
“Optimal feedback control for character animation using an abstract model” by Ye and Liu
Conference:
Type(s):
Title:
- Optimal feedback control for character animation using an abstract model
Presenter(s)/Author(s):
Abstract:
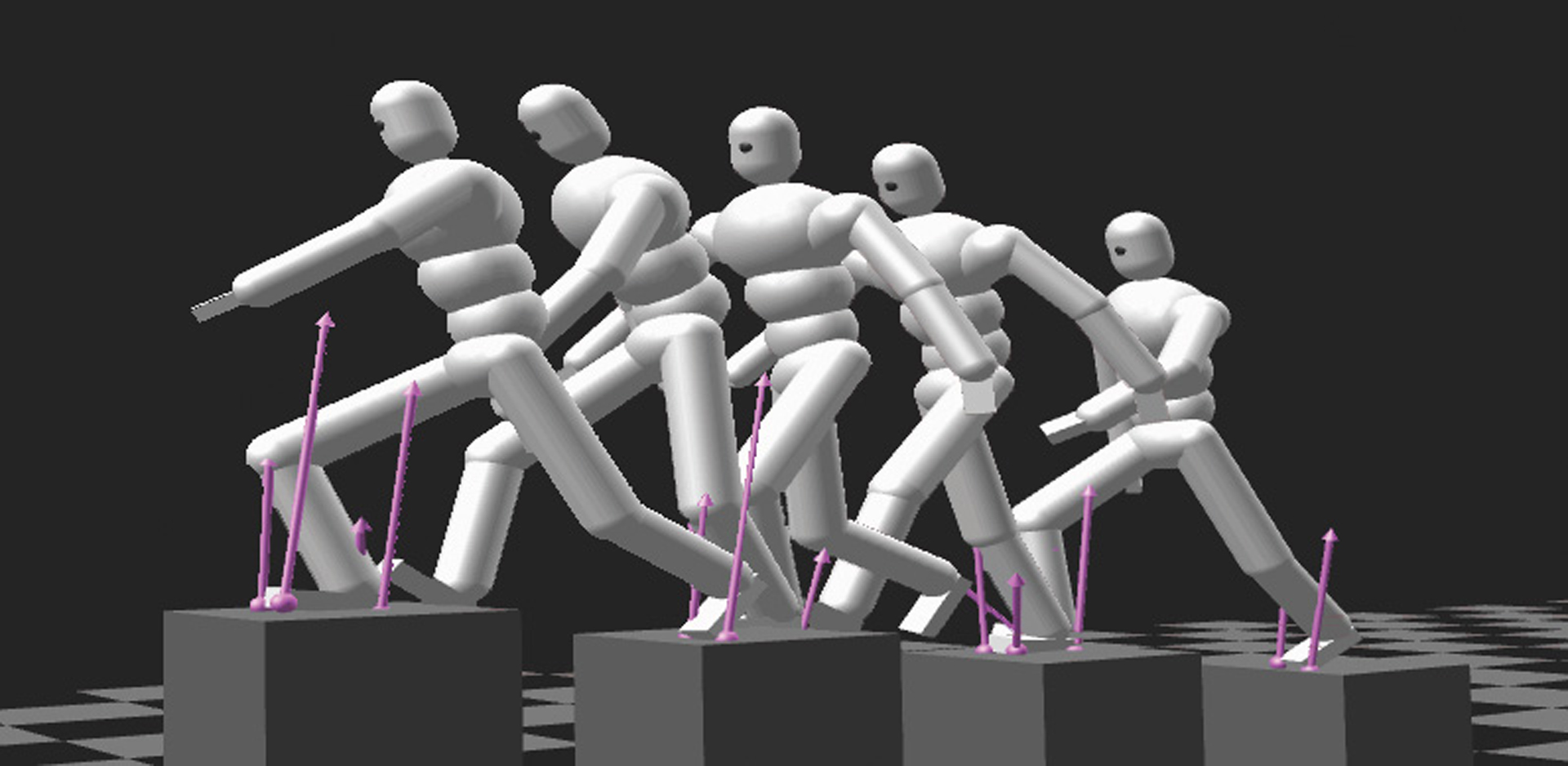
Real-time adaptation of a motion capture sequence to virtual environments with physical perturbations requires robust control strategies. This paper describes an optimal feedback controller for motion tracking that allows for on-the-fly re-planning of long-term goals and adjustments in the final completion time. We first solve an offline optimal trajectory problem for an abstract dynamic model that captures the essential relation between contact forces and momenta. A feedback control policy is then derived and used to simulate the abstract model online. Simulation results become dynamic constraints for online reconstruction of full-body motion from a reference. We applied our controller to a wide range of motions including walking, long stepping, and a squat exercise. Results show that our controllers are robust to large perturbations and changes in the environment.
References:
1. Abe, Y., and Popović, J. 2006. Interactive animation of dynamic manipulation. In Eurographics/SIGGRAPH Symposium on Computer Animation. Google ScholarDigital Library
2. Abe, Y., Liu, C. K., and Popović, Z. 2004. Momentum-based parameterization of dynamic character motion. In Eurographics/SIGGRAPH Symposium on Computer Animation, 173–182. Google ScholarDigital Library
3. Abe, Y., da Silva, M., and Popović, J. 2007. Multiobjective control with frictional contacts. In ACM SIGGRAPH/Eurographics symposium on Computer animation, 249–258. Google ScholarDigital Library
4. Alexander, R. 1995. Simple models of human movement. Applied Mechanics Reviews 48, 8.Google ScholarCross Ref
5. Allen, B. F., Chu, D., Shapiro, A., and Faloutsos, P. 2007. On the beat!: timing and tension for dynamic characters. In Symposium on Computer Animation, 239–247. Google ScholarDigital Library
6. Blickhan, R. 1989. The spring-mass model for running and hopping. Journal of Biomechanics 22, 11–12.Google ScholarCross Ref
7. da Silva, M., Abe, Y., and Popović, J. 2008. Interactive simulation of stylized human locomotion. In ACM Trans. on Graphics (SIGGRAPH), vol. 27, 1–10. Google ScholarDigital Library
8. Faloutsos, P., van de Panne, M., and Terzopoulos, D. 2001. Composable controllers for physics-based character animation. In ACM Trans. on Graphics (SIGGRAPH), 251–260. Google ScholarDigital Library
9. Gershwin, S. B., and Jacobson, D. H. 1968. A discrete-time differential dynamic programming algorithm with application to optimal orbit transfer. Tech. rep., Harvard University.Google Scholar
10. Gill, P., Saunders, M., and Murray, W. 1996. Snopt: An sqp algorithm for large-scale constrained optimization. Tech. Rep. NA 96-2, University of California, San Diego.Google Scholar
11. Goswami, A., and Kallem, V. 2004. Rate of change of angular momentum and balance maintenance of biped robots. In Proc. IEEE Int’l Conf on Robotics and Automation, IEEE, 3785–3790.Google Scholar
12. Herr, H., and Popovic, M. 2008. Angular momentum in human walking. In Journal of Experimental Biology.Google Scholar
13. Hodgins, J. K., and Pollard, N. S. 1997. Adapting simulated behaviors for new characters. In ACM Trans. on Graphics (SIGGRAPH), 153–162. Google ScholarDigital Library
14. Hodgins, J. K., Wooten, W. L., Brogan, D. C., and O’Brien, J. F. 1995. Animating human athletics. In ACM Trans. on Graphics (SIGGRAPH), 71–78. Google ScholarDigital Library
15. Jacobson, D. H., and Mayne, D. Q. 1970. Differential dynamic programming. American Elsevier Pub. Co., New York.Google Scholar
16. Jain, S., Ye, Y., and Liu, C. K. 2009. Optimization-based interactive motion synthesis. ACM Trans. on Graphics 28, 1. Google ScholarDigital Library
17. Kajita, S., Kanehiro, F., Kaneko, K., Fujiwara, K., Harada, K., Yokoi, K., and Hirukawa, H. 2003. Resolved momentum control: humanoid motion planning based on the linear and angular momentum. In Intelligent Robots and Systems, 1644–1650.Google Scholar
18. Komura, T., Leung, H., and Kuffner, J. 2004. Animating reactive motions for biped locomotion. In VRST ’04: Proceedings of the ACM symposium on Virtual reality software and technology, 32–40. Google ScholarDigital Library
19. Kuo, A., Donelan, J., and Ruina, A. 2005. Energetic consequences of walking like an inverted pendulum: step-to-step transitions. Exerc Sport Sci Rev 33, 2.Google ScholarCross Ref
20. Laszlo, J., van de Panne, M., and Fiume, E. 1996. Limit cycle control and its application to the animation of balancing and walking. In ACM Trans. on Graphics (SIGGRAPH). Google ScholarDigital Library
21. Liu, C., and Atkeson, C. 2009. Standing balance control using a trajectory library. In Int’l Conf on Intelligent Robots and Systems (IROS), 3031–3036. Google ScholarDigital Library
22. Liu, C. K., and Popović, Z. 2002. Synthesis of complex dynamic character motion from simple animations. ACM Trans. on Graphics (SIGGRAPH) 21, 3 (July), 408–416. Google ScholarDigital Library
23. Macchietto, A., Zordan, V., and Shelton, C. R. 2009. Momentum control for balance. ACM Trans. on Graphics (SIGGRAPH) 28, 3, 1–8. Google ScholarDigital Library
24. Muico, U., Lee, Y., Popović, J., and Popović, Z. 2009. Contact-aware nonlinear control of dynamic characters. ACM Trans. on Graphics (SIGGRAPH) 28, 3, 1–9. Google ScholarDigital Library
25. Neff, M., and Fiume, E. 2002. Modeling tension and relaxation for computer animation. In Eurographics/SIGGRAPH Symposium on Computer Animation, 81–88. Google ScholarDigital Library
26. Pollard, N. S., and Behmaram-Mosavat, F. 2000. Force-based motion editing for locomotion tasks. In Proceedings of the IEEE International Conference on Robotics and Automation.Google Scholar
27. Popović, Z., and Witkin, A. 1999. Physically based motion transformation. In ACM Trans. on Graphics (SIGGRAPH). Google ScholarDigital Library
28. Popovic, M., Hofmann, A., and Herr, H. 2004. Zero spin angular momentum control: definition and applicability. In IEEE/RAS International Conference on Humanoid Robots.Google Scholar
29. Shapiro, A., and Lee, S.-H. 2009. Practical character physics for animators. In ACM SIGGRAPH 2009 Talks. Google ScholarDigital Library
30. Shiratori, T., Coley, B., Cham, R., and Hodgins, J. K. 2009. Simulating balance recovery responses to trips based on biomechanical principles. In Proceedings of the ACM SIGGRAPH/Eurographics Symposium on Computer Animation. Google ScholarDigital Library
31. Sok, K. W., Kim, M., and Lee, J. 2007. Simulating biped behaviors from human motion data. ACM Trans. on Graphics (SIGGRAPH) 26, 3 (Aug.), 107. Google ScholarDigital Library
32. Speyer, J. L., and Bryson, A. E. 1968. A neighboring optimum feedback control scheme based on estimated time-to-go with application to re-entry flight paths. In AIAA Journal, vol. 6.Google Scholar
33. Stephens, B., and Atkeson, C. 2009. Modeling and control of periodic humanoid balance using the linear biped model. In Proc. IEEE Int’l Conf. on Humanoid Robotics.Google Scholar
34. van de Panne, M. 1997. From footprints to animation. Computer Graphics Forum 16, 4 (October).Google ScholarCross Ref
35. Wampler, K., and Popović, Z. 2009. Optimal gait and form for animal locomotion. ACM Trans. on Graphics 28, 3, 1–8. Google ScholarDigital Library
36. Wang, J., Fleet, D., and Hertzmann, A. 2009. Optimizing walking controller. ACM Trans. on Graphics (SIGGRAPH) 28, 5 (Dec.). Google ScholarDigital Library
37. Whitman, E., and Atkeson, C. G. 2009. Control of a walking biped using a combination of simple policies. In IEEE Int’l Conf. on Humanoid Robotics.Google Scholar
38. Wooten, W. L. 1998. Simulation of Leaping, Tumbling, Landing, and Balancing Humans. PhD thesis, Georgia Institute of Technology. Google ScholarDigital Library
39. Yamane, K., and Hodgins, J. 2009. Simultaneous tracking and balancing of humanoid robots for imitating human motion capture data. In Int’l Conf on Intelligent Robots and Systems (IROS). Google ScholarDigital Library
40. Ye, Y., and Liu, C. K. 2008. Animating responsive characters with dynamic constraints in near-unactuated coordinates. ACM Trans. on Graphics (SIGGRAPH ASIA) 27, 5, 1–5. Google ScholarDigital Library
41. Yin, K., Cline, M. B., and Pai, D. K. 2003. Motion perturbation based on simple neuromotor control models. In Pacific Graphics. Google ScholarDigital Library
42. Yin, K., Loken, K., and van de Panne, M. 2007. Simbicon: simple biped locomotion control. ACM Trans. on Graphics (SIGGRAPH) 26, 3, 105. Google ScholarDigital Library
43. Zordan, V. B., and Hodgins, J. K. 1999. Tracking and modifying upper-body human motion data with dynamic simulation. In EG Workshop on Computer Animation and Simulation.Google Scholar
44. Zordan, V. B., and Hodgins, J. K. 2002. Motion capture-driven simulations that hit and react. In Eurographics/SIGGRAPH Symposium on Computer Animation, 89–96. Google ScholarDigital Library
45. Zordan, V. B., Majkowska, A., Chiu, B., and Fast, M. 2005. Dynamic response for motion capture animation. ACM Trans. on Graphics (SIGGRAPH) 24, 3 (July), 697–701. Google ScholarDigital Library