
“Computer Animation of the Sphere Eversion” by Max and Clifford
Conference:
Type(s):
Title:
- Computer Animation of the Sphere Eversion
Session/Category Title: Potpourri Session
Presenter(s)/Author(s):
Moderator(s):
Abstract:
In 1958, Stephen Smale, a mathematician who was then at the University of Chicago, proved that it was possible to turn the surface of a sphere inside out by a special kind of deformation, called a ‘regular homotopy’. During a regular homotopy, the surface must remain continuous, without any tears or holes; and smooth, without any creases or singularities. However, the surface is allowed to cross and pass through itself.
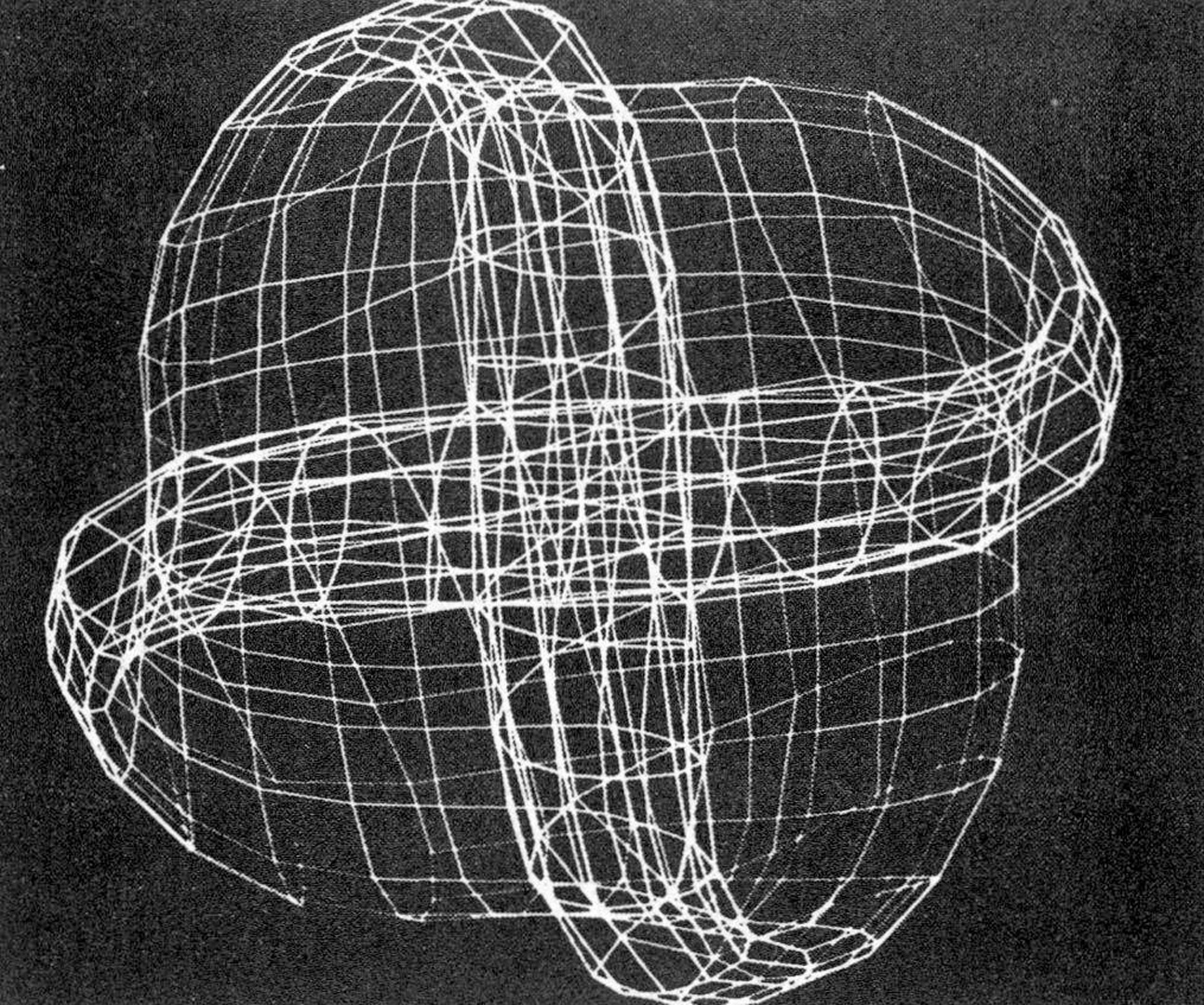
In other words, if we consider a position of the sphere as a function from the standard round spherical surface S into three dimensional space R³, this function must be continuous and smooth (C), but not necessarily one-to-one. Such a function is called an immersion, and some sample immersions of the sphere are shown in the figures here. A regular homotopy is then a continuous family of immersions, satisfying a technical condition that its partial derivatives with respect to position coordinates on S² are continuous functions of time, as well as of position on S². This is the smoothness condition which prohibits creases and kinks.
Smale actually proved that there was a regular homotopy between any two immersions of the sphere. The ordinary round sphere and an inside-out round sphere are special cases of immersions, so there must be a regular homotopy between them. Smale’s proof was by induction and in principal contained a construction of an actual regular homotopy but one so complicated that it would be impractical to visualize. Once the solution was known to be possible, a number of people tried to invent simple and easily visualized homotopies. One of these is discussed in Scientific American article [7], which contains a more extensive description of the problem, and a complete sequence of illustrations for the homotopy. However, in order to understand the deformation, the reader must imagine the motions between the illustrations in the sequence, and convince himself that they are continuous and smooth. Clearly it would be preferable to have a movie showing the whole deformation. Since each frame is a different complicated surface, this is an obvious candidate for computer animation.
The film projected at the meeting and illustrated in the figures here shows a regular homotopy developed by Bernard Morin, a blind French mathematician who was also instrumental in the creation of several other such homotopies. The one used here is among the simplest known, since it contains only fourteen critical stages, the minimum among the homotopies known at present.
There were two main problems in the creation of the film; first the mathematical definition of the homotopy to the computer, and second, the efficient computation of the frames for output through suitable hardware onto film. These will be discussed in the sections to follow.
References:
1, Armit, A. P., “Multipatch and Multiobject Design Systems,” Proceedings Royal Society, London, A 321 (1971), p. 325.
2. Birchoff, G., “Tricubic Polynomial Interpolation,” Proc. Nat. Acad. Sci. USA, Vol. 68, No. 6, p. 1162
3, Coons, S. A., Surfaces for Computer Aided Design of Space Forms, M.I.T. Project MAC TR-41 (1967).
4. Domebook 2, Shelter Publications, Salinas, California (1971).
5. Gouraud, H., Computer Display of Curved Surfaces, University of Utah, TUECH-CSC-70-101 (1970).
6. Max, N. L., “Computer Animation of Smooth Surfaces II,” Proc. 1973 UAIDE Meeting, available on microfiche from Nat’l. Microfilm Assoc.
7. Phillips, A., “Turning a Sphere Inside Out,” Scientific American, Vol. 214, No. 5, (1966), p. 112.
8. Watkins, G. S., A Real Time Visible Surface Algorithm, Com. Sci. Dept., U. Utah, UTECH-CSC-70-101 (1970).