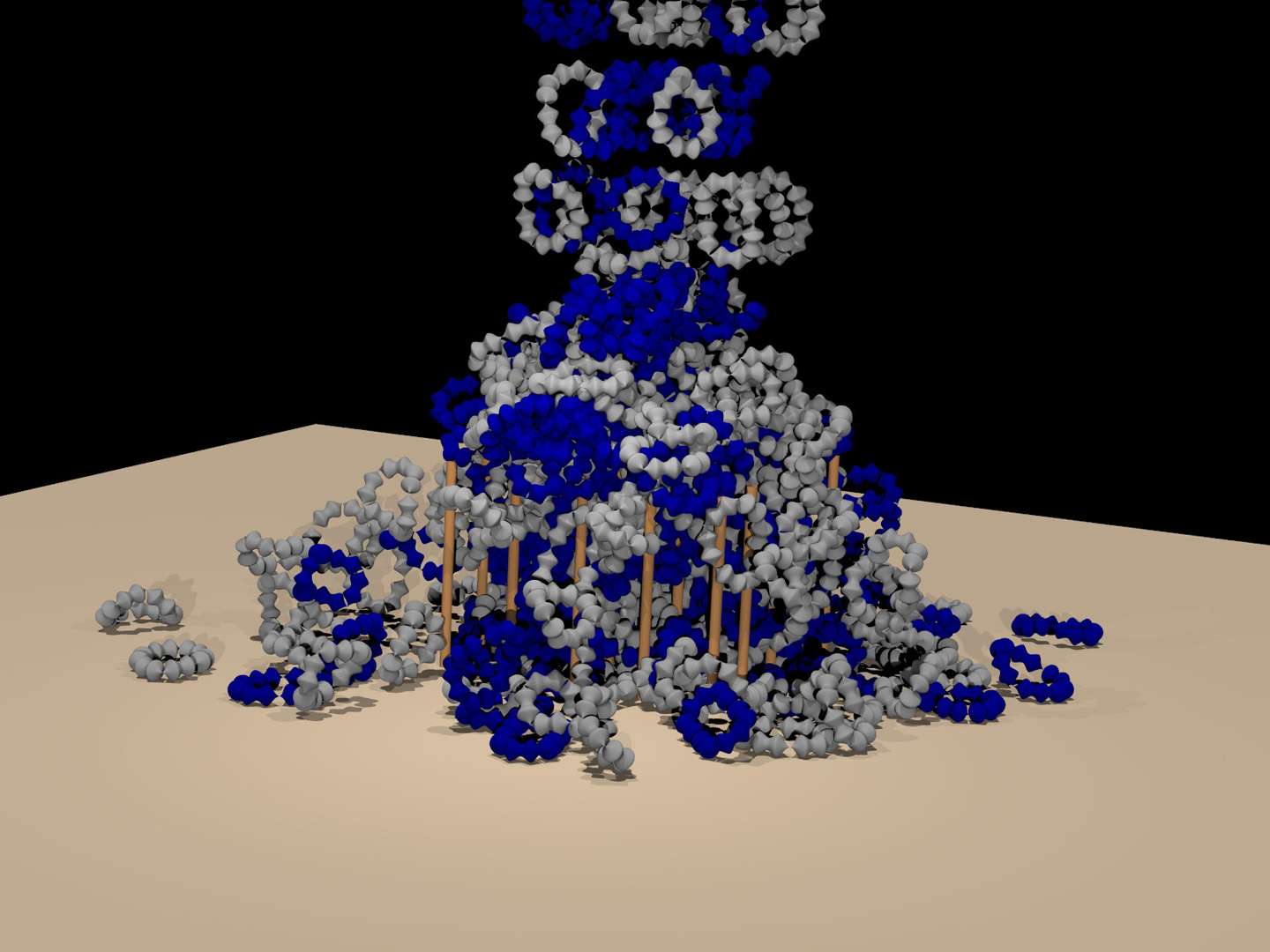
We propose a novel approach for dynamically simulating articulated rigid bodies undergoing frequent and unpredictable contact and collision. Many practitioners solve these types of problems using reduced coordinate (or generalized coordinate) formulations that parameterize the degrees of freedom in a manner consistent with the constraints of articulation, effectively reducing the overall degrees of freedom, eliminating those that could violate the constraints. However, consistency conditions are required to ensure that closed loops are actually closed adding a nonlocal constraint to the system. Moreover, unpredictable contact and collision can pose serious difficulties. We have found it easier to design algorithms that treat closed loops and frequent contact and collision in maximal coordinates, and propose a novel maximal coordinates approach that builds on the previous work of [Guendelman et al. 2003]. Our approach works with any black box method for specifying valid joint constraints, and no special considerations are re- quired for arbitrary closed loops and/or branching. Moreover, our technique is linear both in the number of bodies and in the number of auxiliary contact and collision constraints, unlike many other methods that are linear in the number of bodies but not in the number of auxiliary constraints.
References:
Guendelman, E., Bridson, R., And Fedkiw, R. 2003. Nonconvex rigid bodies with stacking. ACM Trans. Graph. (SIGGRAPH Proc.) 22, 3, 871–878.