
“Haptic deformation using graphics hardware and kd-trees” by Lee, Kim, Park, Lee and Ryu
Conference:
Type(s):
Title:
- Haptic deformation using graphics hardware and kd-trees
Presenter(s)/Author(s):
Abstract:
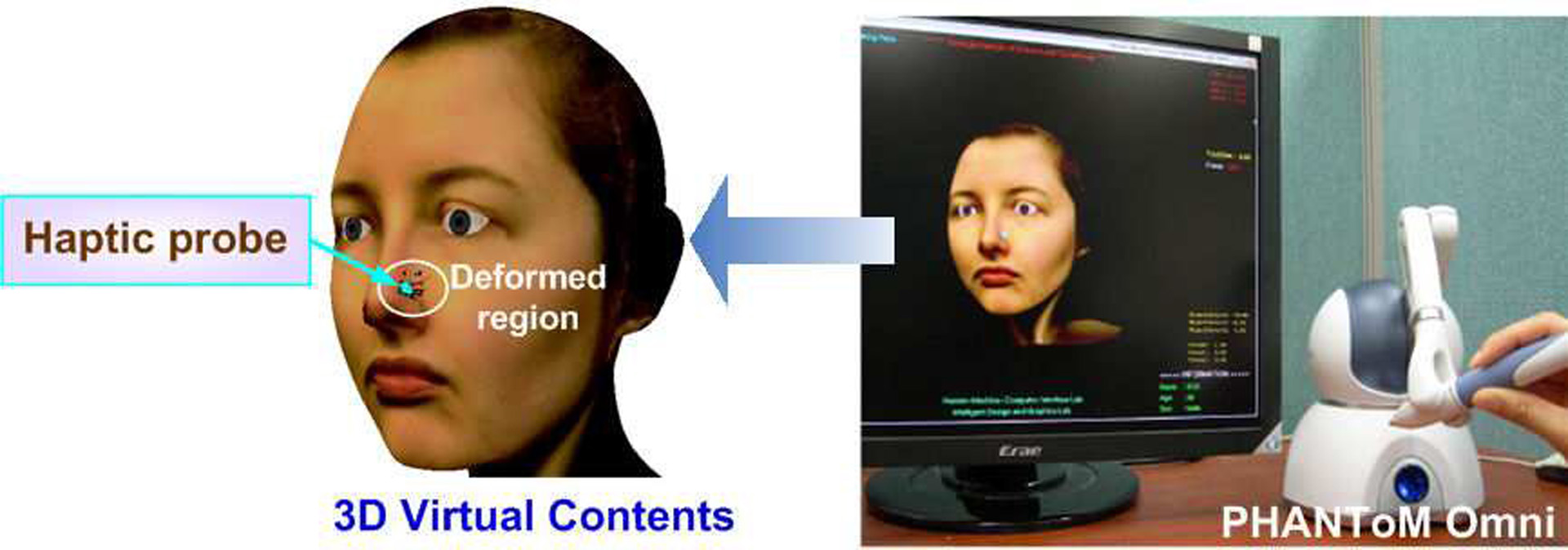
In this paper, we describe a haptic deformation algorithm using graphics hardware and spatial partitioning data structure. Since object-based collision detection methods are generally dependent on the geometrical structure of objects, these are not fast enough for deformable objects. Thus Z-buffer depth comparison using graphics hardware is used for detecting collision between a haptic probe and an object. In order to determine what region to deform in response to a user’s actions, we adopted a nearest neighbor search algorithm based on a kd-tree structure [Moore. 1991]. At the same time, the reaction force to be presented to the user is calculated in the haptic rendering loop. To compute response force for object’s deformation, mass-spring methods are utilized. Where masses are assigned to vertices and a set of springs are allocated to connect vertices.
References:
1. J. P. Kim and J. Ryu, “Hardware Based 2.5D Haptic Rendering Algorithm using Localized Occupancy Map Instance”, ICAT, pp. 132–137, 2004.
2. Andrew Moore, “An introductory tutorial on kd-trees”, PhD. Thesis, Technical Report No. 209, Computer Laboratory, University of Cambridge, 1991.