
“Haptic Rendering of Interaction between Textured Models” by Otaduy, Jain and Sud
Conference:
Type:
Title:
- Haptic Rendering of Interaction between Textured Models
Presenter(s)/Author(s):
Abstract:
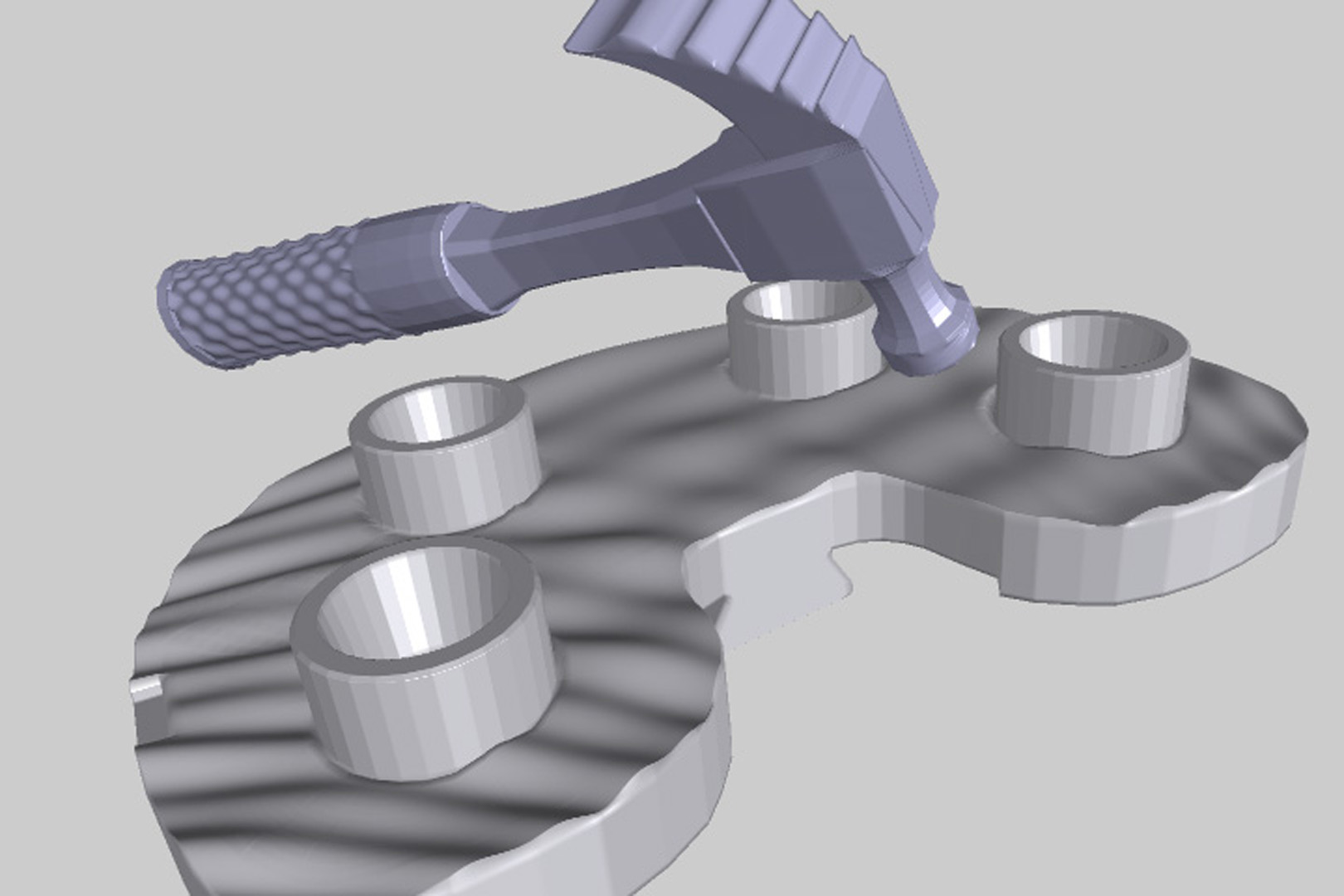
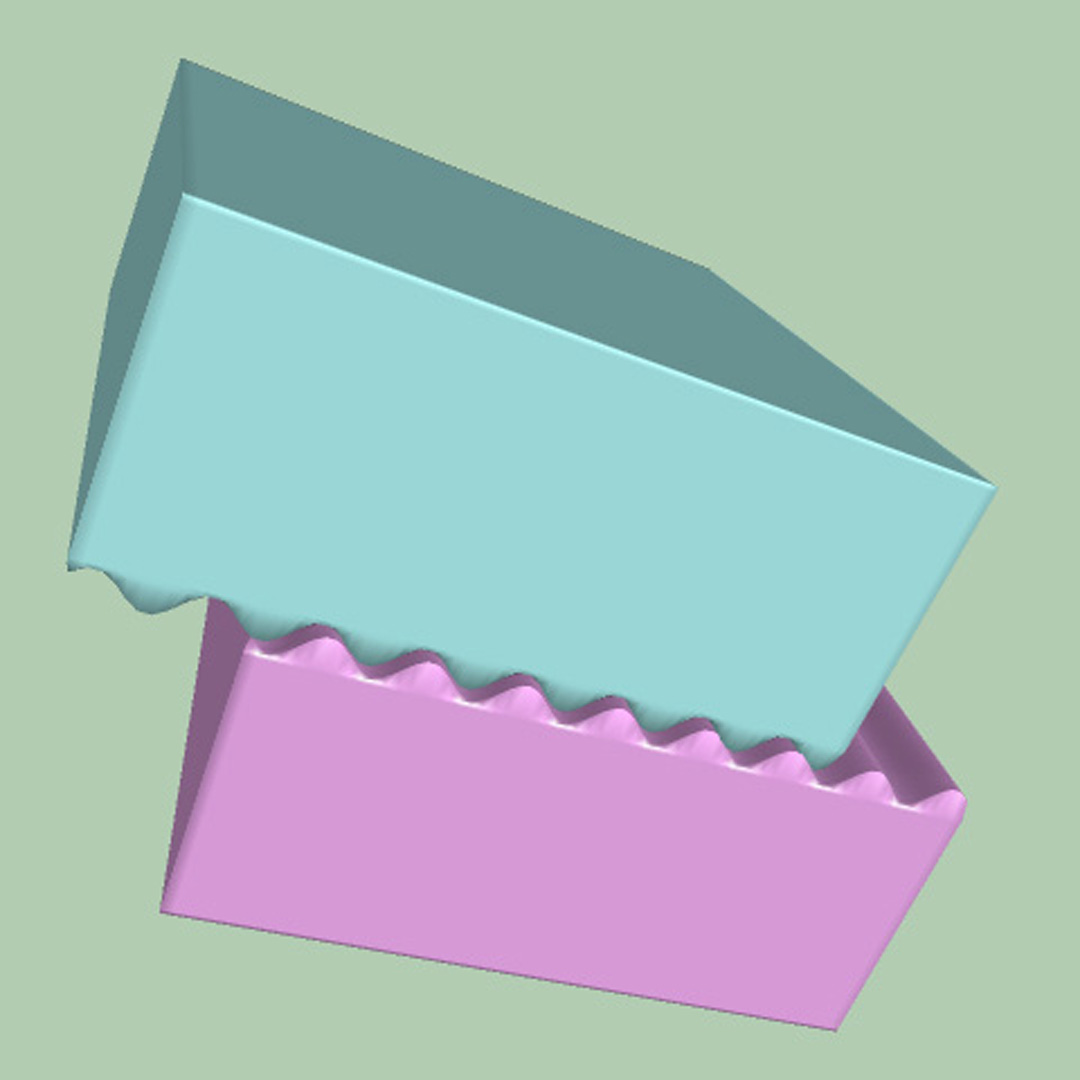
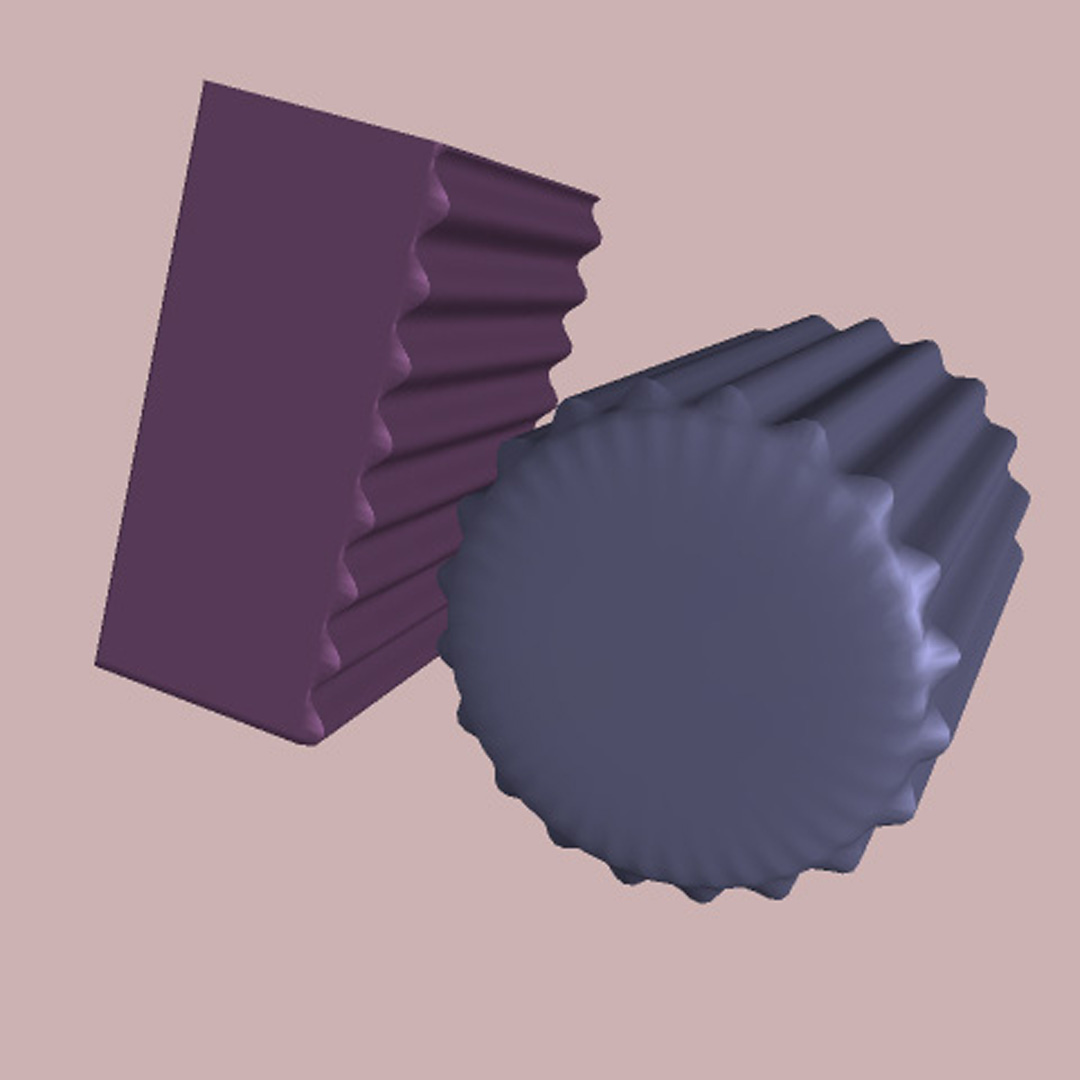
Haptic rendering of forces and torques between interacting objects, also known as 6 degree-of-freedom (DoF) haptics, has been demonstrated to improve task performance in applications such as molecular docking, nanomanipulation, medical training, and mechanical assembly in virtual prototyping. Moreover, surface texture can pro- vide a compelling cue to object identity and strongly influences the forces that must be applied in manipulation [Klatzky and Lederman 2002]. However, up to date haptic rendering of texture effects has been limited to the case of point-object interaction. Previous techniques for 6-DoF haptic rendering, such as [McNeely et al. 1999], could not capture high-frequency geometric detail, due to voxelization and point sampling limitations. Otaduy and Lin [2003] pro- posed a technique that selected object resolution adaptively at each contact. This approach also filtered high resolution geometric detail, thus texture effects were completely ignored.
References:
Klatzky, R., and Lederman, S. 2002. Perceiving texture through a probe. In Touch in Virtual Environments, M. L. McLaughlin, J. P. Hespanha, and G. S. Sukhatme, Eds. Prentice Hall PTR, Upper Saddle River, NJ, ch. 10, 180–193.]]
McNeely, W., Puterbaugh, K., and Troy, J. 1999. Six degree-of-freedom haptic rendering using voxel sampling. Proc. of ACM SIGGRAPH, 401–408.]]
Otaduy, M. A., and Lin, M. C. 2003. Sensation preserving simplification for haptic rendering. Proc. of ACM SIGGRAPH.]]