
“Computer Vision Based Navigation System for the Visually Impaired” by Rahman, Shah and Whitney
Conference:
Type(s):
Entry Number: 064
Title:
- Computer Vision Based Navigation System for the Visually Impaired
Presenter(s)/Author(s):
Abstract:
A navigation system for visually impaired people primarily involves sensing the surrounding environment and providing meaningful feedback with the aim of enhancing the mobility of the user. Researchers in this field have experimented with different approaches to sense the surrounding environment. The navigation system proposed here incorporates Computer Vision techniques. Everingham et al[1999], Rahman and Hassan [2002], Molton [1998] and others [Gavrila] have experimented with different variations of Computer Vision techniques for vision based navigation systems. The main objective of this research is to adopt novel techniques to enhance the existing methods used in navigation systems to aid the visually impaired people. The results obtained from the research are encouraging and it also demonstrates the suitability of using computer vision techniques in such navigation systems.
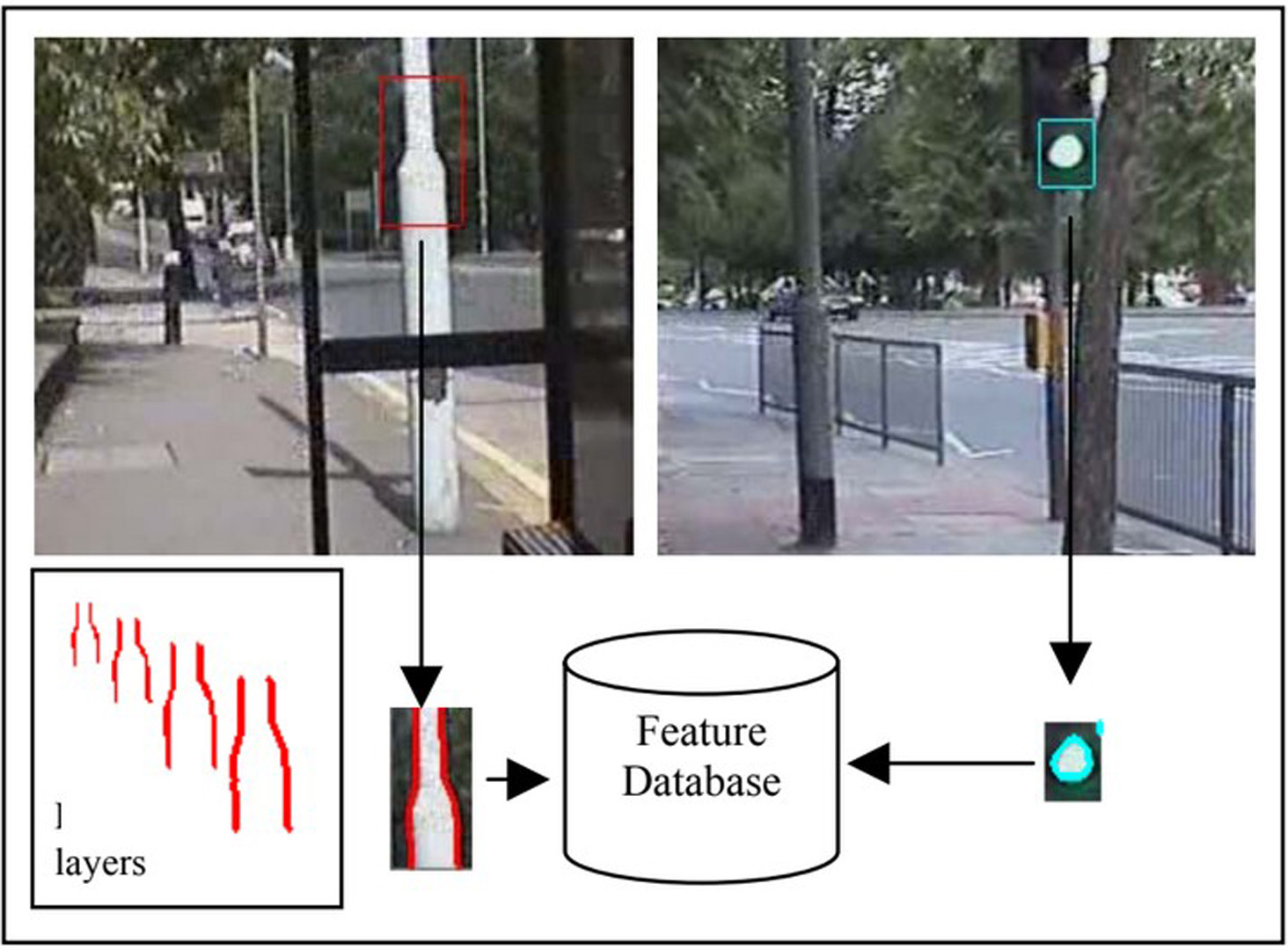
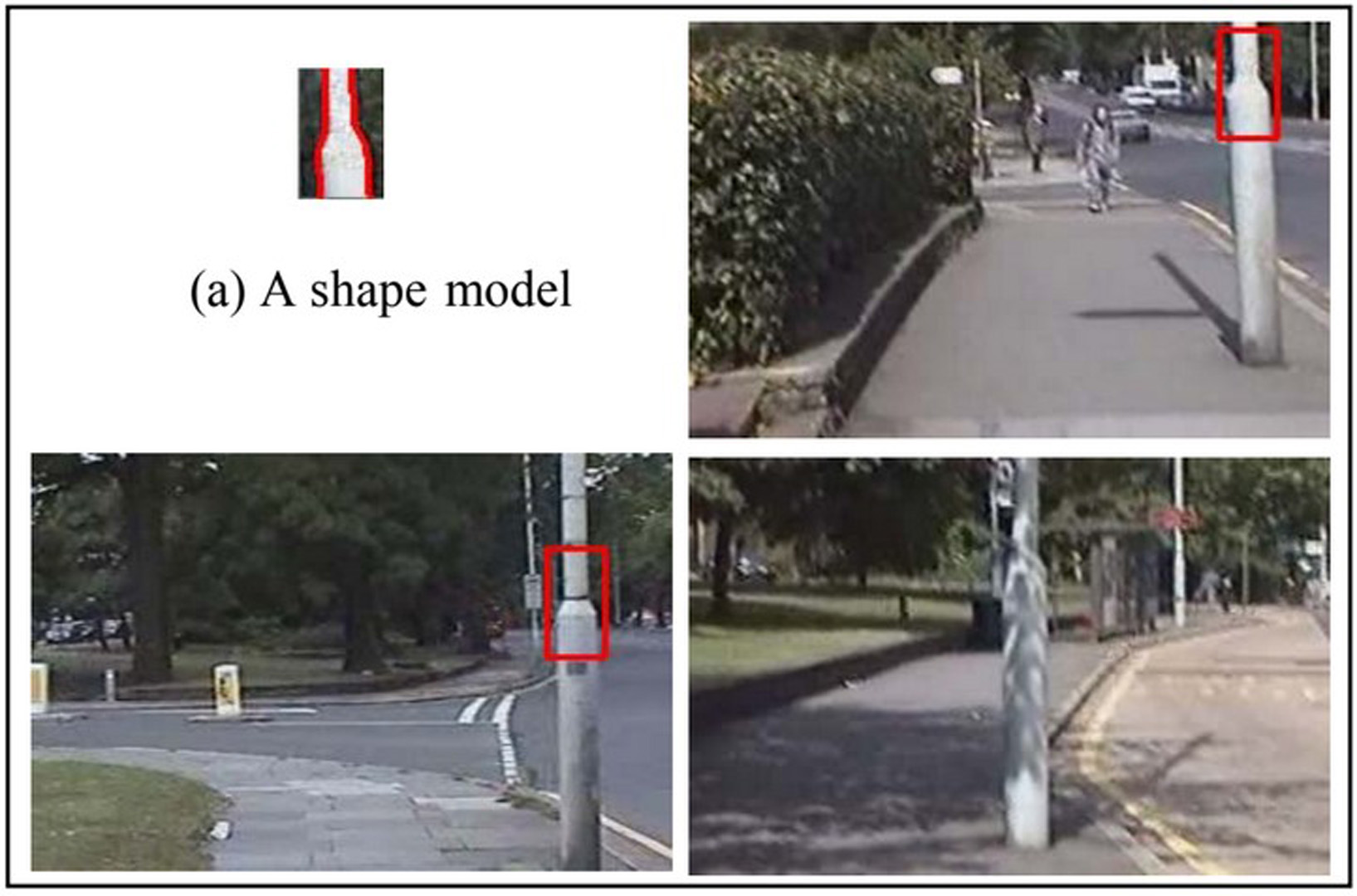
The research is looking into two aspects of the navigation system: matching key objects from image sequences and matching a predefined scene from the image database with image sequences. The key objects are the stationary objects which are usually encountered as one walks along a route. As the user travels along the route, the system tries to match the pre-defined objects from image sequences. The second option will match a pre-defined path with moving image sequences. The pre-defined path will be kept in the image database and it will be captured as required by the user. This paper is highlighting the first aspect of this research.
References:
1. Everingham, M. R., Thomas, B. T. and Troscianko, T. 1999. Head-mounted Mobility Aid for Low Vision using Scene Classification Techniques, The International Journal of Virtual Reality 3, 4, 3–12.
2. Gavrila, D. M. and Philomin, V. 1999. Real-Time Object Detection For Smart Vehicles, In Proceedings of IEEE International Conference on Computer Vision 1999, 87–93.
3. Molton, N., Se, S., Brady, J. M., Lee, D. and Probert, P. 1998. A Stereo Vision-Based Aid for the Visually-Impaired, Image and Vision Computing Journal 16, 4, 251–263.
4. Rahman, S. and Hassan, Q. K. 2003. Vision based Mobility System for Object Identification, In proceedings of CSUN’s 18th Annual International Conference – “Technology and Persons with Disabilities”, 17–22.