
“Marker-less object recognition for surface computing” by Ozawa, Abe, Naruto, Nakae, Nakamura, et al. …
Conference:
Type(s):
Entry Number: 71
Title:
- Marker-less object recognition for surface computing
Presenter(s)/Author(s):
Abstract:
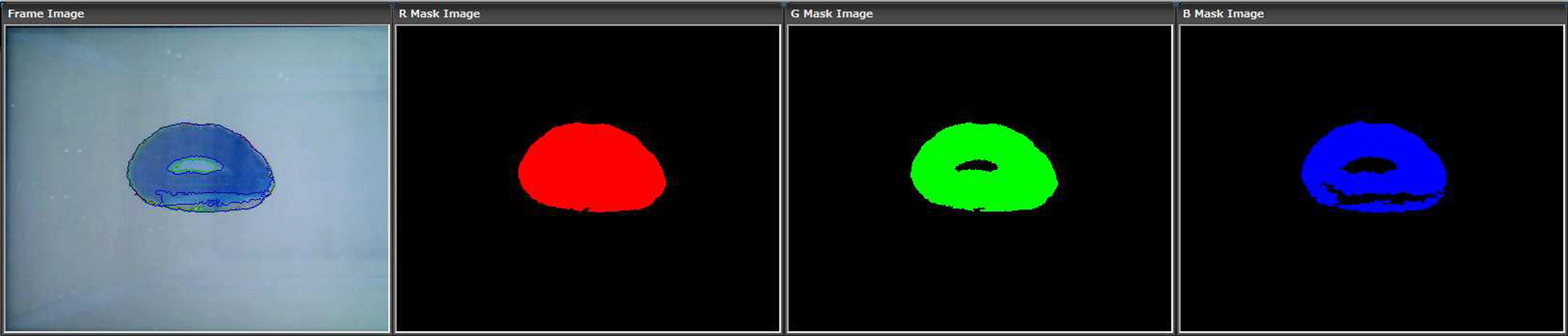
In surface computing, one of the most important requirements is tracking an object placed on the surface and manipulating information related to that object. To recognize objects, the most popular technique is marker tracking using techniques such as RFID, tag-like TarckMate[Kumpf 2009] and so on. The issues with marker tracking are the effort required to paste the tag and the existence of objects that are difficult to mark with a tag. To recognize objects without tags, feature point tracking on the image plane is one of the most effective ways in the area of the computer vision[Lowe 2004]. Unfortunately it is difficult to extract features from images taken through the frosted glass that is often used in surface computing. In addition, one cannot extract the feature points from objects without strong texture. In this paper, we present a marker-less object recognition system using multi channel silhouettes and quantized polar coordinates.
References:
Kumpf, A. 2009. Trackmate: Large-scale accessibility of tangible user interfaces. Thesis (M.S.)–Massachusetts Institute of Technology.Google Scholar
Lowe, D. G. 2004. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vision 60, 2, 91–110. Google Scholar