
“Momentum-Mapped Inverted Pendulum Models for Controlling Dynamic Human Motions”
Conference:
Type(s):
Title:
- Momentum-Mapped Inverted Pendulum Models for Controlling Dynamic Human Motions
Presenter(s)/Author(s):
Abstract:
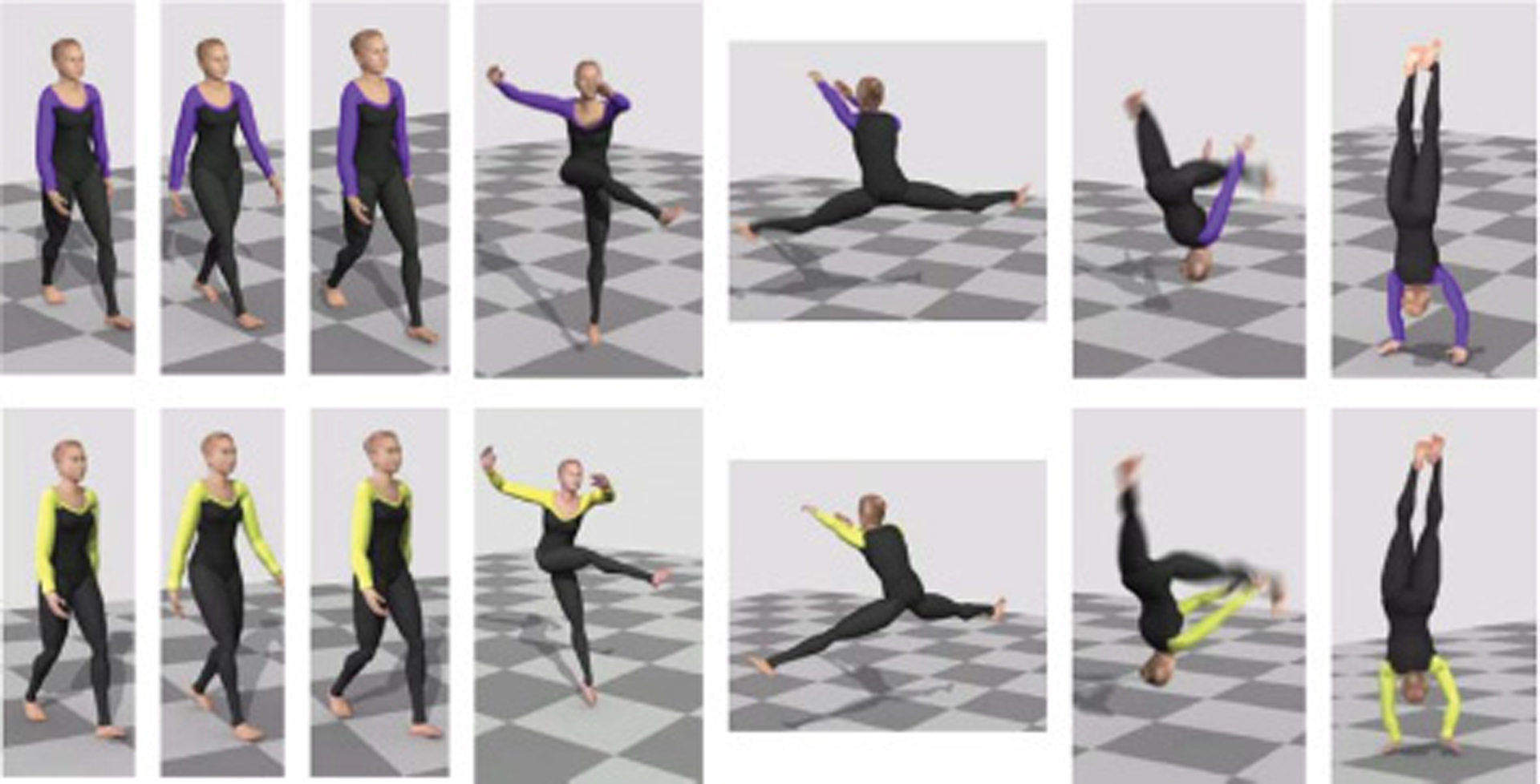
Designing a unified framework for simulating a broad variety of human behaviors has proven to be challenging. In this article, we present an approach for control system design that can generate animations of a diverse set of behaviors including walking, running, and a variety of gymnastic behaviors. We achieve this generalization with a balancing strategy that relies on a new form of inverted pendulum model (IPM), which we call the momentum-mapped IPM (MMIPM). We analyze reference motion capture data in a pre-processing step to extract the motion of the MMIPM. To compute a new motion, the controller plans a desired motion, frame by frame, based on the current pendulum state and a predicted pendulum trajectory. By tracking this time-varying trajectory, the controller creates a character that dynamically balances, changes speed, makes turns, jumps, and performs gymnastic maneuvers.
References:
1. Yeuhi Abe, Marco da Silva, and Jovan Popović. 2007. Multiobjective control with frictional contacts. In Proceedings of the 2007 ACM SIGGRAPH/Eurographics Symposium on Computer Animation. 249–258.Google ScholarDigital Library
2. Okan Arikan and David A. Forsyth. 2002. Interactive motion generation from examples. ACM Transactions on Graphics 21, 3 (2002), 483–490. Google ScholarDigital Library
3. Mazen Al Borno, Eugene Fiume, A. Hertzmann, and M. de Lasa. 2014. Feedback control for rotational movements in feature space. Computer Graphics Forum (2014).Google Scholar
4. David Brown, Adriano Macchietto, Kang Kang Yin, and Victor Zordan. 2013. Control of rotational dynamics for ground behaviors. In Proceedings of the 2013 ACM SIGGRAPH/Eurographics Symposium on Computer Animation. 55–61. Google ScholarDigital Library
5. James R. Cloutier. 1997. State-dependent Riccati equation techniques: An overview. In Proceedings of the 1997 American Control Conference. 932–936. Google ScholarCross Ref
6. Stelian Coros, Philippe Beaudoin, and Michiel van de Panne. 2009. Robust task-based control policies for physics-based characters. ACM Transactions on Graphics 28, 5 (2009), 1–9. Google ScholarDigital Library
7. Stelian Coros, Philippe Beaudoin, and Michiel van de Panne. 2010. Generalized biped walking control. ACM Transactions on Graphics 29, 4 (2010), 130.Google ScholarDigital Library
8. Marco da Silva, Yeuhi Abe, and Jovan Popović. 2008. Interactive simulation of stylized human locomotion. ACM Transactions on Graphics 27, 3 (2008), 1–10. Google ScholarDigital Library
9. Martin de Lasa, Igor Mordatch, and Aaron Hertzmann. 2010. Feature-based locomotion controllers. ACM Transactions on Graphics 29, 4 (2010), 131.Google ScholarDigital Library
10. Peter Dorato, Vito Cerone, and Chaouki Abdallah. 1994. Linear-Quadratic Control: An Introduction. Simon 8 Schuster.Google Scholar
11. Sehoon Ha and C. Karen Liu. 2014. Iterative training of dynamic skills inspired by human coaching techniques. ACM Transactions on Graphics 34, 1 (2014), 1:1–1:11.Google ScholarDigital Library
12. Sehoon Ha, Yuting Ye, and C. Karen Liu. 2012. Falling and landing motion control for character animation. ACM Transactions on Graphics 31, 6 (2012), 155.Google ScholarDigital Library
13. Nikolaus Hansen and Andreas Ostermeier. 1996. Adapting arbitrary normal mutation distributions in evolution strategies: The covariance matrix adaptation. In International Conference on Evolutionary Computation. 312–317. Google ScholarCross Ref
14. Rachel Heck and Michael Gleicher. 2007. Parametric motion graphs. In Proceedings of the 2007 ACM Symposium on Interactive 3D Graphics and Games. 129–136. Google ScholarDigital Library
15. Jessica K. Hodgins, Wayne L. Wooten, David C. Brogan, and James F. O’Brien. 1995. Animating human athletics. In ACM SIGGRAPH. 71–78. Google ScholarDigital Library
16. Shuuji Kajita, Takashi Nagasaki, Kenji Kaneko, Kazuhito Yokoi, and Kazuo Tanie. 2004. A hop towards running humanoid biped. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation. 629–635. Google ScholarCross Ref
17. Lucas Kovar, Michael Gleicher, and Frédéric Pighin. 2002a. Motion graphs. ACM Transactions on Graphics 21, 3 (2002), 473–482. Google ScholarDigital Library
18. Lucas Kovar, John Schreiner, and Michael Gleicher. 2002b. Footskate cleanup for motion capture editing. In Proceedings of the 2002 ACM SIGGRAPH/Eurographics Symposium on Computer Animation. 97–104. Google ScholarDigital Library
19. Taesoo Kwon and Jessica Hodgins. 2010. Control systems for human running using an inverted pendulum model and a reference motion capture sequence. In Proceedings of the 2010 ACM SIGGRAPH/Eurographics Symposium on Computer Animation. 129–138.Google ScholarDigital Library
20. Jehee Lee, Jinxiang Chai, Paul S. A. Reitsma, Jessica K. Hodgins, and Nancy S. Pollard. 2002. Interactive control of avatars animated with human motion data. ACM Transactions on Graphics 21, 3 (2002), 491–500. Google ScholarDigital Library
21. Sung-hee Lee. 2007. Reaction mass pendulum (RMP): An explicit model for centroidal angular momentum of humanoid robots. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation.Google Scholar
22. Sung-Hee Lee and Ambarish Goswami. 2012. A momentum-based balance controller for humanoid robots on non-level and non-stationary ground. Autonous Robots 33, 4 (2012), 399–414. Google ScholarCross Ref
23. Yoonsang Lee, Sungeun Kim, and Jehee Lee. 2010. Data-driven biped control. ACM Transactions on Graphics 29, 4 (2010), 129.Google ScholarDigital Library
24. Yoonsang Lee, Moon Seok Park, Taesoo Kwon, and Jehee Lee. 2014. Locomotion control for many-muscle humanoids. ACM Transactions on Graphics 33, 6 (2014), 218:1–218:11.Google ScholarDigital Library
25. Yongjoon Lee, Kevin Wampler, Gilbert Bernstein, Jovan Popović, and Zoran Popović. 2010. Motion fields for interactive character locomotion. ACM Transactions on Graphics 29, 6 (2010), 138.Google ScholarDigital Library
26. Sergey Levine and Jovan Popović. 2012. Physically plausible simulation for character animation. In Proceedings of the ACM SIGGRAPH/Eurographics Symposium on Computer Animation. 221–230.Google Scholar
27. Libin Liu, Michiel van de Panne, and KangKang Yin. 2016. Guided learning of control graphs for physics-based characters. ACM Transactions on Graphics 35, 3 (2016). Google ScholarDigital Library
28. Libin Liu, KangKang Yin, Michiel van de Panne, Tianjia Shao, and Weiwei Xu. 2010. Sampling-based contact-rich motion control. ACM Transactions on Graphics 29, 4 (2010), 128.Google ScholarDigital Library
29. Adriano Macchietto, Victor Zordan, and Christian R. Shelton. 2009. Momentum control for balance. ACM Transactions on Graphics 28, 3 (2009), 1–8. Google ScholarDigital Library
30. James McCann and Nancy Pollard. 2007. Responsive characters from motion fragments. ACM Transactions on Graphics 26, 3 (2007), 6.Google ScholarDigital Library
31. Igor Mordatch, Martin de Lasa, and Aaron Hertzmann. 2010. Robust physics-based locomotion using low-dimensional planning. ACM Transactions on Graphics 29, 4 (2010), 71.Google ScholarDigital Library
32. Uldarico Muico, Yongjoon Lee, Jovan Popović, and Zoran Popović. 2009. Contact-aware nonlinear control of dynamic characters. ACM Transactions on Graphics 28, 3 (2009), 1–9. Google ScholarDigital Library
33. Uldarico Muico, Jovan Popović, and Zoran Popović. 2011. Composite control of physically simulated characters. ACM Transactions on Graphics 30, 3 (2011), 16.Google ScholarDigital Library
34. Frank C. Park, James E. Bobrow, and Scott R. Ploen. 1995. A lie group formulation of robot dynamics. The International Journal of Robotics Research 14, 6 (1995), 609–618. Google ScholarDigital Library
35. Robert R. Playter and Marc Raibert. 1992. Control of a biped somersault in 3D. In Proceedings of the 1992 lEEE/RSJ International Conference on Intelligent Robots and Systems, Vol. 1. 582–589.Google Scholar
36. Marko B. Popovic, Andreas G. Hofmann, and Hugh M. Herr. 2004. Angular momentum regulation during human walking: Biomechanics and control. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation. 2405–2411. Google ScholarCross Ref
37. Alla Safonova, Jessica K. Hodgins, and Nancy S. Pollard. 2004. Synthesizing physically realistic human motion in low-dimensional, behavior-specific spaces. ACM Transactions on Graphics 23, 3 (2004), 514–521. Google ScholarDigital Library
38. Hyun Joon Shin, Jehee Lee, Sung Yong Shin, and Michael Gleicher. 2001. Computer puppetry: An importance-based approach. ACM Transactions on Graphics 20, 2 (2001), 67–94. Google ScholarDigital Library
39. Hyun Joon Shin and Hyun Seok Oh. 2006. Fat graphs: Constructing an interactive character with continuous controls. In Proceedings of the 2006 ACM SIGGRAPH/Eurographics Symposium on Computer Animation. 291–298.Google Scholar
40. Takaaki Shiratori, Brooke Coley Raki Cham, and Jessica K. Hodgins. 2009. Simulating balance recovery responses to trips based on biomechanical principles. In Proceedings of the 2009 ACM SIGGRAPH/Eurographics Symposium on Computer Animation. 37–46. Google ScholarDigital Library
41. Tomomichi Sugihara. 2008. Simulated regulator to synthesize ZMP manipulation and foot location for autonomous control of biped robots. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation. 1264–1269. Google ScholarCross Ref
42. Ryosuke Tajima, Daisaku Honda, and Keisuke Suga. 2009. Fast running experiments involving a humanoid robot. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation. 1571–1576. Google ScholarCross Ref
43. Adrien Treuille, Yongjoon Lee, and Zoran Popović. 2007. Near-optimal character animation with continuous control. ACM Transactions on Graphics 26, 3 (2007), 7.Google ScholarDigital Library
44. Jack M. Wang, David J. Fleet, and Aaron Hertzmann. 2009. Optimizing walking controllers. ACM Transactions on Graphics 28, 5 (2009), 1–8. Google ScholarDigital Library
45. Jack M. Wang, David J. Fleet, and Aaron Hertzmann. 2010. Optimizing walking controllers for uncertain inputs and environments. ACM Transactions on Graphics 29, 4 (2010), 73.Google ScholarDigital Library
46. Jack M. Wang, Samuel R. Hamner, Scott L. Delp, and Vladlen Koltun. 2012. Optimizing locomotion controllers using biologically-based actuators and objectives. ACM Transactions on Graphics 31, 4 (2012), 25.Google ScholarDigital Library
47. Wikipedia. 2014. Celestina Popa—Wikipedia, The Free Encyclopedia. (2014). [Online; accessed 3-April-2014]. https://en.wikipedia.org/wiki/Celestina_Popa.Google Scholar
48. Chun-Chih Wu and Victor Zordan. 2010. Goal-directed stepping with momentum control. In Proceedings of the 2010 ACM SIGGRAPH/Eurographics Symposium on Computer Animation. 113–118.Google ScholarDigital Library
49. Jia-chi Wu and Zoran Popović. 2010. Terrain-adaptive bipedal locomotion control. ACM Transactions on Graphics 29, 4 (2010), 72.Google Scholar
50. M. Yamakita, M. Kishikawa, and T. Sadahiro. 2003. Motion control for robust landing of acrobat robot (SMB). In Proceedings of the International Conference on Intelligent Robots and Systems. IEEE, 1141–1146. Google ScholarCross Ref
51. Yuting Ye and C. Karen Liu. 2010. Optimal feedback control for character animation using an abstract model. ACM Transactions on Graphics 29, 4 (2010), 74.Google ScholarDigital Library
52. KangKang Yin, Stelian Coros, Philippe Beaudoin, and Michiel van de Panne. 2008. Continuation methods for adapting simulated skills. ACM Transactions on Graphics 27, 3 (2008), 1–7. Google ScholarDigital Library
53. KangKang Yin, Kevin Loken, and Michiel van de Panne. 2007. SIMBICON: Simple biped locomotion control. ACM Transactions on Graphics 26, 3 (2007), 105.Google ScholarDigital Library
54. Victor B. Zordan, David F. Brown, Adriano Macchietto, and KangKang Yin. 2014. Control of rotational dynamics for ground and aerial behavior. IEEE Transactions on Visualization and Computer Graphics 20, 10 (2014), 1356–1366. Google ScholarCross Ref