“Lumberjack: terrain model determination through virtual deforestation” by Rose
Conference:
Type(s):
Title:
- Lumberjack: terrain model determination through virtual deforestation
Presenter(s)/Author(s):
Abstract:
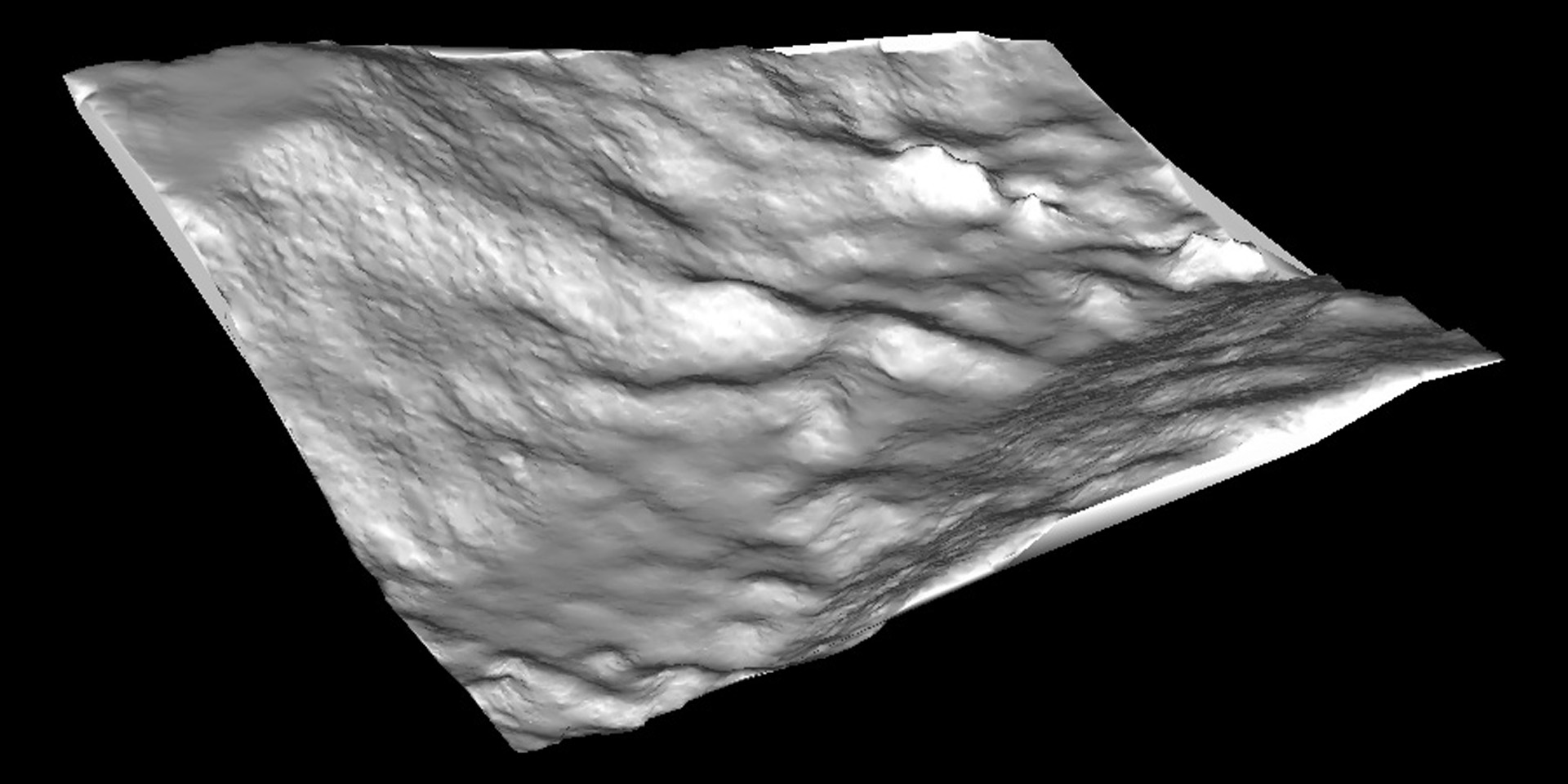
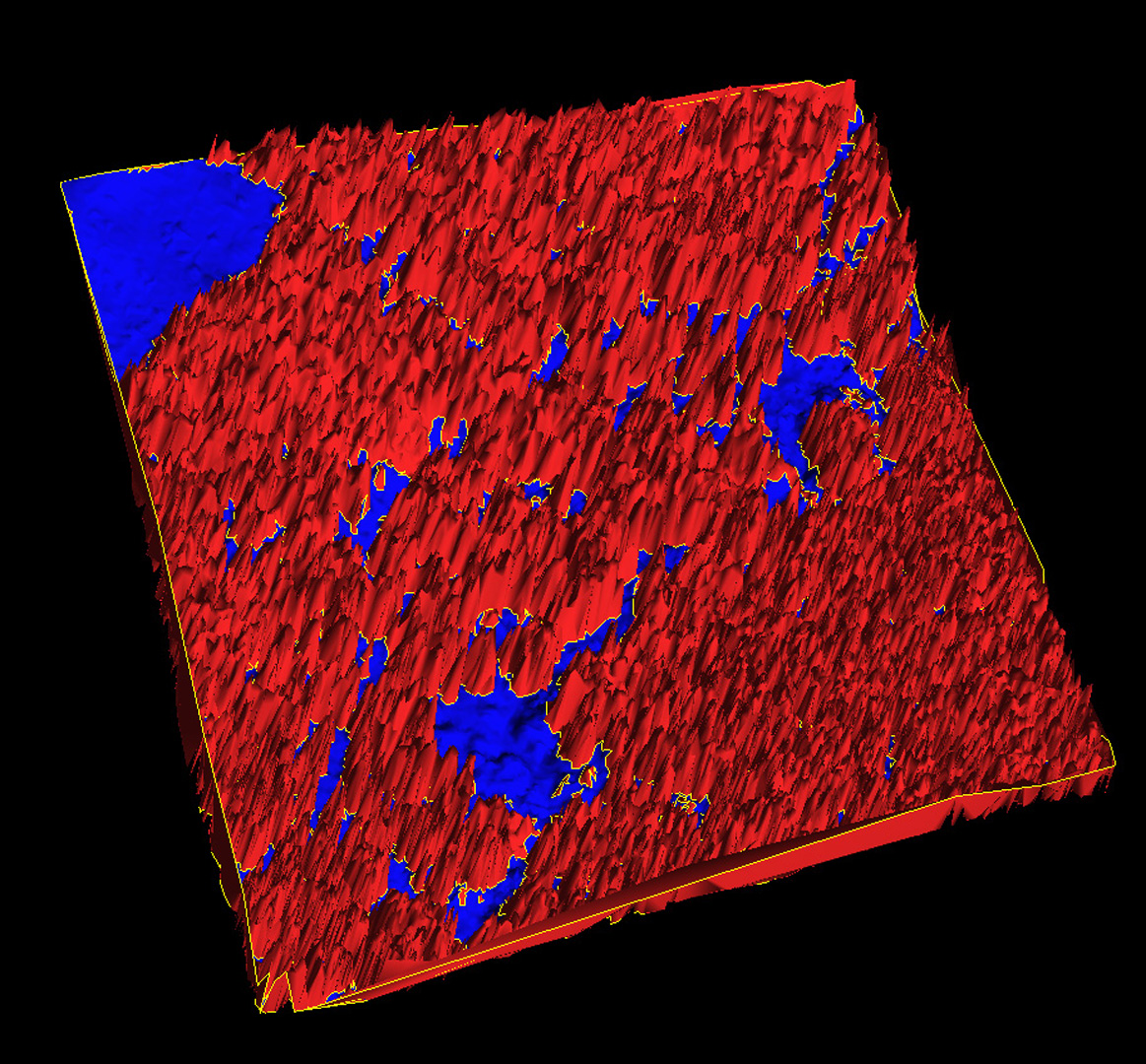
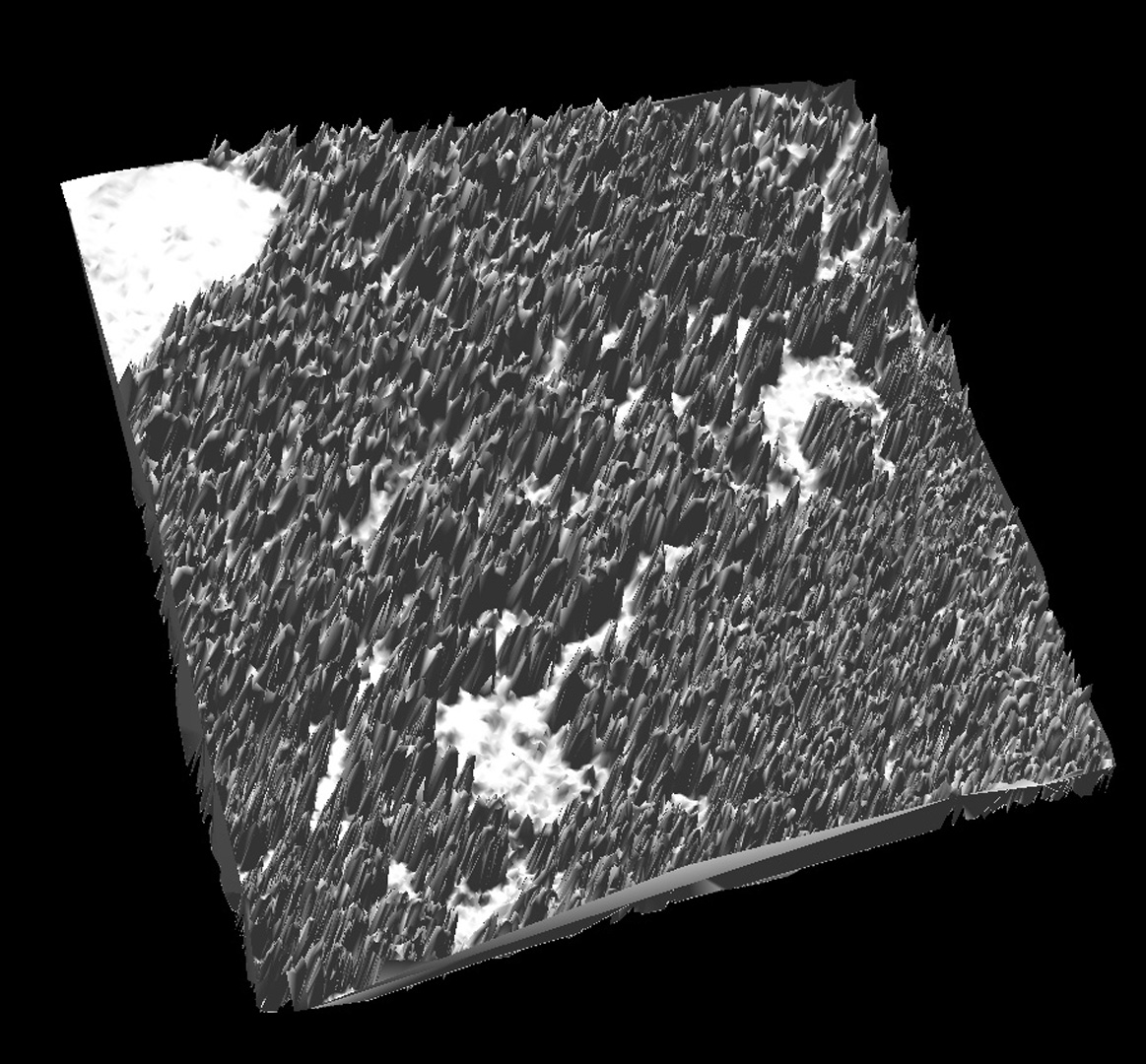
LiDAR (LIght Detection And Ranging) systems generally return data as a point cloud containing three dimensional coordinates cor- responding to elevations measured from overhead. The usual use of such data is the construction of a digital terrain model (DTM). Unfortunately, heavily wooded and forested regions often yield ob- stacles for LiDAR systems since the laser is prematurely reflected off of the tree tops and not off of the ground. As a result, offline filtering is normally performed on the resultant data to distinguish between ground points and “vegetation” points. Several unique approaches have been taken in the past to construct a digital terrain model from a point cloud ([Sithole and Vosselman 2003] provide a good survey). Our method is similar to that of [Haugerud and Harding 2001] and [Gal and Cohen-Or 2006] in that we identify high curvature as an indication of a strong boundary. Most algorithms for calculating curvature on a mesh require either a good triangulation or a high density of triangles (or both), properties not contained by the meshes produced from LiDAR data.
References:
1. Gal, R., and Cohen-Or, D. 2006. Salient geometric features for partial shape matching and similarity. ACM Trans. Graph. 25, 1, 130–150.
2. Haugerud, R. A., and Harding, D. J. 2001. Some algorithms for virtual deforestation (vdf) of lidar topographic survey data. International Archives of Photogrammetry and Remote Sensing XXXIV-3/W4, 211–217.
3. Sithole, G., and Vosselman, G. 2003. Comparison of filtering algorithms. In Proceedings of the ISPRS working group III/3 workshop.
Additional Images: