
“Domain of Attraction Expansion for Physics-Based Character Control” by Panne, Borno and Fiume
Conference:
Type(s):
Title:
- Domain of Attraction Expansion for Physics-Based Character Control
Session/Category Title: Human Motion
Presenter(s)/Author(s):
Moderator(s):
Abstract:
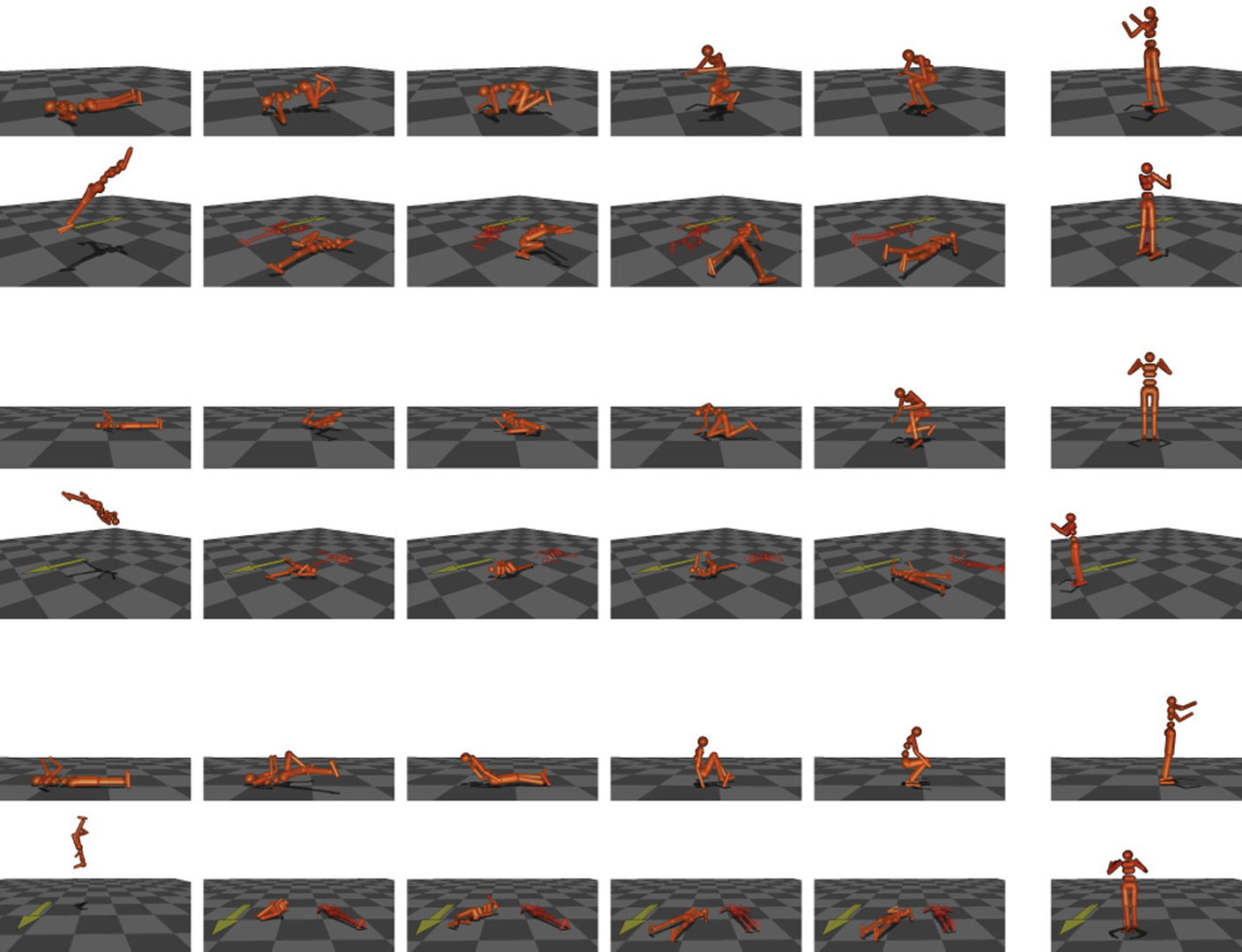
Determining effective control strategies and solutions for high-degree-of-freedom humanoid characters has been a difficult, ongoing problem. A controller is only valid for a subset of the states of the character, known as the domain of attraction (DOA). This article shows how many states that are initially outside the DOA can be brought inside it. Our first contribution is to show how DOA expansion can be performed for a high-dimensional simulated character. Our second contribution is to present an algorithm that efficiently increases the DOA using random trees that provide denser coverage than the trees produced by typical sampling-based motion-planning algorithms. The trees are constructed offline but can be queried fast enough for near-real-time control. We show the effect of DOA expansion on getting up, crouch-to-stand, jumping, and standing-twist controllers. We also show how DOA expansion can be used to connect controllers together.
References:
1. Yeuhi Abe, Marco da Silva, and Jovan Popović. 2007. Multiobjective control with frictional contacts. In Symposium on Computer Animation (SCA). Eurographics Association, 249–258.Google Scholar
2. Mazen Al Borno, Martin De Lasa, and Aaron Hertzmann. 2013. Trajectory optimization for full-body movements with complex contacts. IEEE TRans. Vis. Comput. Graph. 19, 8 (2013), 1405–1414. Google ScholarDigital Library
3. Mazen Al Borno, Eugene Fiume, A. Hertzmann, and M. de Lasa. 2014. Feedback control for rotational movements in feature space. In Computer Graphics Forum, Vol. 33. Wiley Online Library, 225–233.Google Scholar
4. Chris Atkeson and Benjamin Stephens. 2008. Random sampling of states in dynamic programming. In Advances in Neural Information Processing Systems. 33–40. Google ScholarDigital Library
5. Michael S. Branicky, Steven M. LaValle, Kari Olson, and Libo Yang. 2001. Quasi-randomized path planning. In International Conference on Robotics and Automation (ICRA), Vol. 2. IEEE, 1481–1487. Google ScholarCross Ref
6. Stelian Coros, Philippe Beaudoin, and Michiel van de Panne. 2010. Generalized biped walking control. ACM Trans. Graph. 29, 4 (2010), 130. Google ScholarDigital Library
7. Petros Faloutsos, Michiel Van de Panne, and Demetri Terzopoulos. 2001. Composable controllers for physics-based character animation. ACM Trans. Graph. (2001), 251–260. Google ScholarDigital Library
8. Martin Felis and Katja Mombaur. 2016. Synthesis of full-body 3-D human gait using optimal control methods. In IEEE International Conference on Robotics and Automation (ICRA). IEEE, 1560–1566. Google ScholarCross Ref
9. Michael Firmin and Michiel van de Panne. 2015. Controller design for multi-skilled bipedal characters. In Computer Graphics Forum, Vol. 34. Wiley Online Library, 50–63. Google ScholarDigital Library
10. Elena Glassman and Russ Tedrake. 2010. A quadratic regulator-based heuristic for rapidly exploring state space. In International Conference on Robotics and Automation (ICRA). IEEE, 5021–5028. Google ScholarCross Ref
11. Jessy W. Grizzle, Christine Chevallereau, Aaron D. Ames, and Ryan W Sinnet. 2010. 3D bipedal robotic walking: models, feedback control, and open problems. In IFAC Symposium on Nonlinear Control Systems, Vol. 2. 8. Google ScholarCross Ref
12. Sehoon Ha and C. Karen Liu. 2014. Iterative training of dynamic skills inspired by human coaching techniques. ACM Trans. Graph. 34, 1 (2014), 1. Google ScholarDigital Library
13. Perttu Hämäläinen, Sebastian Eriksson, Esa Tanskanen, Ville Kyrki, and Jaakko Lehtinen. 2014. Online motion synthesis using sequential Monte Carlo. ACM Trans. Graph. 33, 4 (2014), 51. Google ScholarDigital Library
14. Perttu Hämäläinen, Joose Rajamäki, and C. Karen Liu. 2015. Online control of simulated humanoids using particle belief propagation. ACM Trans. Graph. 34, 4 (2015), 81. Google ScholarDigital Library
15. N. Hansen. 2006. The CMA evolution strategy: A comparing review. In Towards a New Evolutionary Computation: Advances on Estimation of Distribution Algorithms. 75–102. Google ScholarCross Ref
16. Jessica K. Hodgins, Wayne L. Wooten, David C. Brogan, and James F. O’Brien. 1995. Animating human athletics. In ACM Siggraph Computer Graphics. ACM, 71–78. Google ScholarDigital Library
17. Eunjung Ju, Jungdam Won, Jehee Lee, Byungkuk Choi, Junyong Noh, and Min Gyu Choi. 2013. Data-driven control of flapping flight. ACM Trans. Graph. 32, 5 (2013), 151. Google ScholarDigital Library
18. J. Zico Kolter, Adam Coates, Andrew Y. Ng, Yi Gu, and Charles DuHadway. 2008. Space-indexed dynamic programming: Learning to follow trajectories. In International Conference on Machine Learning (ICML). ACM, 488–495. Google ScholarDigital Library
19. James J. Kuffner. 2004. Effective sampling and distance metrics for 3D rigid body path planning. In International Conference on Robotics and Automation (ICRA), Vol. 4. IEEE, 3993–3998. Google ScholarCross Ref
20. Steven M. LaValle. 1998. Rapidly-exploring random trees: A new tool for path planning. In Technical Report. Computer Science Department, Iowa State University, 11.Google Scholar
21. Steven M. LaValle and James J. Kuffner. 2001. Randomized kinodynamic planning. Int. J. Robot. Res. 20, 5 (2001), 378–400. Google ScholarCross Ref
22. Yoonsang Lee, Sungeun Kim, and Jehee Lee. 2010. Data-driven biped control. In ACM Trans. Graph., Vol. 29. ACM, 129. Google ScholarDigital Library
23. Wen-Chieh Lin and Yi-Jheng Huang. 2012. Animating rising up from various lying postures and environments. Vis. Comput. 28, 4 (2012), 413–424. Google ScholarDigital Library
24. Libin Liu, KangKang Yin, Michiel van de Panne, and Baining Guo. 2012. Terrain runner: Control, parameterization, composition, and planning for highly dynamic motions. ACM Trans. Graph. 31, 6 (2012), 154. Google ScholarDigital Library
25. Libin Liu, KangKang Yin, Michiel van de Panne, Tianjia Shao, and Weiwei Xu. 2010. Sampling-based contact-rich motion control. ACM Trans. Graph. 29, 4 (2010), 128. Google ScholarDigital Library
26. Igor Mordatch, Emanuel Todorov, and Zoran Popović. 2012. Discovery of complex behaviors through contact-invariant optimization. ACM Trans. Graph. 31, 4 (2012), 43. Google ScholarDigital Library
27. Kwang Won Sok, Manmyung Kim, and Jehee Lee. 2007. Simulating biped behaviors from human motion data. In ACM Trans. Graph., Vol. 26. ACM, 107. Google ScholarDigital Library
28. Yuval Tassa, Tom Erez, and Emanuel Todorov. 2012. Synthesis and stabilization of complex behaviors through online trajectory optimization. In International Conference on Intelligent Robots and Systems (IROS). IEEE, 4906–4913. Google ScholarCross Ref
29. Russ Tedrake. 2009. LQR-trees: Feedback motion planning on sparse randomized trees. In Proceedings of Robotics: Science and Systems (RSS).Google ScholarCross Ref
30. Emanuel Todorov, Tom Erez, and Yuval Tassa. 2012. MuJoCo: A physics engine for model-based control. In International Conference on Intelligent Robots and Systems (IROS). IEEE, 5026–5033. Google ScholarCross Ref
31. Jack M. Wang, David J. Fleet, and Aaron Hertzmann. 2010. Optimizing walking controllers for uncertain inputs and environments. ACM Trans. Graph. 29, 4 (2010). Google ScholarDigital Library
32. Andrew Witkin and Michael Kass. 1988. Spacetime constraints. In ACM Siggraph Computer Graphics, Vol. 22. ACM, 159–168. Google ScholarDigital Library
33. KangKang Yin, Kevin Loken, and Michiel van de Panne. 2007. Simbicon: Simple biped locomotion control. ACM Trans. Graph. 26, 3 (2007), 105. Google ScholarDigital Library