
“Immersive-Labeler: Immersive Annotation of Large-scale 3D Point Clouds in Virtual Reality” by Doula, Güdelhöfer, Mativiienko, Mühlhäuser and Guinea
Conference:
Type(s):
Title:
- Immersive-Labeler: Immersive Annotation of Large-scale 3D Point Clouds in Virtual Reality
Presenter(s)/Author(s):
Entry Number:
- 27
Abstract:
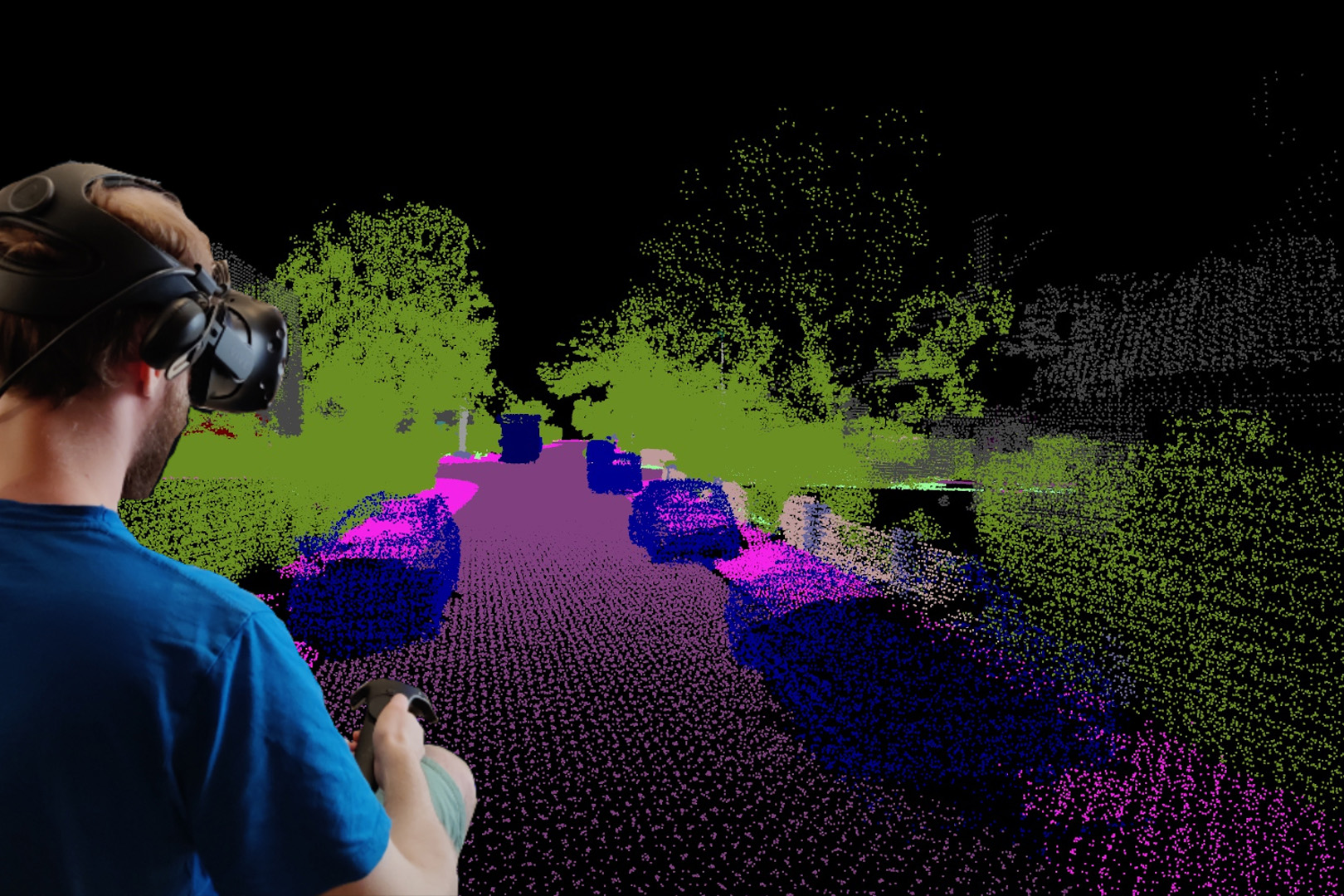
We present Immersive-Labeler, an environment for the annotation of large-scale 3D point cloud scenes of urban environments. Our concept is based on the full immersion of the user in a VR-based environment that represents the 3D point cloud scene while offering adapted visual aids and intuitive interaction and navigation modalities. Through a user-centric design, we aim to improve the annotation experience and thus reduce its costs. For the preliminary evaluation of our environment, we conduct a user study (N=20) to quantify the effect of higher levels of immersion in combination with the visual aids we implemented on the annotation process. Our findings reveal that higher levels of immersion combined with object-based visual aids lead to a faster and more engaging annotation process.
References:
Florian Wirth, Jannik Quehl, Jeffrey Ota, and Christoph Stiller. 2019. Pointatme: efficient 3d point cloud labeling in virtual reality. In 2019 IEEE Intelligent Vehicles Symposium (IV). IEEE, 1693–1698.Google ScholarDigital Library
Walter Zimmer, Akshay Rangesh, and Mohan Trivedi. 2019. 3d bat: A semi-automatic, web-based 3d annotation toolbox for full-surround, multi-modal data streams. In 2019 IEEE Intelligent Vehicles Symposium (IV). IEEE, 1816–1821.Google ScholarDigital Library