
“Interactive Object Segmentation in Video by Fitting Splines to Graph Cuts” by Drori, Leyvand, Cohen-Or and Yeshurun


Conference:
Type(s):
Entry Number: 059
Title:
- Interactive Object Segmentation in Video by Fitting Splines to Graph Cuts
Presenter(s)/Author(s):
Abstract:
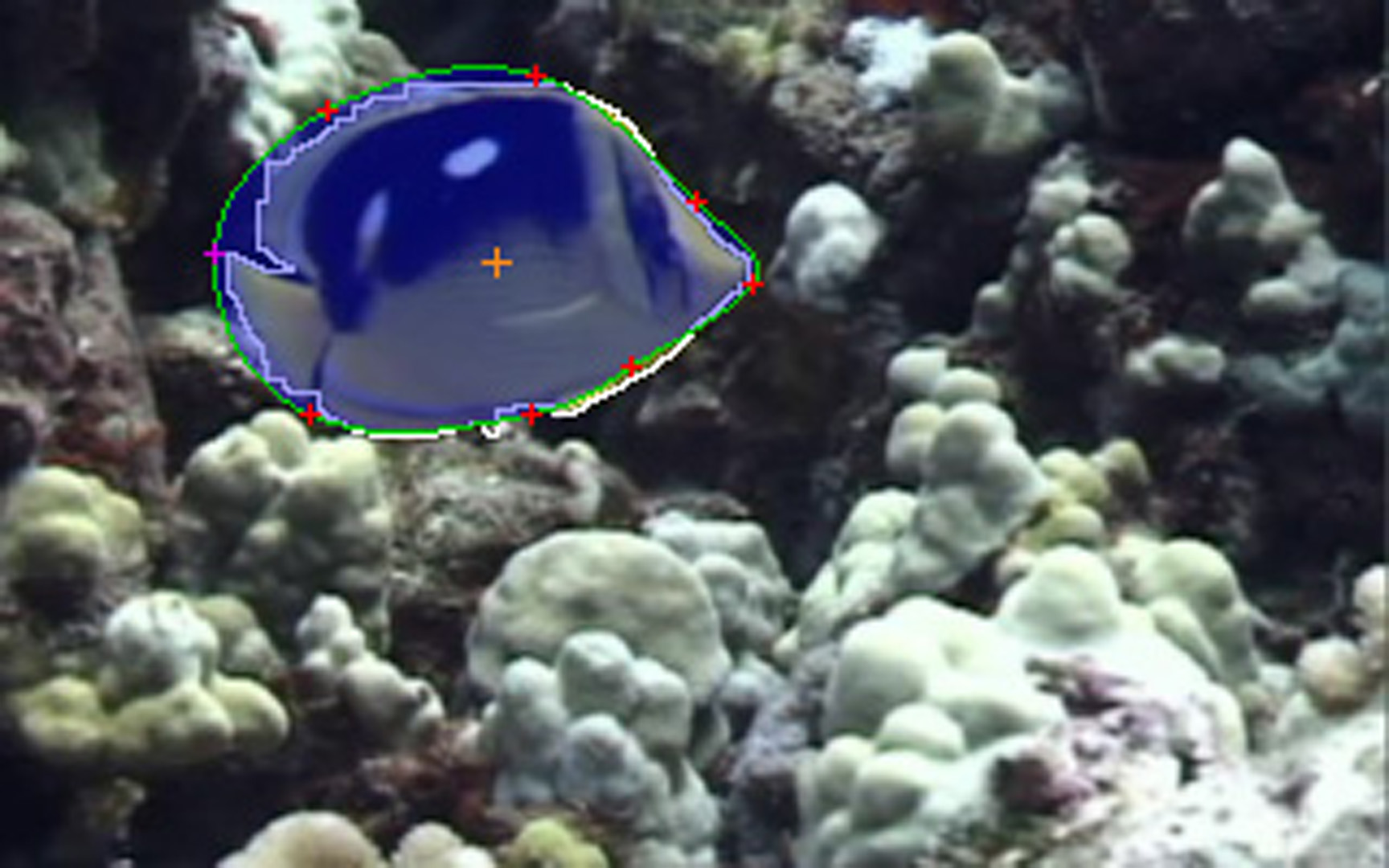
Object segmentation in image sequences is one of the fundamental problems in computer vision and graphics. This problem is usually addressed either by discrete representations which are currently manifested by graph partitioning techniques, or by continuous methods typically referred to as active contours. In this work we take a unified approach by fitting splines to graph cuts. The strengths of this approach stem from the dual discrete and continuous representations and from allowing the user to refine the result of the cut by fitting a new spline to it and modifying its points. Segmentation of an object in video is performed by a series of updates to the control points and computation of a minimum graph cut. Usually the graph cut results in a discrete representation over which the user has no control, and which is not always our desired result. Therefore our approach is to fit a spline to the resulting cut in key-frames. This allows the user to change the control points of the spline and then perform additional iterations of cut computation.
In order to extract an object from an input sequence the user first marks a point on the object and an area around it in a single frame. The object position is tracked forwards and backwards in time and the result is a set of discrete points (x,y,t). We fit a 3D spline to this set of points by a greedy algorithm. First, all of the discrete points are part of the spline. Next, in each iteration, we find the point whose removal from the set results in a new spline minimizing the overall error between the tracker data and spline. The error is global and measures the distance between the spline and the collection of points. Fitting is performed until reaching a minimum number of key-frames. The result is refined by the user by adding key-frames and modifying positions.
Additional Images:
