
“Parametric keyframe interpolation incorporating kinetic adjustment and phrasing control” by Badler and Steketee
Conference:
Type(s):
Title:
- Parametric keyframe interpolation incorporating kinetic adjustment and phrasing control
Presenter(s)/Author(s):
Abstract:
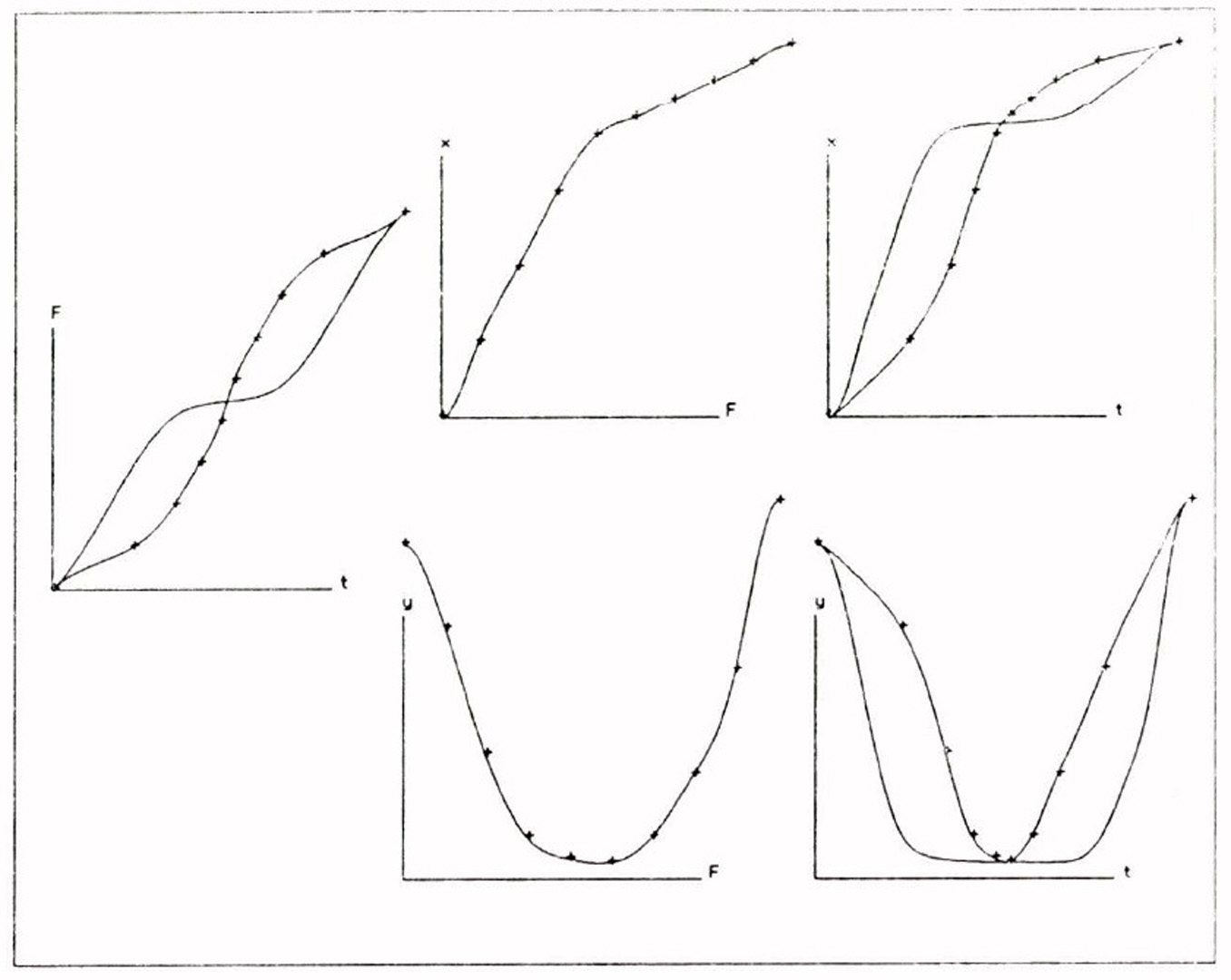
Parametric keyframing is a popular animation technique where values for parameters which control the position, orientation, size, and shape of modeled objects are determined at key times, then interpolated for smooth animation. Typically the parameter values defined by the keyframes are interpolated by spline techniques with the result that the parameter change kinetics are implicitly defined by the given keyframe times and data points. Existing interpolation systems for animation are examined and found to lack certain desirable features such as continuity of acceleration or convenient kinetic control. The requirements of interpolation for animation are analyzed in order to determine the characteristics of a satisfactory system. A new interpolation system is developed and implemented which incorporates second-derivative continuity (continuity of acceleration), local control, convenient kinetic control, and joining and phrasing of successive motions. Phrasing control includes the ability to parametrically control the degree and extent of smooth motion flow between separately defined motions.
References:
1. Badler, N. I. and S. W. Smoliar, “Digital Representations of Human Movement,= AC=====MM ~ Surveys 11(i), March 1979, pp. 19=;38.
2. Badler, N. I., J. Korein, J. U. Korein, G. M. Radaek and L. Brotman, “TEMPUS: A System for the Design and Simulation of Human Figures in a T~k-Oriented En~ironment,” Proc. of the First Annual Workshop o_nn Robotics and Expert ~, Instrument Society of America, June 1985.
3. Badler, N. I., =Design of a Human Movement Representation Incorporating Dynamics,” Technical Report, Department of Computer and Information Science, University of Pennsylvania, 1984.
4. Barsky, B. and J. Beatty, “Local Control of Bias and Tension in Beta-splines,= Computer_ ~ 17(3), July 1983, pp. 193-218.
5. Barsky, B. and T. DeRose, =The Beta2-spline: A Special Case of the Beta-Spline Curve and Surface Representation,= Report No. UCB/CSD 83/152, Computer Science Division, University of California, Berkeley, CA, November 1983.
6. Burtnyk, N. and M. Wein, “Interactive Skeleton Techniques for Enhancing Motion Dynamics in Keyframe Animation,= Communications of the ACM 19(10}, October 1976, pp. 564-569.
7. Catmull, E., =A System For Computer Generated Movies,” Proc. ACM Annual Conf. 1972, pp. 422-431.
8. Catmull, E. “The Problems of Computer-Assisted Animation,= Computer ~ 12(3), August 1978, p. 348-353.
9. deBoor, C, A Practical Guide to Splines, Springer-Verlag, New York, 1978.
10. Fortin, D., J. F. Lamy, and D. Thalmann, “A Multiple Track Animator System for Motion Synchronization,” Proc. ACM SIGGRAPH/SIGART Interdisciplinary Workshop on Motion: Representation and Perception, Toronto, Canada, April 1983, pp. 180-186.
11. Kochanek, D. and R. Bartels, “Interpolating Splines with Local Tension, Continuity, and Bias Control,” Computer 18(3), July 1984, pp. 33-41.
12. Loomis, J., H. Poizner, U. Bellugi, A. Blakemore, and J. Hollerbach, “Computer Graphic Modeling of American Sign Language,” Com~ ~ 17(3), July 1983, pp. 105-114.
13. Mezei, L., and A. givian, =ARTA, Aa Interactive Animation System,~ Proc. IFIP Congress 1971, North Holland Pub., pp. 429=434.
14. Parke, F. “Parameterized Models for Facial Animation,m IEEE an__.dd Applications 2{9), Nov. 1982, pp. 61-68.
15. Reeves, W. “Inbetweening For Computer Animation Utilizing Moving Point Constraints,” ~ ~ 18(3}, August 1981, pp. 263-269.
16. Reynolds, C., “Computer Animation with Scripts and Actors,” Com~ Graphics 16(3), July 1982, pp. 289-296.
17. Shelley, K. and D. Greenberg, “Path Specification and Path Coherence,” Computer ~ 16(3), July 1982, pp. 157-166.
18. Spegel, M., “Programming of Mechanism Motion,= Technical Report CRL-43, Div. of Applied Science, New York University, New York, 1975.
19. Steketee, S. N,, “Interpolation for Animation Incorporating Positional and Kinetic Adjustment,” MSE Thes/s, Department of Computer and information Science, University of Pennsylvania, 1984.
20. Sturman, D. “interactive Keyframe Animation of 3-D Articulated Motion,” Proc. Graphics Interface ’84, Ottawa, Ontario, May 1984, pp. 35-40.
21. Websterb Third New International Dictionary/, G. & C. Merriam Co., Springfield, MA, 1971.
22. Wilhelms, J., “Graphical Simulation of the Motion of Articulated Bodies such as Humans and Robots, with Particular Emphasis on the Use of Dynamic Analysis,= PhD Dissertation, Department of Computer Science, University of California, Berkeley, 1085.