
“Momentum control for balance” by Macchietto, Zordan and Shelton
Conference:
Type(s):
Title:
- Momentum control for balance
Presenter(s)/Author(s):
Abstract:
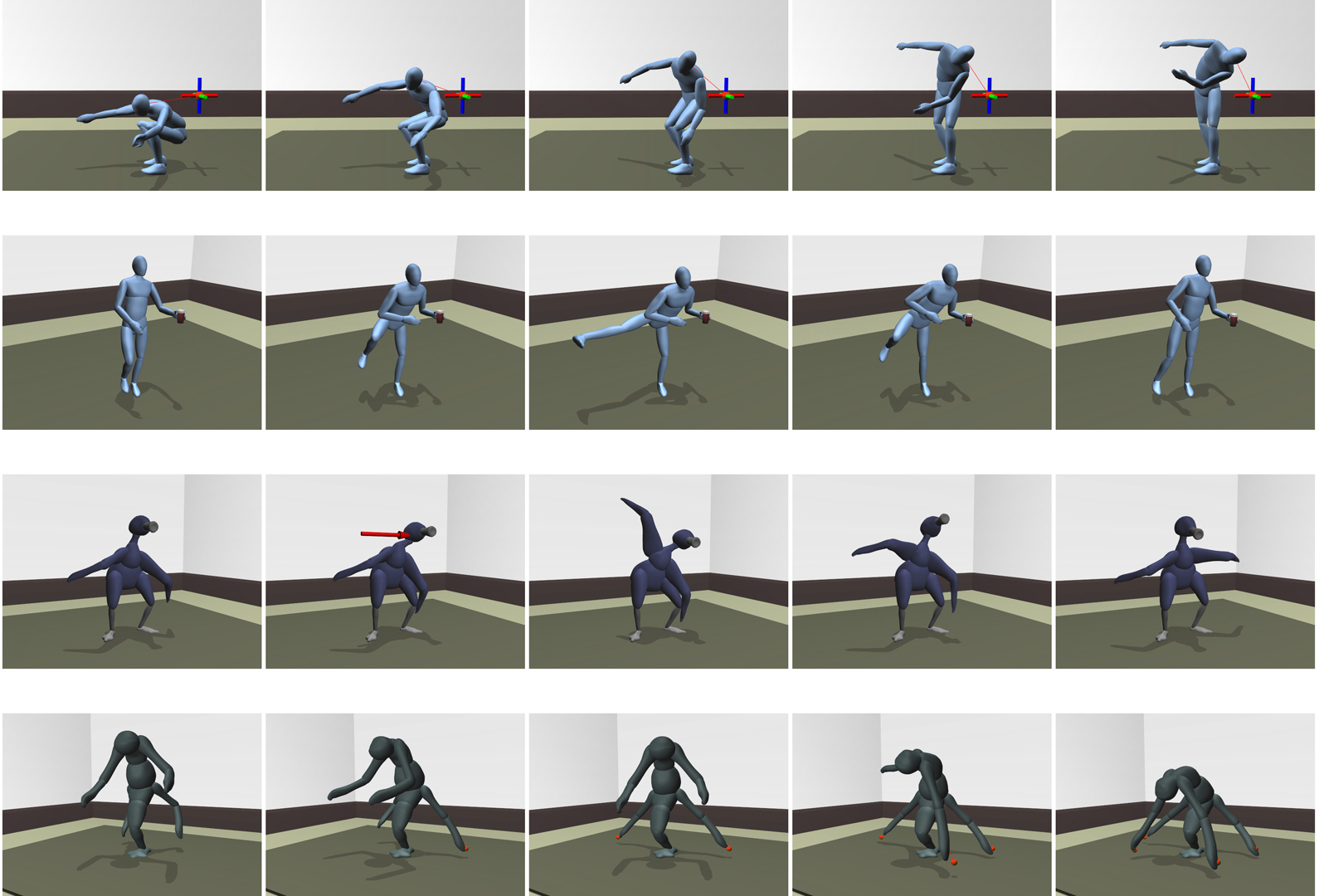
We demonstrate a real-time simulation system capable of automatically balancing a standing character, while at the same time tracking a reference motion and responding to external perturbations. The system is general to non-human morphologies and results in natural balancing motions employing the entire body (for example, wind-milling). Our novel balance routine seeks to control the linear and angular momenta of the character. We demonstrate how momentum is related to the center of mass and center of pressure of the character and derive control rules to change these centers for balance. The desired momentum changes are reconciled with the objective of tracking the reference motion through an optimization routine which produces target joint accelerations. A hybrid inverse/forward dynamics algorithm determines joint torques based on these joint accelerations and the ground reaction forces. Finally, the joint torques are applied to the free-standing character simulation. We demonstrate results for following both motion capture and keyframe data as well as both human and non-human morphologies in presence of a variety of conditions and disturbances.
References:
1. Abdallah, M., and Goswami, A. 2005. A biomechanically motivated two-phase strategy for biped upright balance control. In IEEE Int. Conf. Robotics and Automation.Google Scholar
2. Abe, Y., DaSilva, M., and Popović, J. 2007. Multiobjective control with frictional contacts. ACM SIGGRAPH/Eurographics Symposium on Computer Animation. Google ScholarDigital Library
3. Allen, B., Chu, D., Shapiro, A., and Faloutsos, P. 2007. On the beat!: timing and tension for dynamic characters. ACM SIGGRAPH/Eurographics Symposium on Computer Animation. Google ScholarDigital Library
4. Arikan, O., Forsyth, D. A., and O’Brien, J. F. 2005. Pushing people around. In ACM SIGGRAPH/Eurographics Symposium on Computer Animation. Google ScholarDigital Library
5. DaSilva, M., Abe, Y., and Popović, J. 2008. Interactive simulation of stylized human locomotion. ACM Transactions on Graphics 27(3). Google ScholarDigital Library
6. DaSilva, M., Abe, Y., and Popović, J. 2008. Simulation of Human Motion Data using Short-Horizon Model-Predictive Control. Computer Graphics Forum, 27(2).Google Scholar
7. Featherstone, R. 1987. Robot Dynamics Algorithm. Kluwer Academic Publishers. Google ScholarDigital Library
8. Featherstone, R. 2000. Robot dynamics: Equations and algorithms. In IEEE Int. Conf. Robotics and Automation.Google ScholarCross Ref
9. Goswami, A., and Kallem, V. 2004. Rate of change of angular momentum and balance maintenance of biped robots. IEEE Int. Conf. Robotics and Automation.Google Scholar
10. Hofmann, A., Massaquoi, S., Popovic, M., and Herr, H. 2004. A sliding controller for bipedal balancing using integrated movement of contact and non-contact limbs. In Intelligent Robots and Systems.Google Scholar
11. Kajita, S., Kanehiro, F., Kaneko, K., Fujiwara, K., Harada, K., Yokoi, K., and Hirukawa, H. 2003. Resolved momentum control: humanoid motion planning based on the linear and angular momentum. Intelligent Robots and Systems.Google Scholar
12. Komura, T., Leung, H., and Kuffner, J. 2004. Animating reactive motions for biped locomotion. In ACM symposium on Virtual Reality Software and Technology. Google ScholarDigital Library
13. Komura, T., Ho, E. S., and Lau, R. W. 2005. Animating reactive motion using momentum-based inverse kinematics. Compute Animation and Virtual Worlds 1, 16. Google ScholarDigital Library
14. Kudoh, S., Komura, T., and Ikeuchi, K. 2002. The dynamic postural adjustment with the quadratic programming method. In Intelligent Robots and Systems.Google Scholar
15. Kudoh, S., Komura, T., and Ikeuchi, K. 2006. Stepping motion for a humanlike character to maintain balance against large perturbations. In IEEE Int. Conf. Robotics and Automation.Google Scholar
16. Macchietto, A., 2008. Momentum-based control for simulated characters. Master’s Thesis, University of California, Riverside.Google Scholar
17. Mandel, M., 2004. Versatile and interactive virtual humans. Master’s Thesis, Carnegie Mellon University.Google Scholar
18. Orin, D., and Goswami, A. 2008. Centroidal momentum matrix of a humanoid robot: Structure and properties. In Intelligent Robots and Systems.Google Scholar
19. Popovic, M., Hofmann, A., and Herr, H. 2004. Angular momentum regulation during human walking: biomechanics and control. IEEE Int. Conf. Robotics and Automation.Google Scholar
20. Popovic, M., Hofmann, A., and Herr, H. 2004. Zero spin angular momentum control: definition and applicability. IEEE/RAS International Conference on Humanoid Robots.Google Scholar
21. Shapiro, A., Pighin, F., and Faloutsos, P. 2003. Hybrid control for interactive character animation. Pacific Graphics. Google ScholarDigital Library
22. Sok, K. W., Kim, M., and Lee, J. 2007. Simulating biped behaviors from human motion data. ACM Transactions on Graphics 26, 3. Google ScholarDigital Library
23. Stephens, B. 2007. Humanoid Push Recovery. In IEEE-RAS International Conference on Humanoid Robots.Google Scholar
24. Wooten, W., and Hodgins, J. 2000. Simulating leaping, tumbling, landing and balancing humans. IEEE Int. Conf. Robotics and Automation.Google Scholar
25. Yin, K., Cline, M., and Pai, D. 2003. Motion perturbation based on simple neuromotor control models. Pacific Graphics. Google ScholarDigital Library
26. Yin, K., Pai, D., and van de Panne, M. 2005. Data-driven interactive balancing behaviors. Pacific Graphics.Google Scholar
27. Yin, K., Loken, K., and van de Panne, M. 2007. Simbicon: Simple biped locomotion control. ACM Transactions on Graphics 26, 3. Google ScholarDigital Library
28. Yin, K., Coros, S., Beaudoin, P., and van de Panne, M. 2008. Continuation methods for adapting simulated skills. ACM Transactions on Graphics 27(3). Google ScholarDigital Library
29. Zordan, V. B., and Hodgins, J. K. 2002. Motion capture-driven simulations that hit and react. In ACM SIGGRAPH / Eurographics Symposium on Computer Animation. Google ScholarDigital Library
30. Zordan, V. B., Majkowska, A., Chiu, B., and Fast, M. 2005. Dynamic response for motion capture animation. ACM Transactions on Graphics 24, 3. Google ScholarDigital Library