
“Design of a Robotic Face for Studies on Facial Perception” by Flores and Fels
Conference:
Type(s):
Entry Number: 34
Title:
- Design of a Robotic Face for Studies on Facial Perception
Presenter(s)/Author(s):
Abstract:
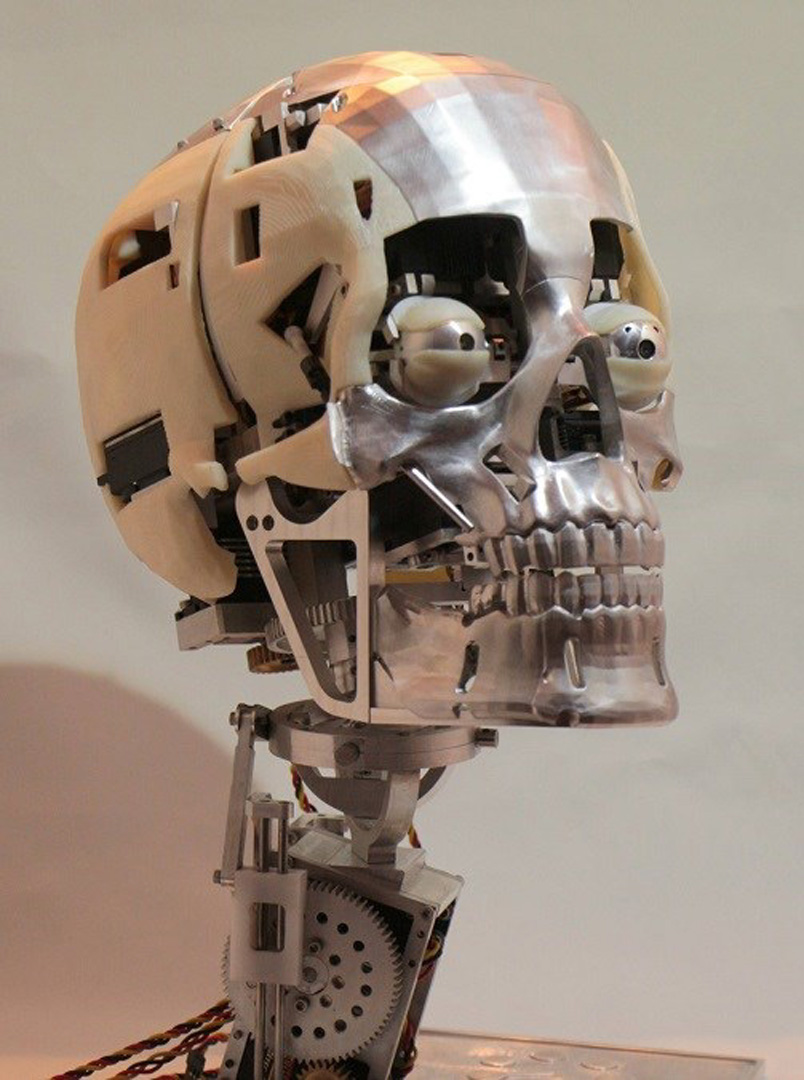
People can perceive and respond to very humanlike robots (androids) as if they were human. Thus, androids open the door to a new methodology for exploring human cognition and interaction. They can be used in place of human stimuli as an apparatus in social, cognitive, and neuroscientific experiments. However, if an android is to substitute a human being in experiments, it is essential to control for the effects of appearance by designing it to look and move much like a human being as possible. A handful of systems that have been designed under these criteria are being used effectively as human simulators in a wide range of social situations. However, the opportunities where they could be used in cognitive research are still limited. A reason for this is because some of their gestures remain impaired by unnatural kinetic and anatomical features. With this motivation, we have undertaken the research project of designing and developing a gynoid head, we call Uma [FIGURE 1]. Uma is a human-size and anatomically accurate gynoid face that aims to overcome the most important mechanical shortcoming of current android technology.
References:
- Flores, E., Fels, S., Vatikiotis-Bateson, E. (2007). Chew on this: Design of a 6 DOF anthropomorphic robotic Jaw. In IEEE RO-MAN 2007, 16th IEEE International Symposium on Robot & Human Interactive Communication. P. 648–653.
- Flores, E., Fels, (2014). A Novel Robotic Neck for Realizing and Anatomically Accurate Android Face Targeting Autism Research. To appear in proceedings of IEEE RO-MAN 2014, 23th IEEE International Symposium on Robot & Human Interactive Communication.