
“Environment-Adaptive Contact Poses for Virtual Characters” by Kang, Yoon, Do and Lee
Conference:
Type(s):
Title:
- Environment-Adaptive Contact Poses for Virtual Characters
Presenter(s)/Author(s):
Entry Number:
- 42
Abstract:
A virtual character that exhibits natural poses in relation to various items of furniture of arbitrary shape will give the impression of being able to perceive space. Recently, Liu et al. [2010] developed a physics-based animation technique that generates motions involving complex contacts with an environment, such as rolling. Lin et al. [2012] developed a novel framework using a sketching interface in which a user draws a target pose as a two-dimensional stick figure and determining a suitable three-dimensional pose with the genetic algorithm and gradient based optimization solver.
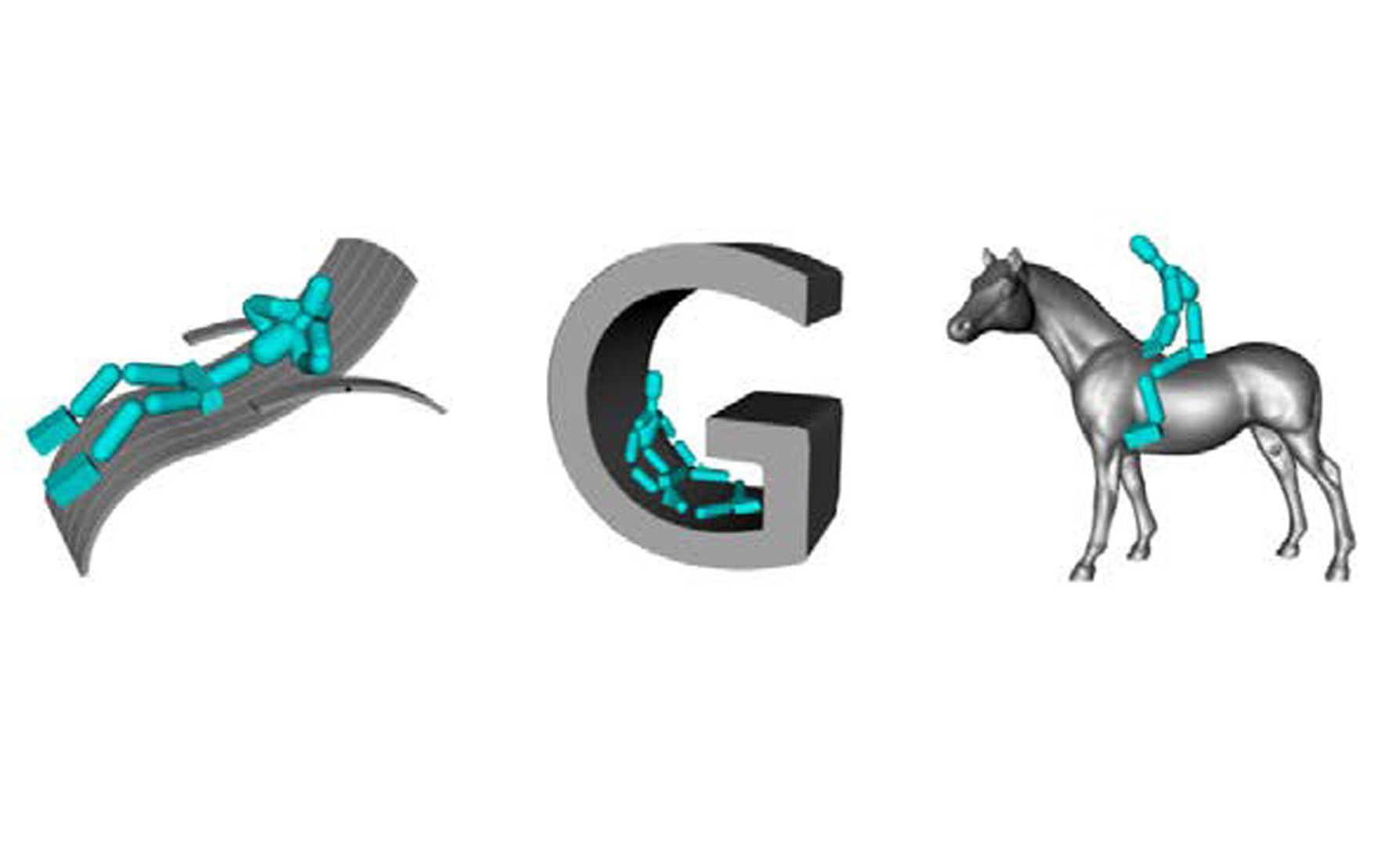
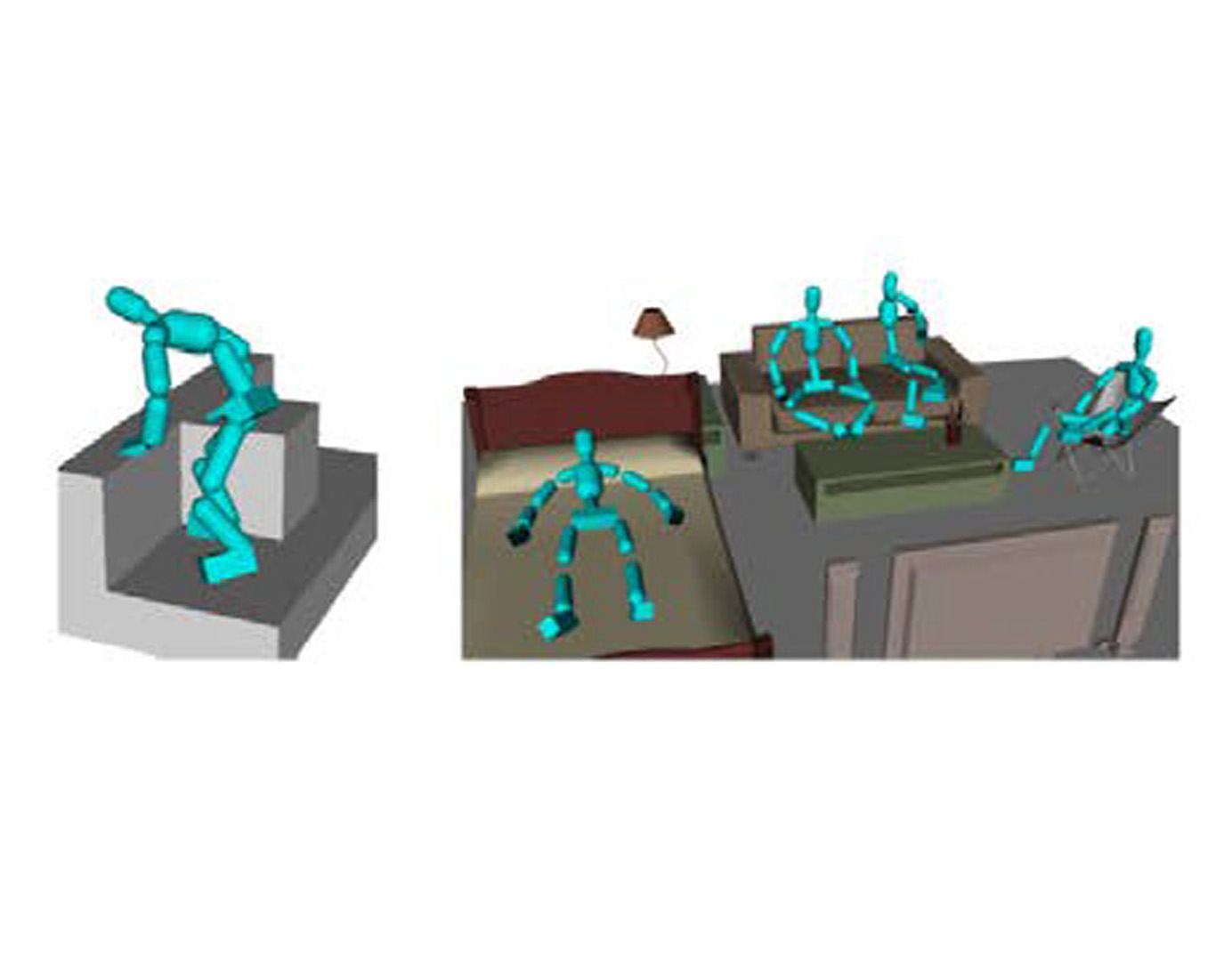
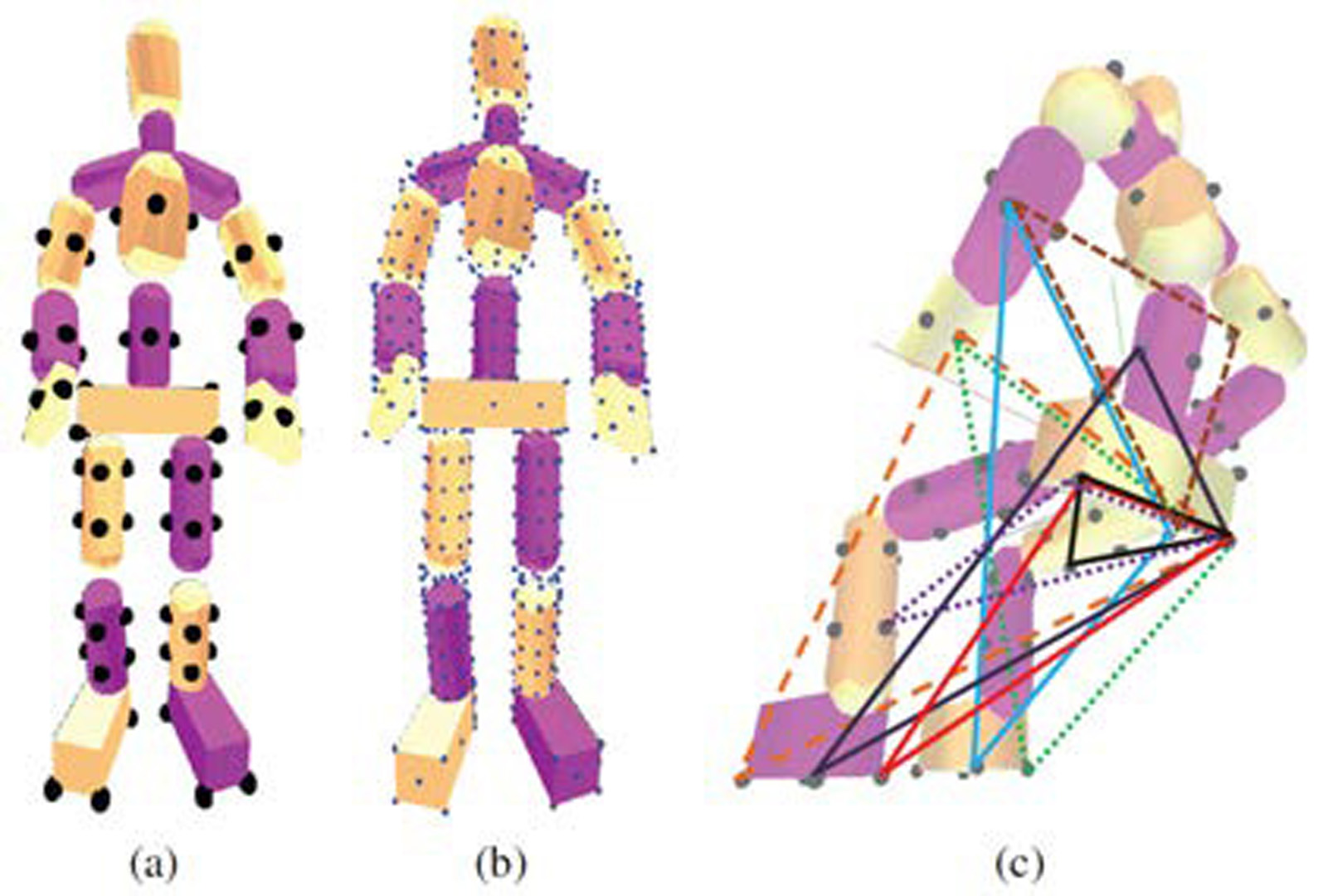
We develop a novel method that automatically finds various candidate poses suitable to the target environment and lets a user select the preferred pose. Given the user-specified location and direction, our method computes the potential support contacts for the character in the surrounding geometry of the environment and generates a set of stable poses that contact-rich and penetrationfree. Our method allows for creating various contact poses including lying and standing poses.
References:
- Liu, L., Yin, K., Van De Panne M., Shao, T., and Xu, W. 2010. Sampling based contact-rich motion control. ACM Trans. Graph. 29, 4 (July), 128:1–128:10.
- Lin, J., Igarashi, T., Mitani, J., Liao, M., and He, Y. 2012. A sketching Interface for sitting pose design in the virtual environment. IEEE Transactions on Visualization and Computer Graphics 18, 11, 1979–1991.