
“Nonuniform Depth Distribution Selection with Discrete Fourier Transform” by Jorissen, Goorts, Lafruit and Bekaert
Conference:
Type(s):
Entry Number: 74
Title:
- Nonuniform Depth Distribution Selection with Discrete Fourier Transform
Presenter(s)/Author(s):
Abstract:
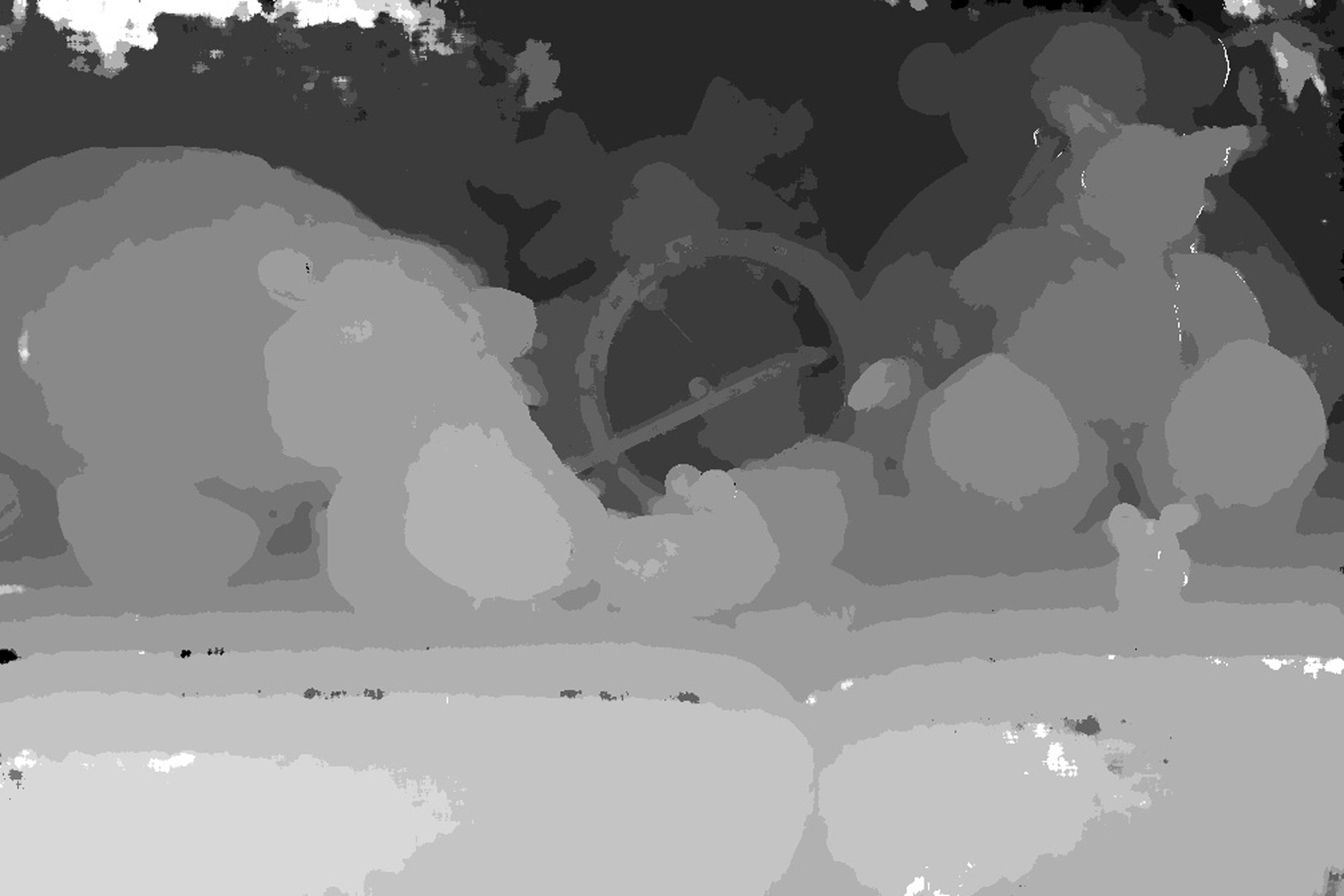
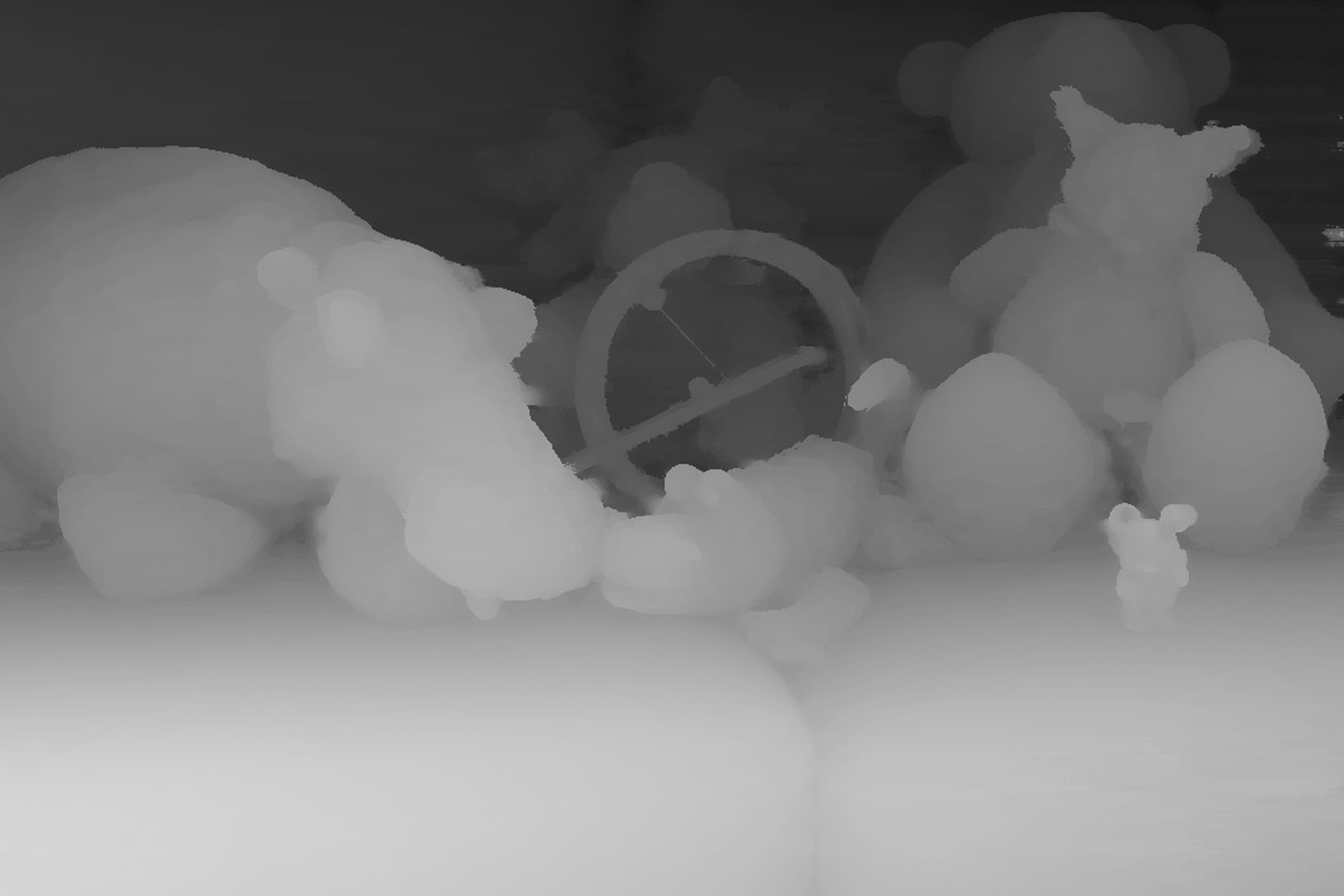
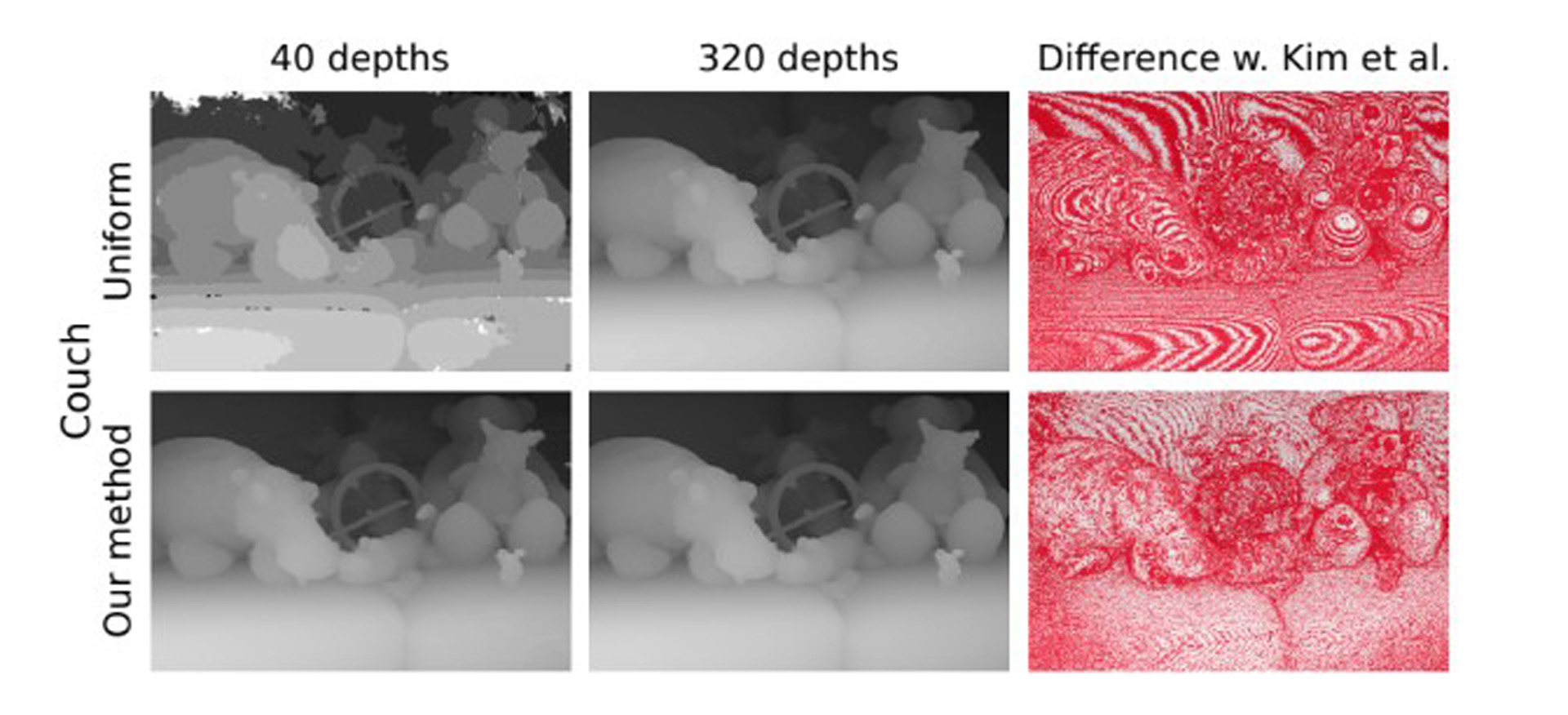
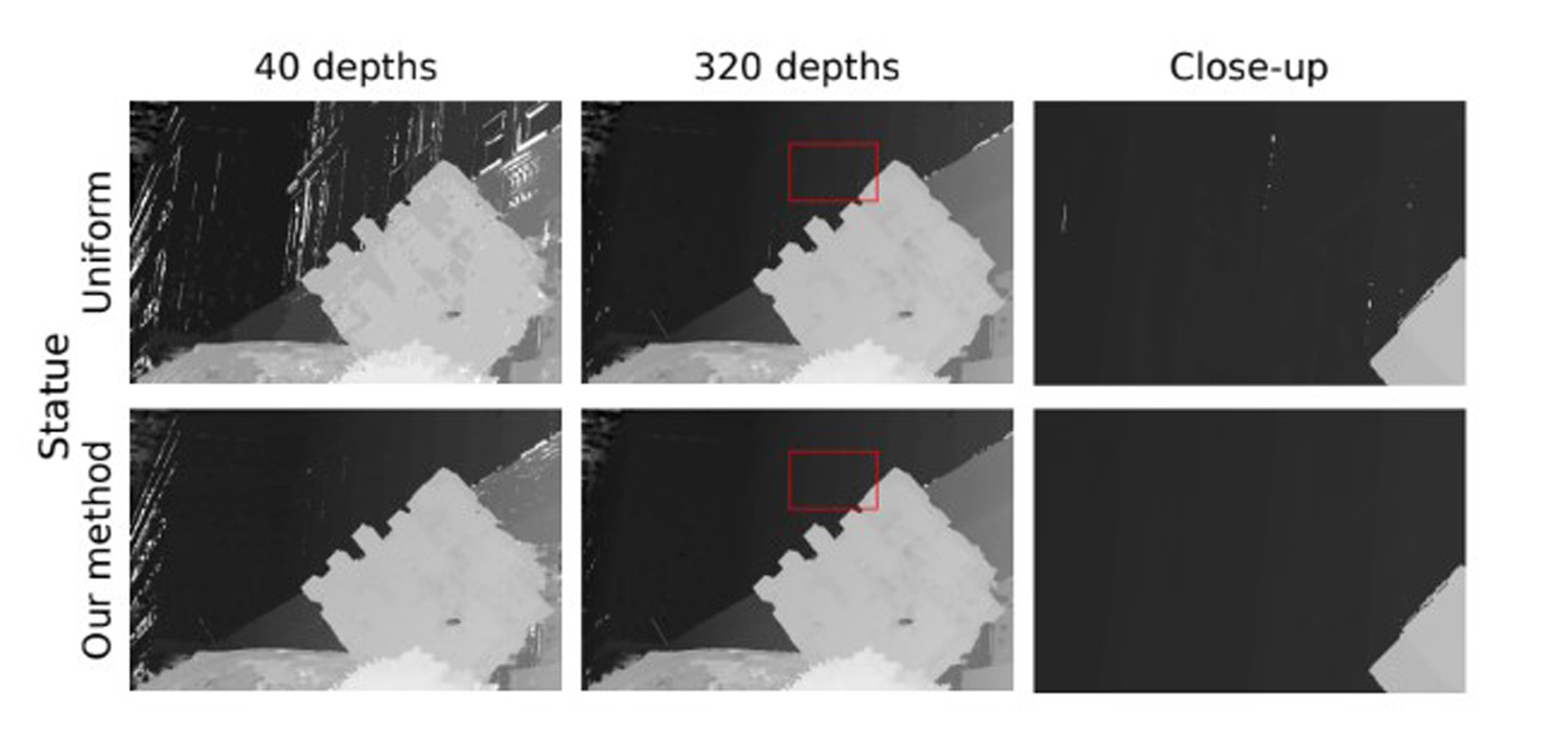
In recent years there is a growing interest in the generation of virtual views from a limited set of input cameras. This is especially useful for applications such as Free Viewpoint Navigation and light field displays [Tanimoto 2015]. The latter often requires tens to hundreds of input views, while it is often not feasible to record with as many cameras. View interpolation algorithms often traverse a set of depths to find correspondences between the input images [Stankiewicz et al. 2013; Goorts et al. 2013]. Most algorithms choose a uniform set of depths to traverse (as shown in Figure 2(a)), but this often leads to an excessive amount of unnecessary calculations in regions where no objects are located. It also results in an increased amount of mismatches, and thus, inaccuracies in the generated views. These problems also occur when a too large depth range is selected. Hence, typically a depth range that encloses the scene tightly is manually selected to mitigate these errors. A depth distribution that organizes the depth layers around the objects in the scene, as shown in Figure 2(b), would reduce these errors and decrease the number of computations by reducing the number of depths to search through. [Goorts et al. 2013] determine a nonuniform global depth distribution by reusing the generated depth information from the previous time stamp. This makes the algorithm dependent on previous results.
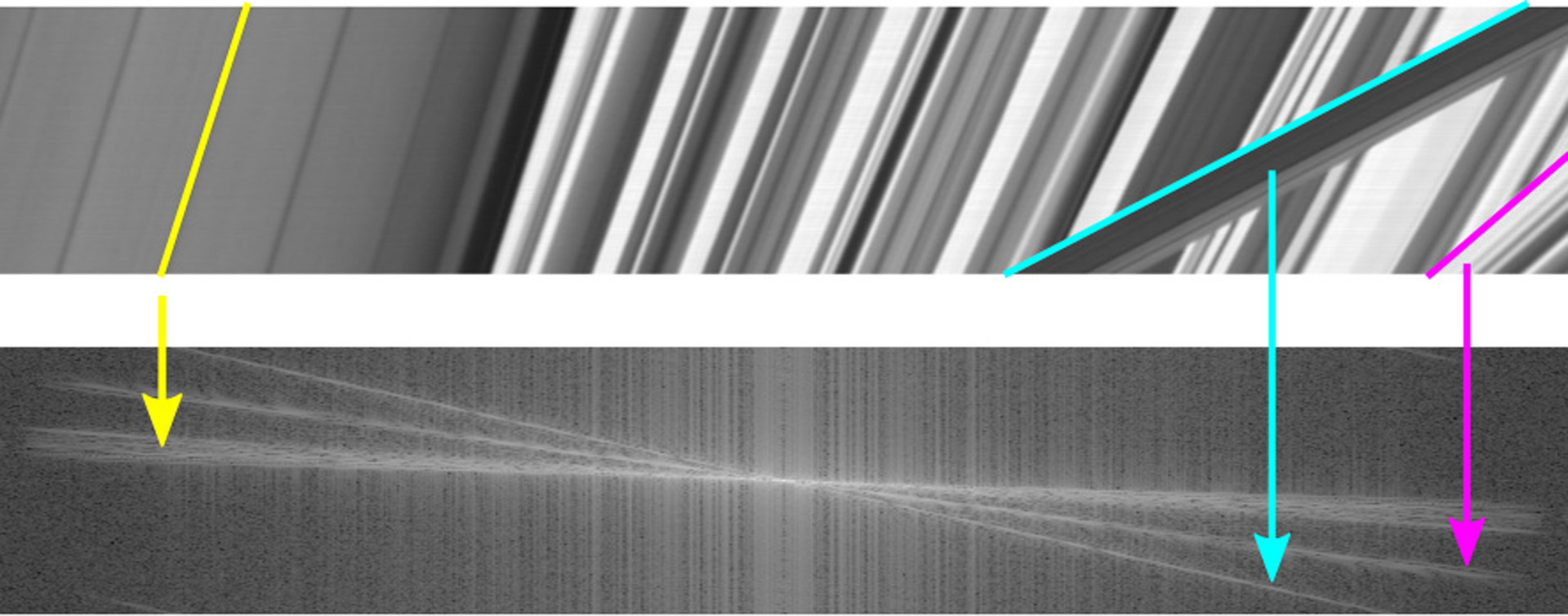
We propose a depth distribution selection method that uses the Discrete Fourier Transform (DFT) of light field structures that arise in linear multi-view camera setups. This allows us to generate a depth distribution per scanline, without injecting possibly unstable data from previous time stamps.
Keyword(s):
Additional Images:
Acknowledgements:
Part of this research is funded by the European Commission in the scope of the FP7 DREAMSPACE project.