
“Computer animation of knowledge-based human grasping” by Rijpkema and Girard
Conference:
Type(s):
Title:
- Computer animation of knowledge-based human grasping
Presenter(s)/Author(s):
Abstract:
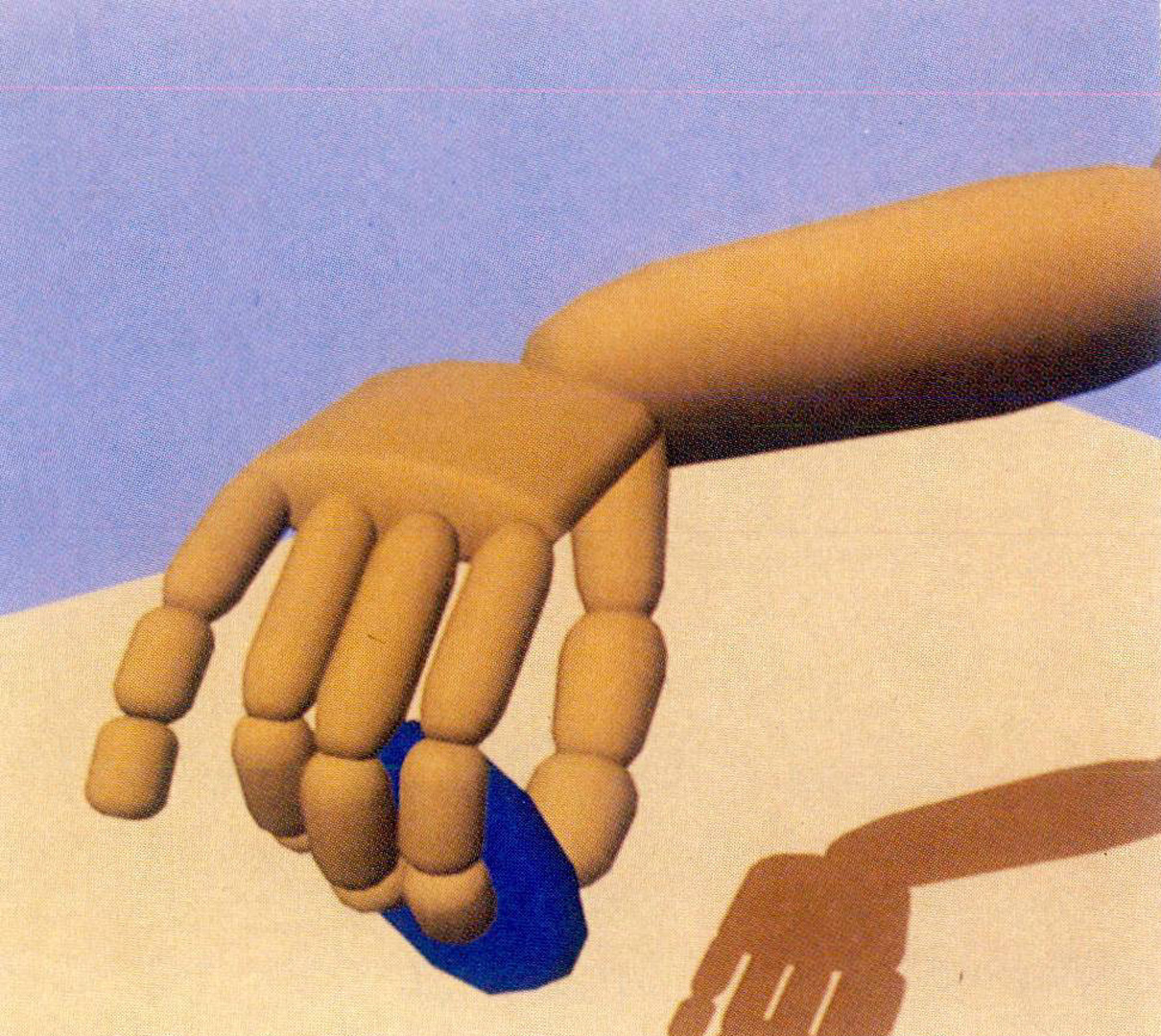
The synthesis of human hand motion and grasping of arbitrary shaped objects is a very complex problem. Therefore high-level control is needed to perform these actions. In order to satisfy the kinematic and physical constraints associated with the human hand and to reduce the enormous search space associated with the problem of grasping objects, a knowledge based approach is used. A three-phased scheme is presented which incorporates the role of the hand, the object, the environment and the animator. The implementation of a hand simulation system HANDS is discussed.
References:
1. W.W. Armstrong, M. Green and R. Lake, Near. real-time control of human figure models, Proceedings of Graphics Interface 1986
2. T.J. Axmstrong and D.B. Chaff’m, An investigation of the relationship between displacements of the finger and wrist joints and the extrinsic fmger flexor tendons, iomechanics, vol. 11, pp 119-128, Pergamon Press Ltd., 1978 (great-Britrain)
3. N.I. Badler, K.H. Mmmochehri and G. Waiters, Articulated figure positioning by multiple constraints, IEEE Computer Graphics and Animation 7(6), 1987
4. D. Baraff, Analytical Methos for Dynamic Simulation of Non-penetrating Rigid Bodies, Computer Graphics, Vol. 23, No. 3, july 1989
5. R. Barzel and A.H. Barr, A Modeling system based on dynamic constraints, Proc. Siggraph, vo122., No. 4, August 1988
6. R.A. Brooks, Planning Collision Free Motions for Pick-and-Place Operations, The international Journal of Robotics Research, Vol.2, No. 4, Winter 1983
7. J. Denavit and R. Hartenberg, A kinematic Notation for Lower Pair Mechanisms Based on Matrices, I. App. Mech., Vol. 77, pp 215-221, 1955
8. S.S. Fisher, M. McGreevy, J. Humphries and W. Robinett, Virtual environment display system, Proc 1986 ACM Workshop on Interactive Graphics, October 23-24, Chapel Hill, North Carolina.
9. K.S. Fu, R.C. Gonzalez and C.S.G. Lee, Robotics: Control, Sensing, Vision and intelligence, McGraw- Hill Book Company, 1987
10. E. Gilbert, D.W. Johnson and S. Sathiya Kee~thi, A fast Procedure for Computing the Distance Between Complex Objects in Three-Dimensional Space, IEEE Journal of Robotics and Automation, Vol. 4, No. 2, april 1988
11. M. Girard, Interactive design of 3D Computer Animated Legged Animal Motion. Computer Graphics and Applications june 1987.
12. M. Girard, Constrained optimization of articulated animal movement in computer animation, Making them move (mechanics, control, and animation of articulated figures), Eds: Badler, Barsky and Zeltzer, Morgan Kaufmann Publishers, 1990
13. J.P. Gourret, N.M. Thalmann, D. Thalmann, Simulation of object and human skin deformations in a grasping task., ACM Siggraph Proe, e~dings 1989.
14. T. lberail, J. Jackson, L. Labbe and R. Zampang, Knowledge-based prehension: Capturing Human Dexterity, Proceedings of the IEEE on Robotics and Automation 1988. pp 82-87.
15. P. Isaacs and R. Cohen, Controlling dynamic simulation with kinematic constraints, behavior functions and inverse dynamics, Computer Graphics, ACM Siggraph Proceedings 1987
16. H. iwata, Artificial Reality with force-feedback: development of desk-top virtual space with compact master manipulator, Computer Graphics, ACM Siggraph Proceedings 1990
17. M. Kirckanski and M. Vukobratovic, A method for optimal synthesis of manipulation robot trajectories, Trans. ASME, J. Dynamic Systems, Measurements and Control 104, 1982
18. C.A. Klein and C.H. Huang, Review of pseudoinverse control for use with kinematically redundant manipulators, IEEE Transactions on systems, Man and Cybernetics, SMC-13(2), march/april 1983
19. J.U. Korein and N.I. Badler, Techniques for generating the goal-directed motion of articulated structures, IEEE Computer Graphics and applications, pp 71-81, 1982
20. J.M.F. Lamdsmeer, Anatomical and functional investigations on the articulations of the human fingers, Acta anatomica, suppl. 25, 1-69, 1955
21. J.M.F. Landsmeer, A report on the coordination of the interphalangeal joints of the human finger and it’s disturbances, Acta Morphologica Neerlando-Scandinavica 2. 59-84, 1958
22. J.M.F. Landsmeer, The coordination of finger joint motions, J. Bone Jnt. Sur. 45, 1654-1662, 1963
23. A. Liegeois, Automatic Supervisory control of the configuration and behavior of multibody mechanisms, IEEE Transactions on systems, Man and Cybernetics, SMC-7 (12), december 1977
24. C. Lin, P. Chang and J. Luh, Formulation and optimization cubic polynomial joint trajectories for industrial robots, 1EEE Trans. Automatic Control AC-28(12), 1983
25. T. Lozano-Perez, Spatial Planning: a Configuration Approach, IEEE Transactions on Computers, Vol C-32, No.2, feb 1982
26. A.A. Maciejewski, Dealing with the illconditioned equations of motion for articulated figures, IEEE Computer Graphics and Applications, May 1990
27. Vision, Freeman Press, San Fransisco, California, 1982
28. M. Moore and J. Wilhelms, Collision detection and response for computer animation, Proc. ACM Siggraph 1988, Computer Graphics 22(4)
29. J. Paillard, The contribution of perifpheral and central vision to visualUy guided reaching, Analysis of visual behavior, (eds: Ingle, Goodale, Mansfield) Cambridge, Mass. MIT Press, pp 367-385, 1982
30. D. Pletinckx, Quatemion calculus as a basic tool in computer graphics, The Visual Computer 1989
31. M. Girard and H. Rijpkema, efficient collision detection for convex and concave polyhedral objects, to be submitted.
32. G. Sahar and J. Hollerbach, Plam~g of minimum time trajectories for robot arms, IEEE International Conference on Robotics and Automation, march 1985
33. P. Schoner and D. Zeltzer, The virtual erector set: Dynamic simulation with linear recursive constraint propagation. Prec. 1990 Symposium on Interactive 3D Graphics March 25-28, Snowbird, Utah
34. K. Shoemake, Animating Rotation with Quatemion Curves, ACM Siggraph Proceedings 1985
35. H. Tan and R. Potts, Minimum time trajectory planner for discrete dynamic robot model with dynamic constraints, IEEE J. of Robotics and Automation 4(2), 1988
36. R. Tomovic, G.A. Bekey and W.J. Karplus, A strategy for grasp synthesis with multifmgered robot hands, Proceedings of the IEEE on Robotics and Automation 1987. pp 83-89.
37. M. Walker and D. Orin, Efficient dynamic simulation of robot mechanisms, Trans. ASME, J. Dynamic Systems, Measurements and Control, 1982
38. G. Wang and H.E. Stephanou, Chopstick manipulation with an articulated hand: a qualitative analysis, Prcw.eedings of the IEEE on Robotics and Automation 1988. pp 94-99.
39. D.E. Whitney, Resolved motion rate control of manipulators and human protheses, IEEE Transactions on Man-Machine systemsm MMS-10(2) pp 47-53, june 1969
40. J. Wilhelms, Using dynamic analysis for realistic animation of articulated bodies, IEEE Computer Graphics and Applications 7(6), 1987
41. A. Witkin and M. Kass, Spacetime constraints, ACM Computer Graphics, Siggraph Proceedings 1987