“Pathfinder Vision: Tele-operation Robot Interface for Supporting Future Prediction Using Stored Past Images” by Maeda and Sugimoto

Conference:
Type(s):
Title:
- Pathfinder Vision: Tele-operation Robot Interface for Supporting Future Prediction Using Stored Past Images
Presenter(s)/Author(s):
Entry Number:
- 76
Abstract:
Manual operation of the robots is an important approach for critical missions taking places in complex environments, and requires educated operators for best performance.
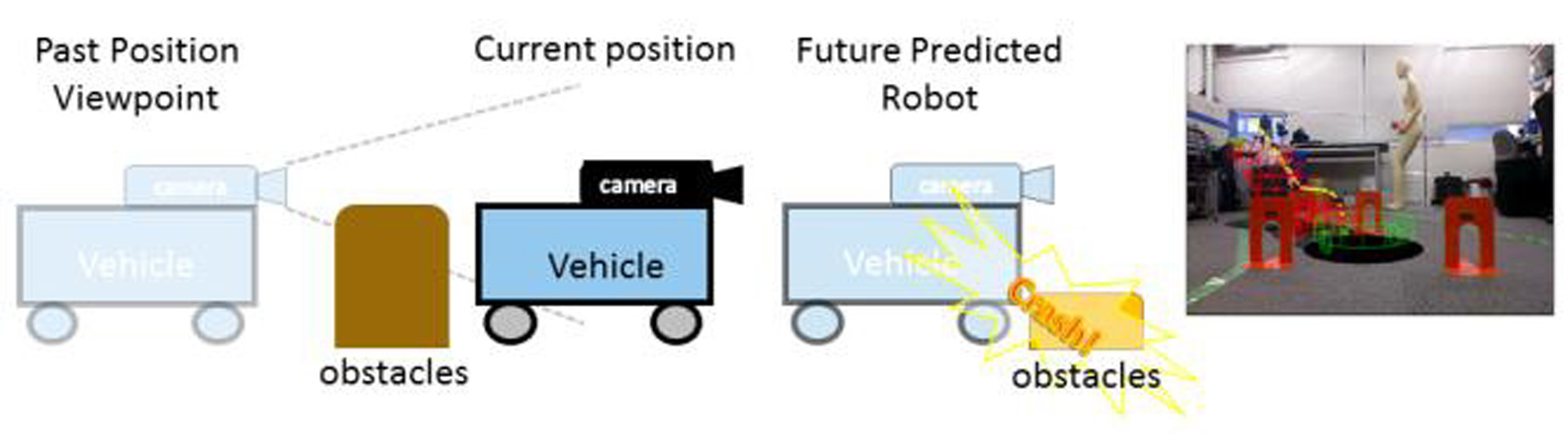
There are many challenges to improve manual operability of telerobots. Time Follower’s Vision provides images of virtual third person view by recording camera images [Sugimoto et al. 2005]. A popular interface is a car parking assist system with rear view camera [TOYOTA]. This assistance system is able to show future models of the control targets. However, these assistance system is not enough to predict correct near future situation due to consider about 3D geometry of the environments around the targets and consider into physical interference. Therefore, it is still dependent on the operator’s prior experience to predict the near-future event that may or may not result from the current course of vehicle movement, which makes it hard to set the proper route for the vehicle.
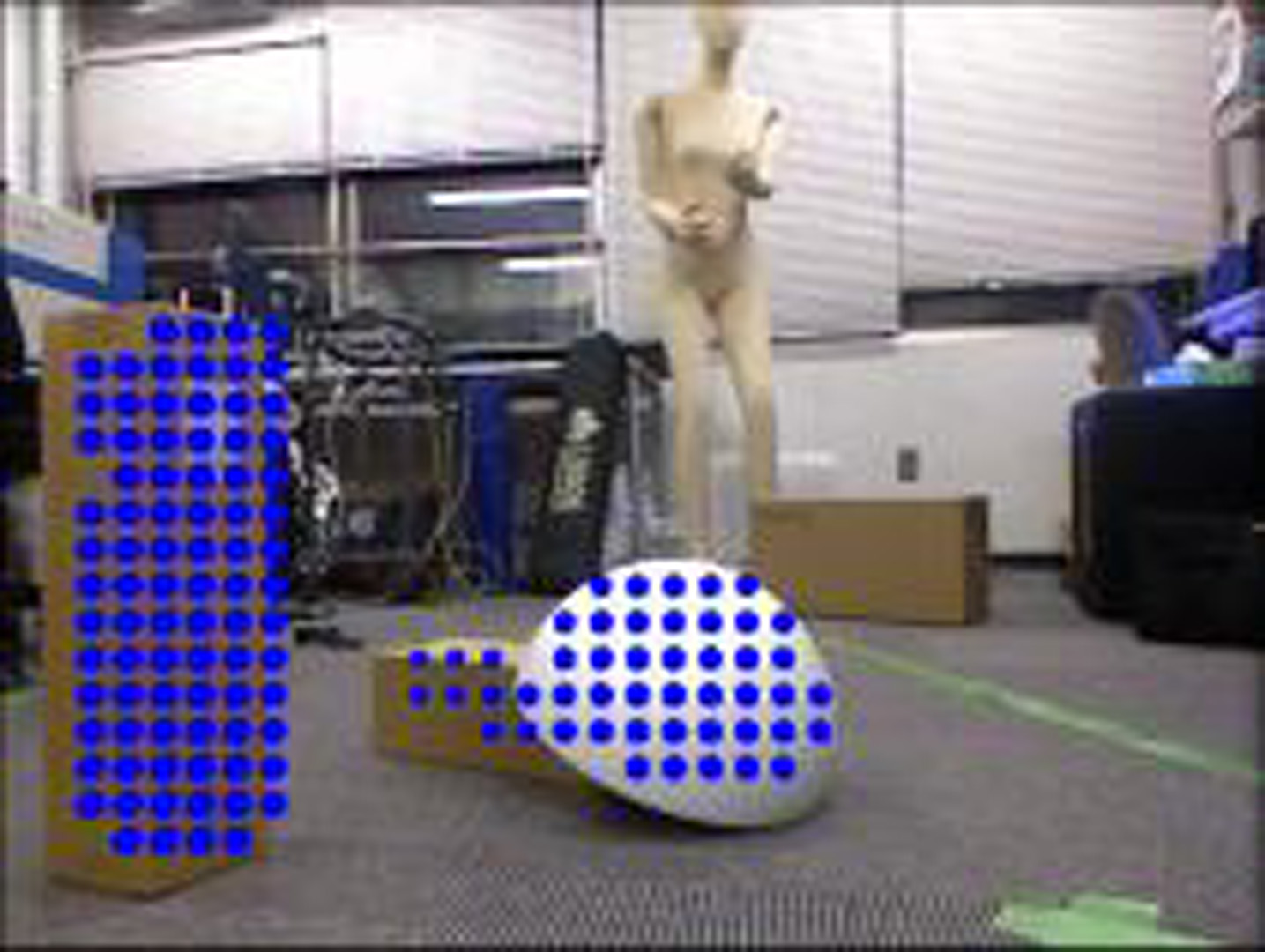
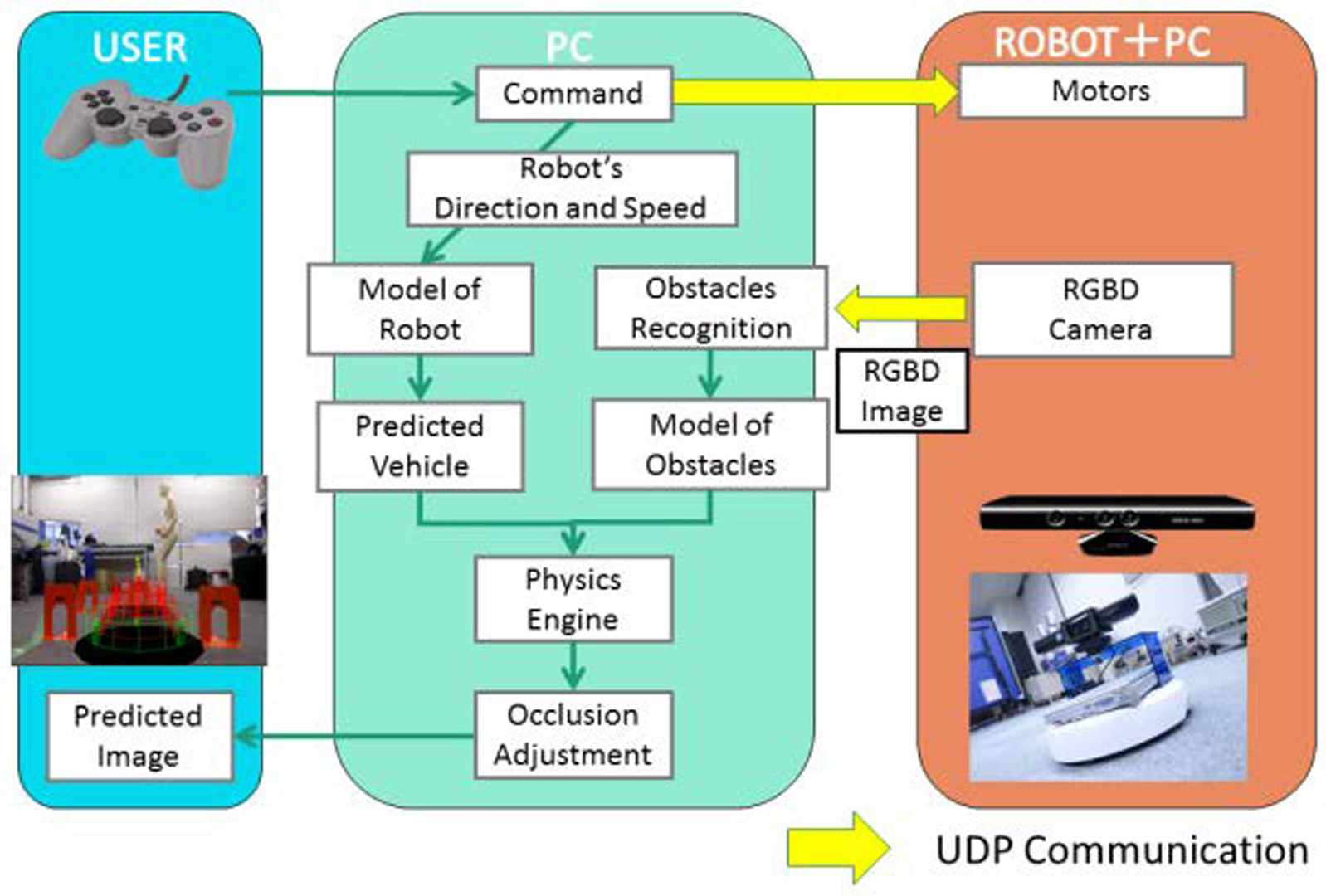
We propose an informative interface that supports the operator to become cognizant of near-future event by generating and presenting images depicting the predicted events in consideration of the physical interferences.
References:
- Sugimoto, M., Kagotani, G., Nii, H., Shiroma, N., Inami, M., and Matsuno, F. 2005. Time Follower’s Vision: a Teleoperation In Interface with Past Images. IEEE Computer Graphics and Applications, Vol. 25, No. 1, 54–63.
- TOYOTA. Back guide monitor system. http://www.toyota-global.com/innovation/safety\_technology/safety\_technology/parking/.
Additional Images:
-

- 2014 Poster: Maeda_Pathfinder Vision: Tele-operation Robot Interface for Supporting Future Prediction Using Stored Past Images