
“Multi-finger haptic interaction for soft tissue exclusion manipulation” by Kuroda, Hirai, Nakao, Kuroda and Yoshihara
Conference:
Type(s):
Title:
- Multi-finger haptic interaction for soft tissue exclusion manipulation
Presenter(s)/Author(s):
Abstract:
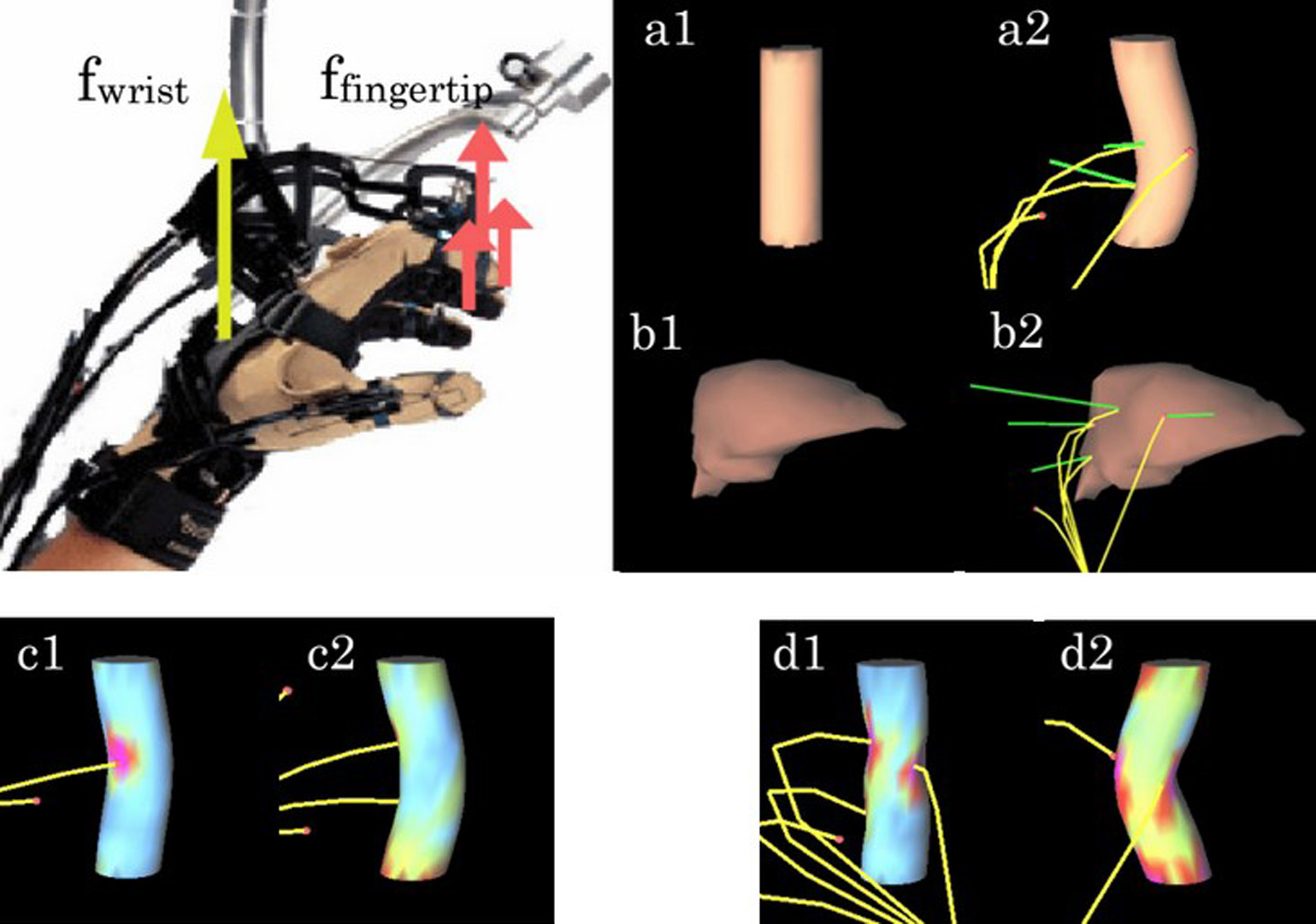
Virtual reality simulator allows flexible and repeatable interaction with living organs without spoiling them. Therefore, for training of surgical manipulations, VR simulators that support cutting, palpating, suturing and other medical manipulations has been developed, so far. However, most simulators have limitation of one or two finger haptic interaction, although surgeon maneuvers their several fingers. This paper proposes a method for multi-finger haptic interaction with FEM (Finite Element Method) based deformable model. The method is applied to the medical application of exclusion which is a surgical manipulation of pushing aside soft tissue with less stress inflicted in order to make better surgical view or wider workspace. This paper examines the effectiveness with a developed prototype system.
References:
1. Hirota, K., and Kaneko, T. 2001. Haptic Representation of Elastic Objects. MIT Presence: Teleoperators and Virtual Environments, 10(5), 525–536