
“Detection and Evaluation of Grasping Positions”
Conference:
Type(s):
Title:
- Detection and Evaluation of Grasping Positions
Presenter(s)/Author(s):
Abstract:
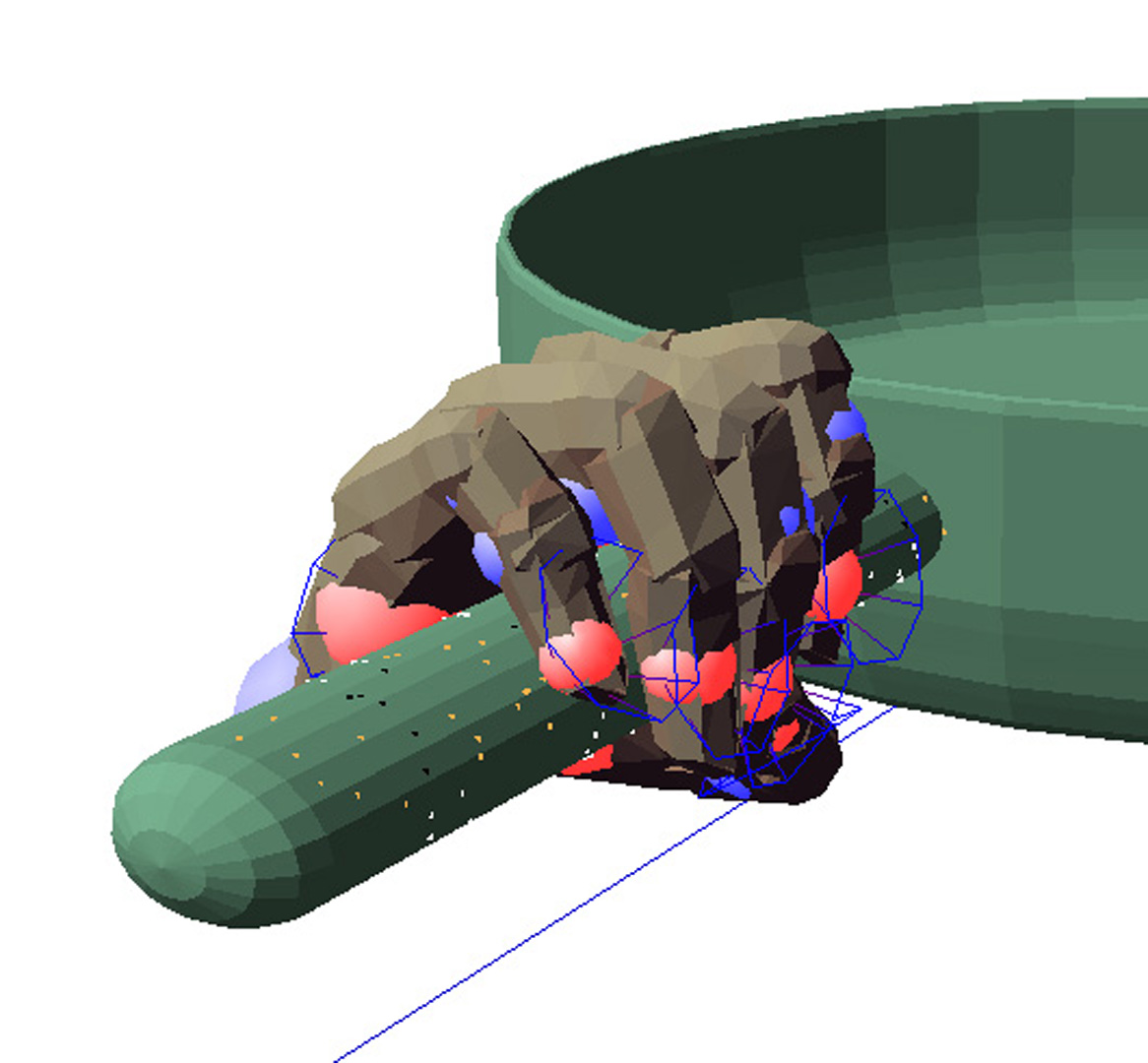
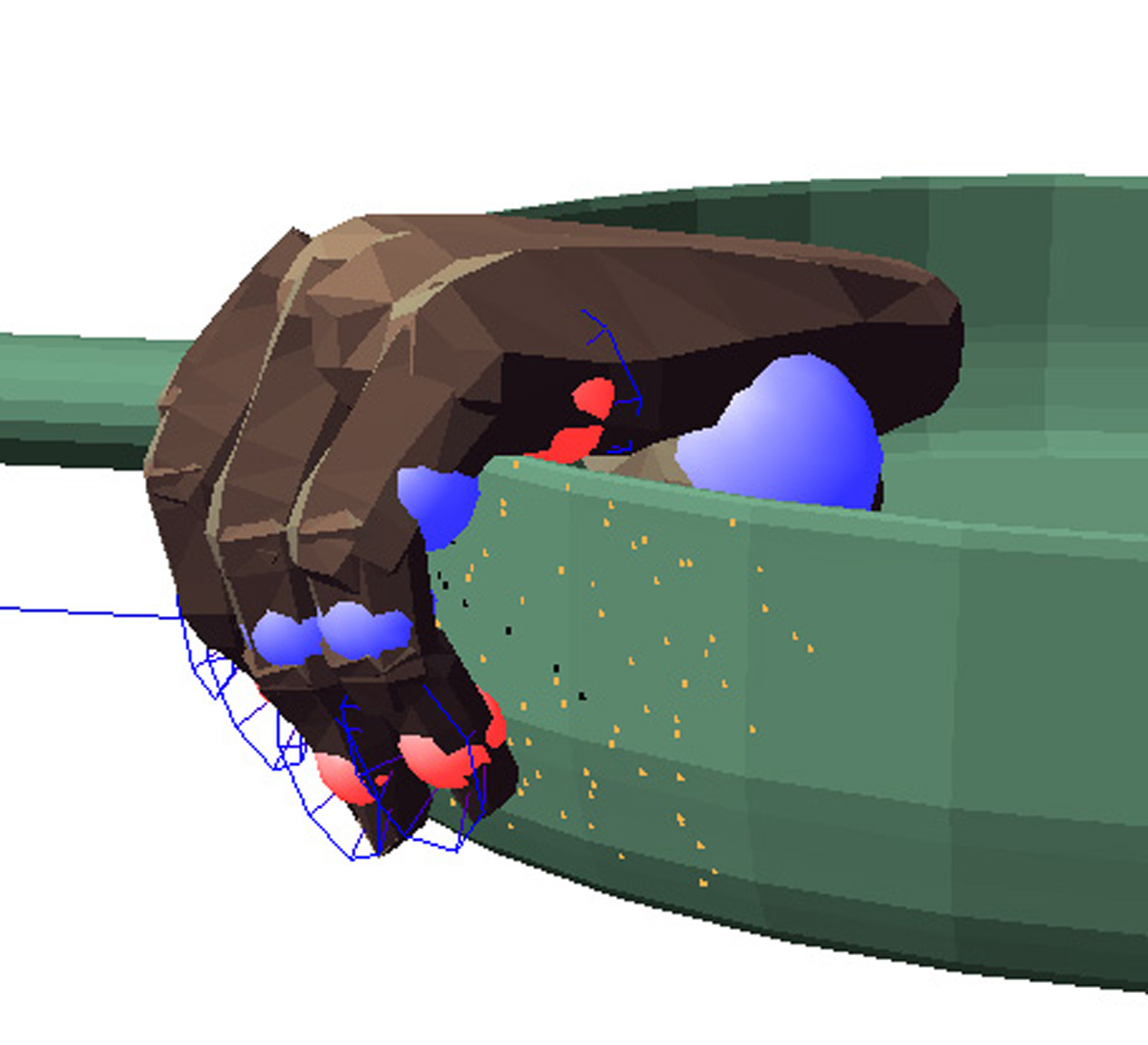
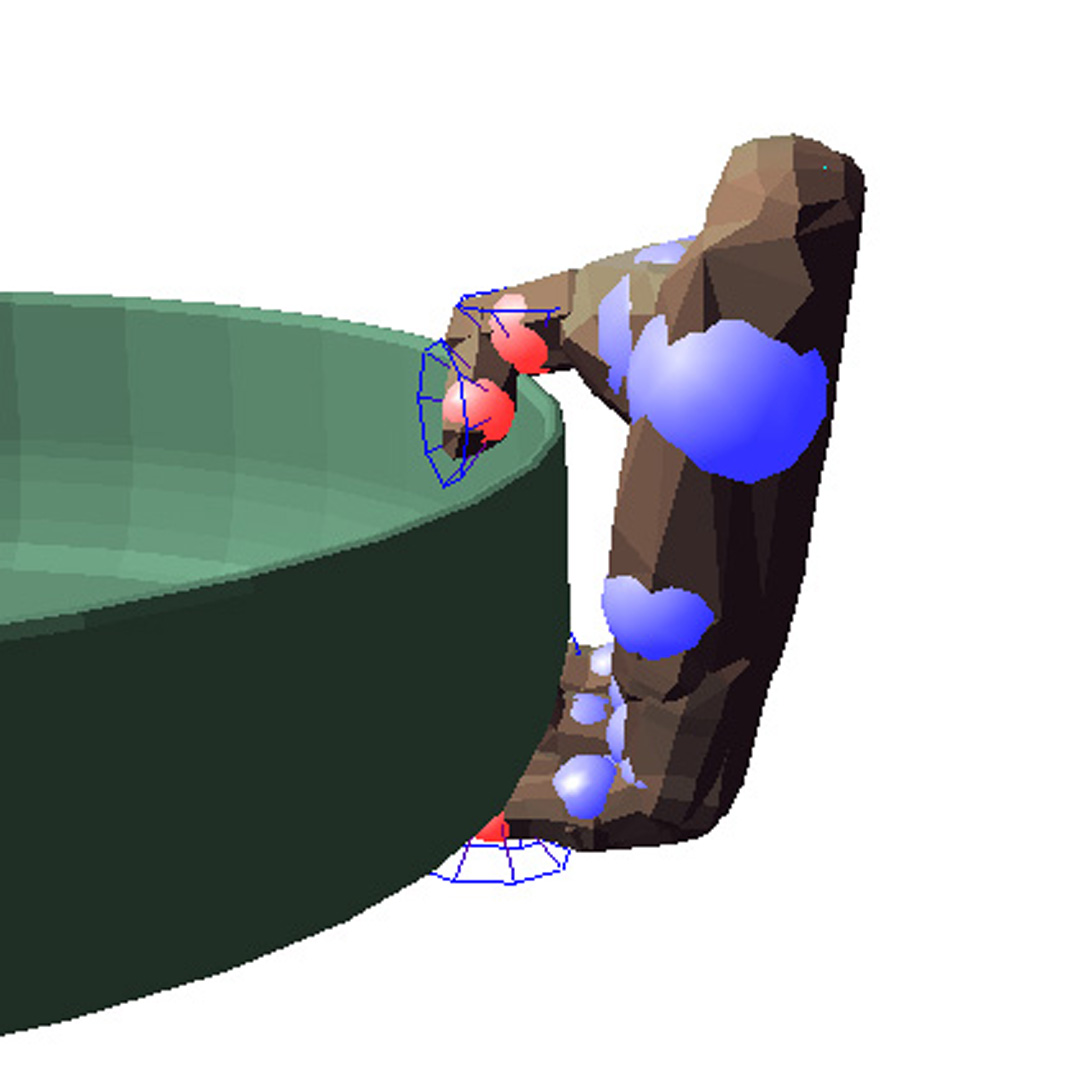
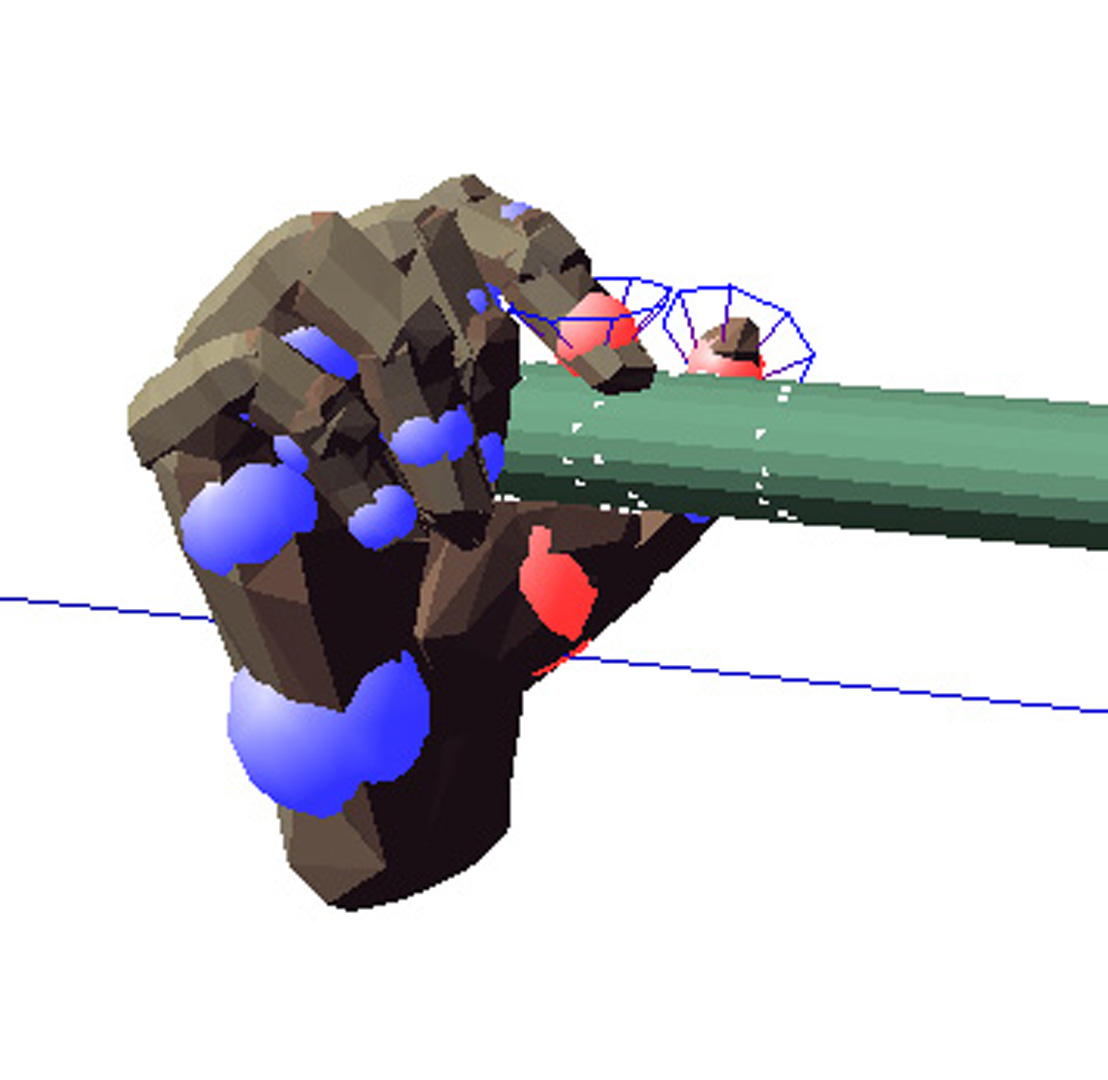
The action of grasping an object is very important for a humanoid agent with hand, evolving autonomously in a virtual world. When an agent is ordered “Grasp the object”, it has to determine which portion of the object to grasp. Therefore, it is necessary to recognize the form of the 3-dimensional geometry, and detect which portions are suitable to grasp. However, the selection is not easy because there are a lot of possible grasping methods for one object. We solve this point by two methods. One uses a neural network to find a suitable shape of the hand given a certain shape to grasp. The second is a technique to calculate the stability of grasping in robotics.
In this sketch, our main contributions are as follows: 1) detecting the appropriate portions to be grasped on the surface of an object, assuming that the object is grasped by one hand; 2) formation of the hand shape to grasp various shaped objects. Using two proposed methods, computing grasping positions and hand shapes for each of them becomes possible.
References:
Fukuda, H., Fukumura, N., Katayama, M., And Uno, Y. 2000. Relation between object recognition and formation of hand shape: A computational approach to human grasping movements. Systems and Computers in Japan 31, 12, 1315–1326.
Miller, A. T., And Allen, P. K. 1999. Examples of 3d grasp quality computations. In IEEE International Conference on Robotics and Automation, IEEE, 1240–1246.