
“Feature-based locomotion controllers” by De Lasa, Mordatch and Hertzmann
Conference:
Type(s):
Title:
- Feature-based locomotion controllers
Presenter(s)/Author(s):
Abstract:
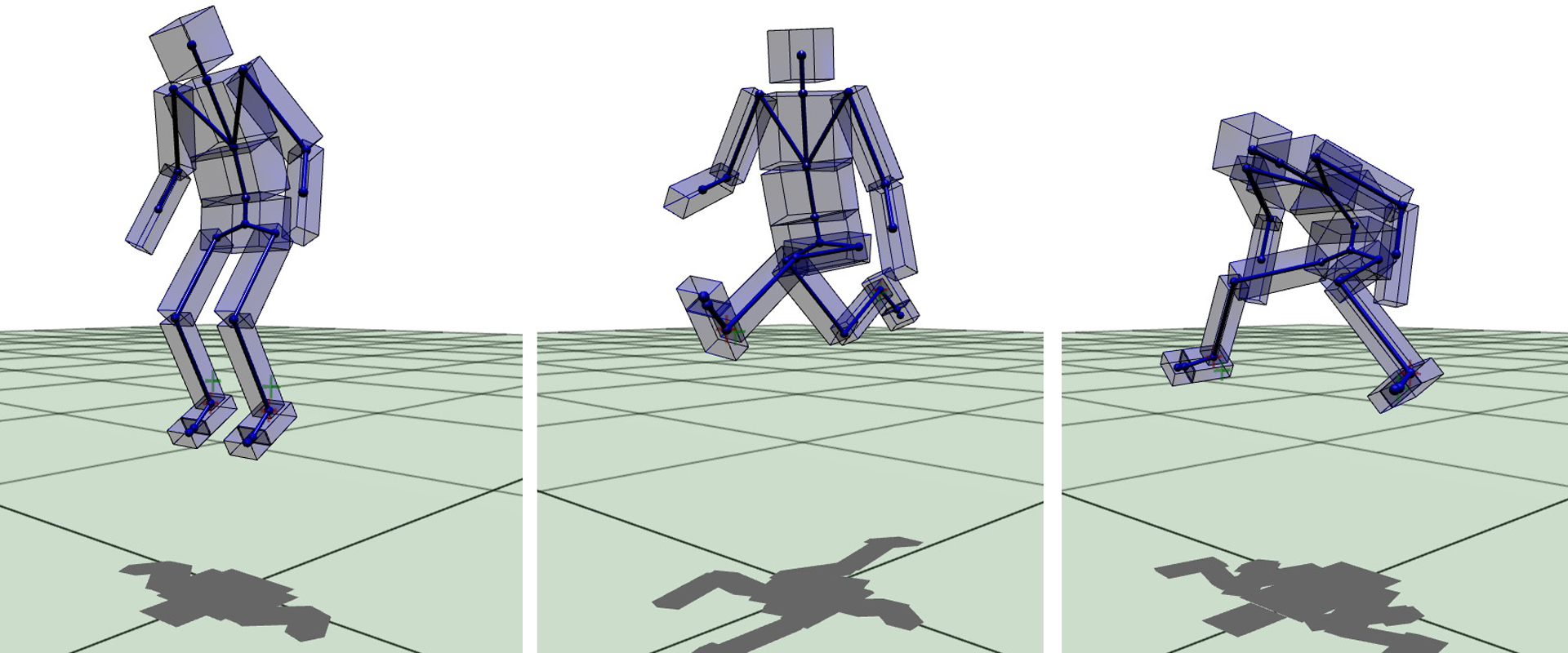
This paper introduces an approach to control of physics-based characters based on high-level features of movement, such as center-of-mass, angular momentum, and end-effectors. Objective terms are used to control each feature, and are combined by a prioritization algorithm. We show how locomotion can be expressed in terms of a small number of features that control balance and end-effectors. This approach is used to build controllers for human balancing, standing jump, and walking. These controllers provide numerous benefits: human-like qualities such as arm-swing, heel-off, and hip-shoulder counter-rotation emerge automatically during walking; controllers are robust to changes in body parameters; control parameters and goals may be modified at run-time; control parameters apply to intuitive properties such as center-of-mass height; and controllers may be mapped onto entirely new bipeds with different topology and mass distribution, without modifications to the controller itself. No motion capture or off-line optimization process is used.
References:
1. Abe, Y., and Popović, J. 2006. Interactive Animation of Dynamic Manipulation. In Proc. SCA, 195–204. Google ScholarDigital Library
2. Abe, Y., da Silva, M., and Popović, J. 2007. Multiobjective Control with Frictional Contacts. In Proc. SCA, 249–258. Google ScholarDigital Library
3. Adamczyk, P. G., Collins, S. H., and Kuo, A. D. 2006. The advantages of a rolling foot in human walking. J. Experimental Biology 209, 20, 3953–3963.Google ScholarCross Ref
4. Azevedo, C., Poignet, P., and Espiau, B. 2002. Moving horizon control for biped robots without reference trajectory. In Int. Conf. Robotics and Automation, 2762–2767.Google Scholar
5. Baerlocher, P., and Boulic, R. 2004. An inverse kinematics architecture enforcing an arbitrary number of strict priority levels. The Visual Computer 20, 6, 402–417. Google ScholarDigital Library
6. Baraff, D. 1994. Fast contact force computation for nonpenetrating rigid bodies. In Proc. SIGGRAPH, 23–34. Google ScholarDigital Library
7. da Silva, M., Abe, Y., and Popović, J. 2008. Interactive Simulation of Stylized Human Locomotion. ACM Trans. Graphics 27, 3, 82. Google ScholarDigital Library
8. da Silva, M., Yeuhi, A., and Popović, J. 2008. Simulation of Human Motion Data using Short-Horizon Model-Predictive Control. Computer Graphics Forum 27, 2, 371–380.Google ScholarCross Ref
9. de Lasa, M., and Hertzmann, A. 2009. Prioritized Optimization for Task-Space Control. In Proc. IROS. Google ScholarDigital Library
10. Faloutsos, P., van de Panne, M., and Terzopoulos, D. 2001. Composable Controllers for Physics-Based Character Animation. In Proc. SIGGRAPH, 251–260. Google ScholarDigital Library
11. Fang, A. C., and Pollard, N. S. 2003. Efficient synthesis of physically valid human motion. ACM Trans. Graphics, 417–426. Google ScholarDigital Library
12. Featherstone, R. 2008. Rigid Body Dynamics Algorithms. Springer-Verlag. Google ScholarDigital Library
13. Fujimoto, Y., Obata, S., and Kawamura, A. 1998. Robust biped walking with active interaction control between foot and ground. In Int. Conf. Robotics and Automation, 2030–2035.Google Scholar
14. Guendelman, E., Bridson, R., and Fedkiw, R. 2003. Non-convex Rigid Bodies with Stacking. ACM Trans. Graphics 22, 3, 871–878. Google ScholarDigital Library
15. Herr, H., and Popovic, M. 2008. Angular momentum in human walking. J. Experimental Biology 211, 467–481.Google ScholarCross Ref
16. Hodgins, J. K., and Pollard, N. S. 1997. Adapting Simulated Behaviors for New Characters. In Proc. SIGGRAPH, 153–162. Google ScholarDigital Library
17. Hodgins, J. K., Wooten, W. L., Brogan, D. C., and O’Brien, J. F. 1995. Animating human athletics. In Proc. SIGGRAPH, 71–78. Google ScholarDigital Library
18. Hsu, P., Mauser, J., and Sastry, S. 1989. Dynamic control of redundant manipulators. J. Robotic Systems 6, 2, 133–148.Google ScholarCross Ref
19. Jain, S., Ye, Y., and Liu, C. K. 2009. Optimization-Based Interactive Motion Synthesis. ACM Trans. Graphics 28, 1, 1–10. Google ScholarDigital Library
20. Kanoun, O., Lamiraux, F., Wieber, P.-B., Kanehiro, F., Yoshida, E., and Laumond, J.-P. 2009. Prioritizing linear equality and inequality systems: application to local motion planning for redundant robots. In Int. Conf. Robotics and Automation, 724–729. Google ScholarDigital Library
21. Khatib, O. 1987. A Unified Approach to Motion and Force Control of Robot Manipulators: The Operational Space Formulation. J. Robotics and Automation 3, 1, 43–53.Google ScholarCross Ref
22. Kudoh, S., Komura, T., and Ikeuchi, K. 2006. Stepping Motion for a Human-like Character to Maintain Balance against Large Perturbations. In Int. Conf. Robotics and Automation, 2661–2666.Google Scholar
23. Laszlo, J., van de Panne, M., and Fiume, E. 1996. Limit cycle control and its application to the animation of balancing and walking. In Proc. SIGGRAPH 1996, 155–162. Google ScholarDigital Library
24. Liegeois, A. 1977. Automatic supervisory control of the configuration and behavior of multibody mechanisms. Trans. on Systems, Man and Cybernetics 7, 12, 868–871.Google ScholarCross Ref
25. Macchietto, A., Zordan, V., and Shelton, C. 2009. Momentum Control for Balance. ACM Trans. Graphics 28, 3, 80. Google ScholarDigital Library
26. Mansard, N., and Khatib, O. 2008. Continuous control law from unilateral constraints. In Int. Conf. Robotics and Automation, 3359–3364.Google Scholar
27. Marler, R. T., and Arora, J. S. 2004. Survey of multi-objective optimization methods for engineering. Structural and Multidisciplinary Optimization 26, 6, 369–395.Google ScholarCross Ref
28. Mordatch, I., de Lasa, M., and Hertzmann, A. 2010. Robust Physics-Based Locomotion Using Low-Dimensional Planning. ACM Trans. Graphics 29, 3. Google ScholarDigital Library
29. Muico, U., Lee, Y., Popović, J., and Popović, Z. 2009. Contact-aware Nonlinear Control of Dynamic Characters. ACM Trans. Graphics 28, 3, 81. Google ScholarDigital Library
30. Nakamura, Y., Hanafusa, H., and Yoshikawa, T. 1987. Task-Priority Based Redundancy Control of Robot Manipulators. Int. J. Robotics Research 6, 2. Google ScholarDigital Library
31. Nakanishi, J., Cory, R., Mistry, M., Peters, J., and Schaal, S. 2008. Operational Space Control: A Theoretical and Empirical Comparison. Int. J. Robotics Research 27, 6. Google ScholarDigital Library
32. Orin, D., and Goswami, A. 2008. Centroidal Momentum Matrix of a Humanoid Robot: Structure and Propreties. In Int. Conf. on Robotics and Intelligent Systems.Google Scholar
33. Popovic, M., Hofmann, A., and Herr, H. 2004. Angular Momentum Regulation during Human Walking: Biomechanics and Control. In Int. Conf. Robotics and Automation.Google Scholar
34. Pozzo, T., Berthoz, A., and Lefort, L. 1990. Head stabilization during various locomotor tasks in humans. Exp. Brain Res. 82, 97–106.Google ScholarCross Ref
35. Pratt, J., Chew, C.-M., Torres, A., Dilworth, P., and Pratt, G. 2001. Virtual Model Control: An intuitive approach for bipedal locomotion. Int. J. Robotics Research.Google Scholar
36. Raibert, M. H., and Hodgins, J. K. 1991. Animation of dynamic legged locomotion. SIGGRAPH Comput. Graph. 25, 4, 349–358. Google ScholarDigital Library
37. Sentis, L. 2007. Synthesis and Control of Whole-Body Behaviors in Humanoid Systems. PhD thesis, Stanford. Google ScholarDigital Library
38. Sharon, D., and van de Panne, M. 2005. Synthesis of Controllers for Stylized Planar Bipedal Walking. In Int. Conf. Robotics and Automation, 2387–2392.Google Scholar
39. Shkolnik, A., and Tedrake, R. 2008. High-Dimensional Underactuated Motion Planning via Task Space Control. Int. Conf. on Robotics and Intelligent Systems, 3762–3768.Google Scholar
40. Sok, K. W., Kim, M., and Lee, J. 2007. Simulating Biped Behaviors from Human Motion Data. ACM Trans. Graphics 26, 3, 107. Google ScholarDigital Library
41. Todorov, E., and Jordan, M. I. 2002. Optimal feedback control as a theory of motor coordination. Nature Neuroscience 5, 11, 1226–1235.Google ScholarCross Ref
42. Wang, J. M., Fleet, D. J., and Hertzmann, A. 2009. Optimizing Walking Controllers. ACM Trans. Graphics 28, 5, 168. Google ScholarDigital Library
43. Winter, D. A. 2004. Biomechanics and Motor Control of Human Movement, 3rd ed. Wiley.Google Scholar
44. Wooten, W. 1998. Simulation of Leaping, Tumbling, Landing, and Balancing Humans. PhD thesis, Georgia Institute of Technology. Google ScholarDigital Library
45. Yin, K., Loken, K., and van de Panne, M. 2007. SIMBICON: Simple Biped Locomotion Control. ACM Trans. Graphics 26, 3, 81. Google ScholarDigital Library
46. Zordan, V., and Hodgins, J. K. 2002. Motion capture-driven simulations that hit and react. In Proc. SCA, 89–96. Google ScholarDigital Library