
“Interaction Capture and Synthesis” by Kry and Pai
Conference:
Type(s):
Talk Type(s):
Title:
- Interaction Capture and Synthesis
Session/Category Title:
- Interactive Modeling
Presenter(s)/Author(s):
Moderator(s):
Abstract:
A major challenge in motion capture research is how to modify a motion to satisfy the constraints of new animation. Motion transformation becomes difficult when contact is involved because physical interaction involves energy or power transfer between the system of interest and the environment (for example, an animated hand and a grasped object). Although contact force measurements provide a means of monitoring this transfer, motion capture as used for creating animation in movies and computer games has largely ignored contact forces.
Our approach is based on the hypothesis that for many motions, human motor control is similar to impedance-based control. That is, humans plan both the motion and stiffness of their joints, which allows interaction motions, such as grasping, to accommodate un- certainty in the actual position of objects or surfaces. Impedance control algorithms have previously been proposed as models for human motor control [Hogan 1984]. From synchronized capture of both force and motion we estimate the impedance, which relates the two during contact. We call this interaction capture. Using impedance estimates has real advantages over arbitrarily selected values since stiffness depends on both pose and task [Milner and Franklin 1998].
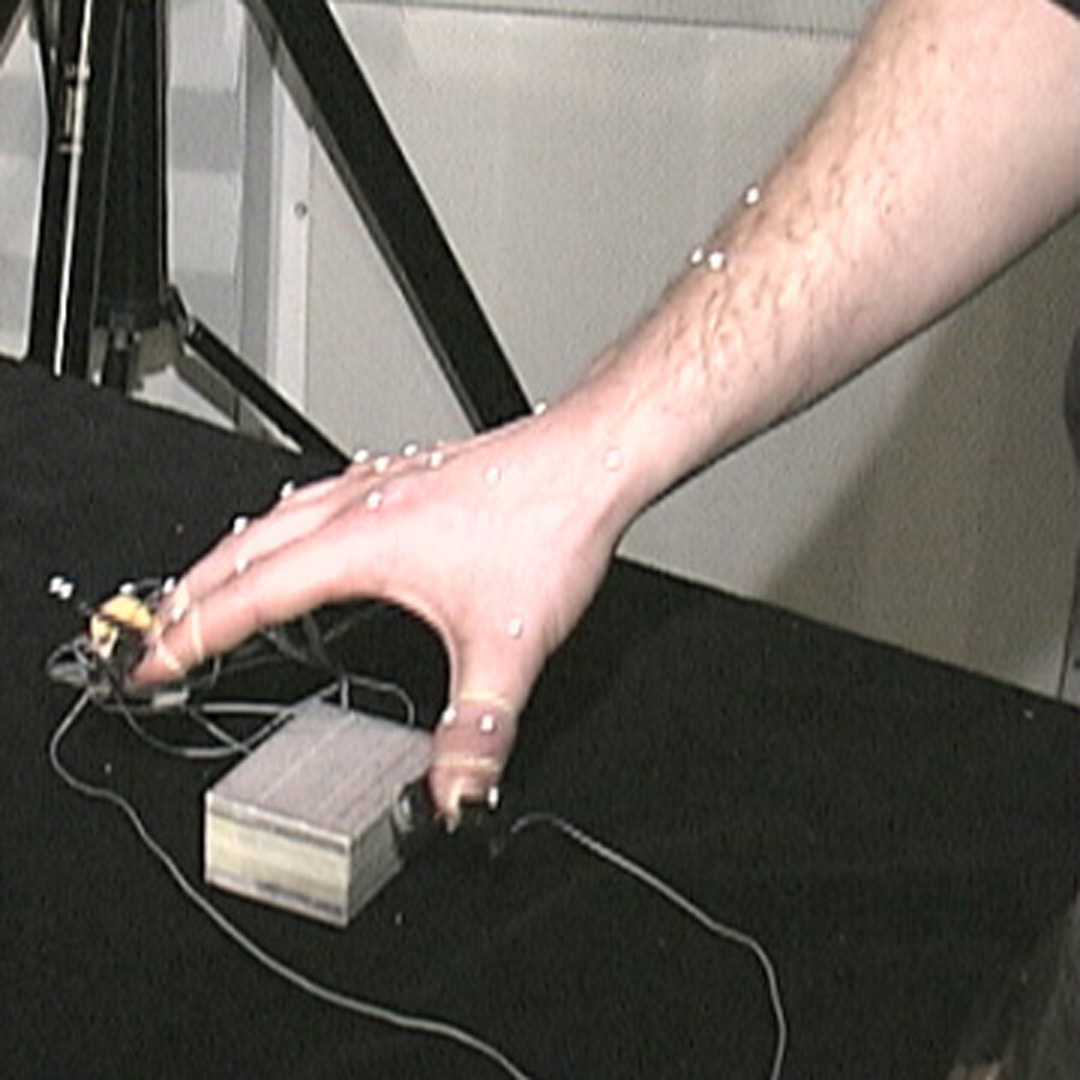
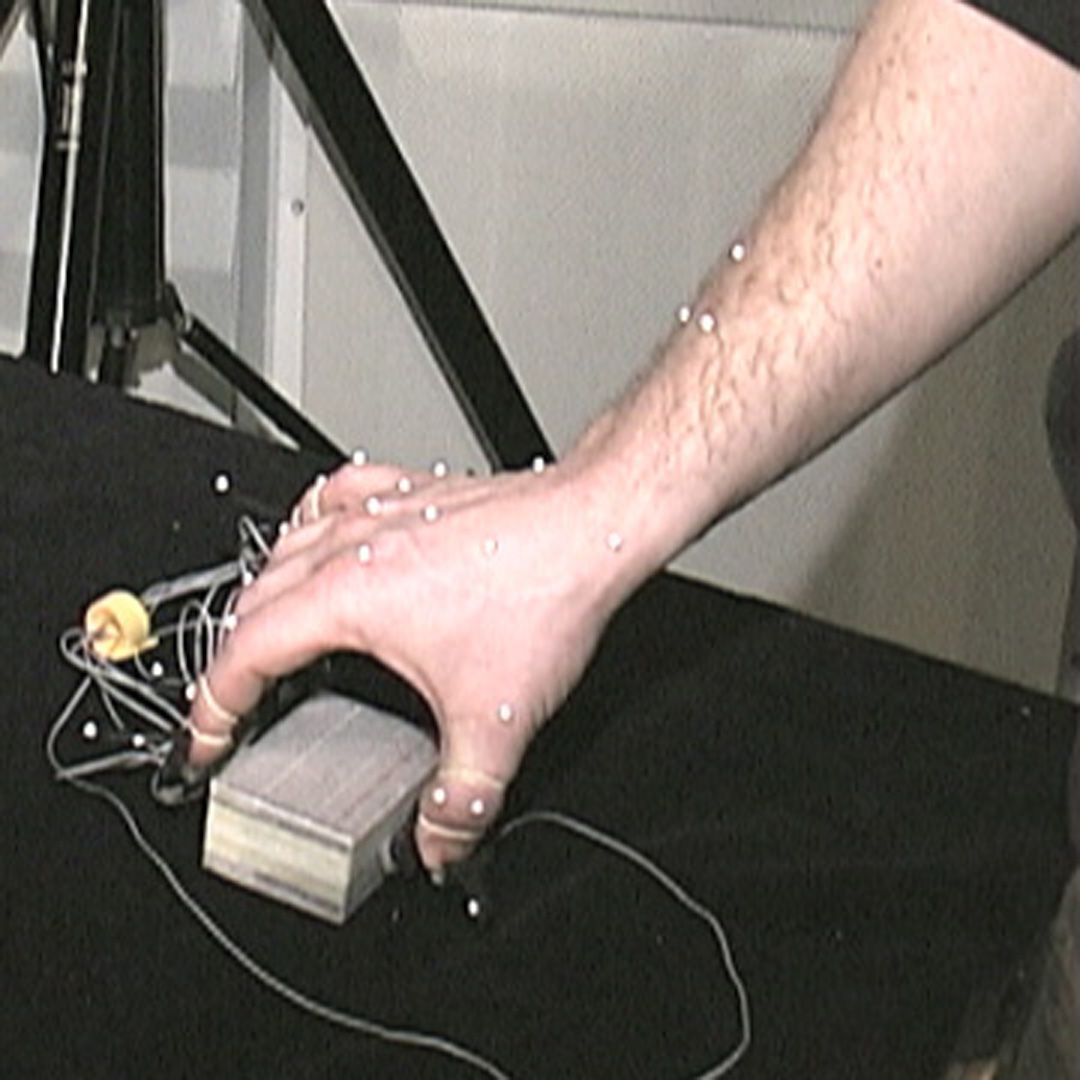
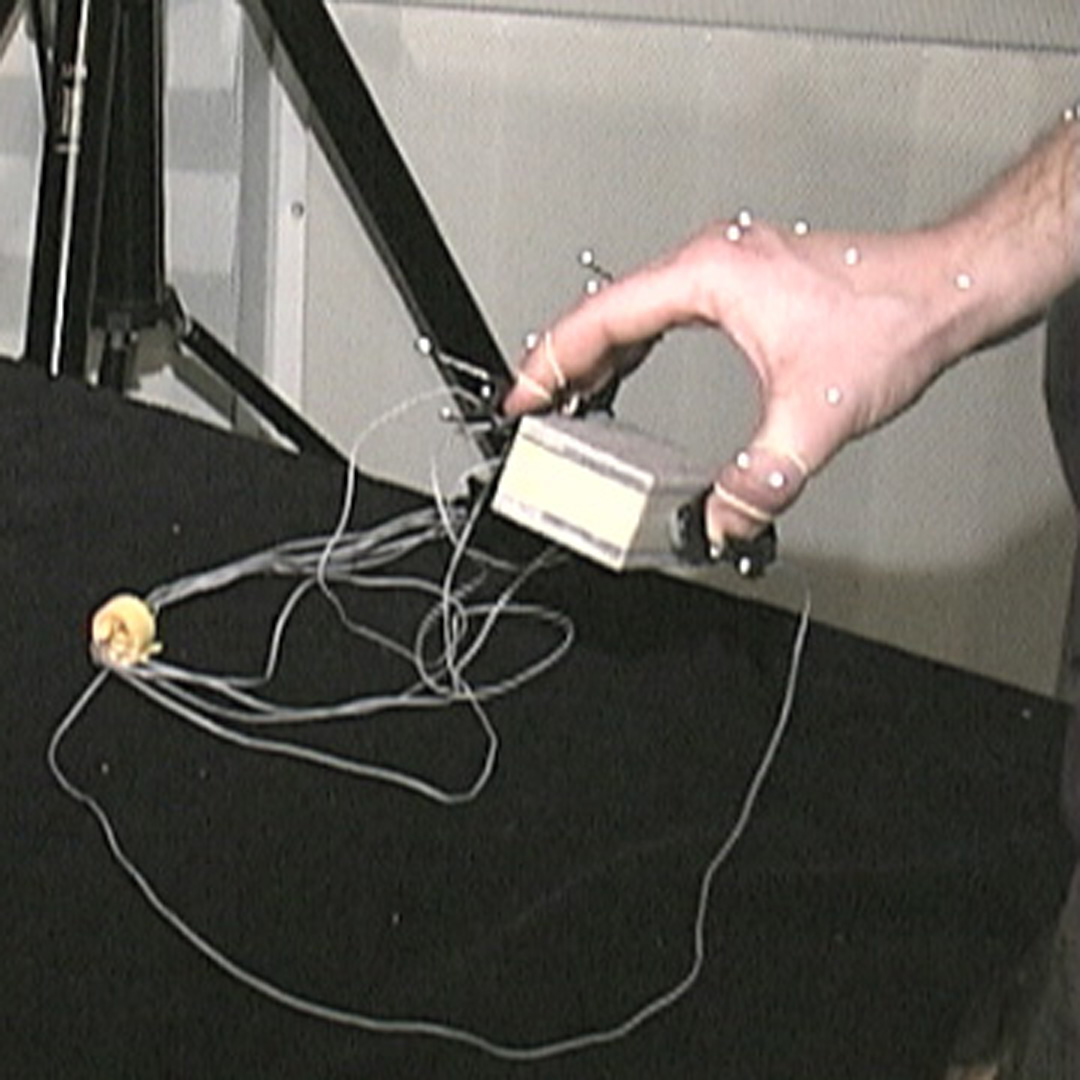
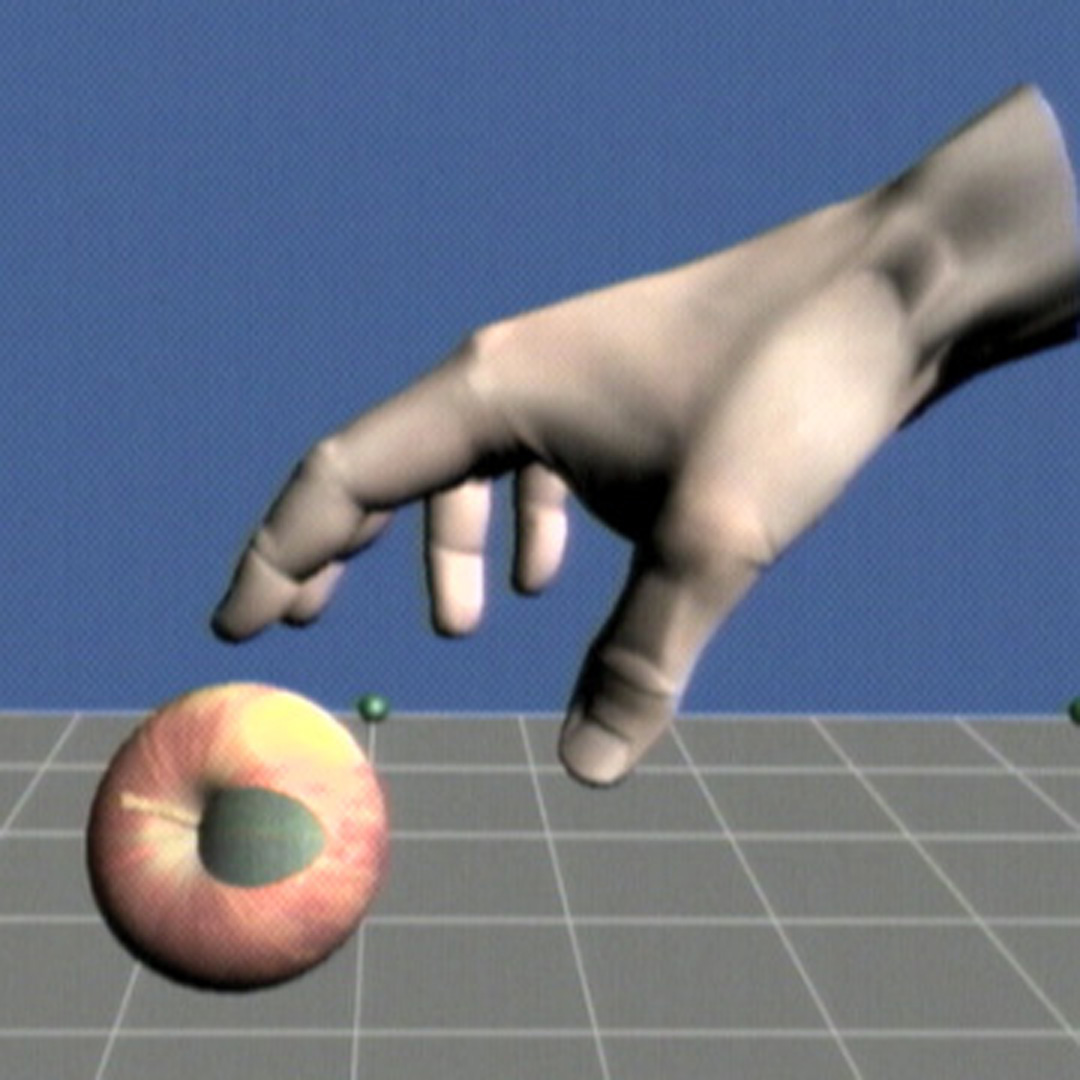
Our goal is the synthesis of new motion, which is both natural and physically valid, from captured interaction. In this sketch we describe how we achieve this using a Vicon motion capture system augmented with inexpensive force sensors, combined with a technique for retargeting interaction through simulation. Although the ideas used in our approach are general, this work focuses on hands since grasping and manipulation are arguably the most important forms of interaction.
References:
Hogan, N. 1984. An organizing principle for a class of voluntary movements. Journal of Neuroscience 4, 2745–2754.
Milner, T. E., and Franklin, D. W. 1998. Characterization of multijoint finger stiffness: Dependence on finger posture and force direction. IEEE Transactions on Biomedical Engineering 45, 11 (November), 1363–1375.