
“A Scalable Approach to Control Diverse Behaviors for PhysicallySimulated Characters” by Won, Gopinath and Hodgins
Conference:
Type(s):
Title:
- A Scalable Approach to Control Diverse Behaviors for PhysicallySimulated Characters
Session/Category Title: Crowds, Paths, and Puzzles
Presenter(s)/Author(s):
Abstract:
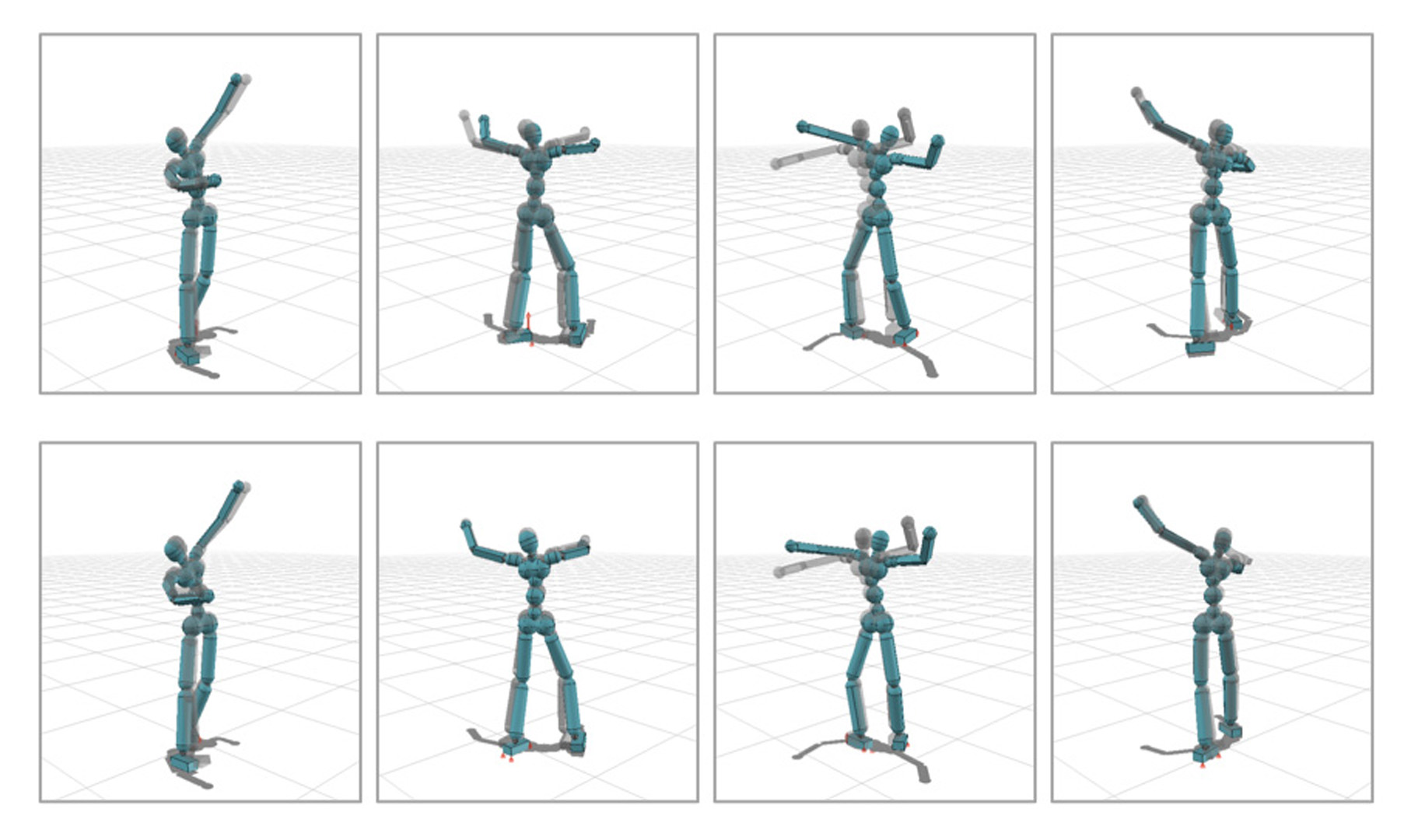
Human characters with a broad range of natural looking and physically realistic behaviors will enable the construction of compelling interactive experiences. In this paper, we develop a technique for learning controllers for a large set of heterogeneous behaviors. By dividing a reference library of motion into clusters of like motions, we are able to construct experts, learned controllers that can reproduce a simulated version of the motions in that cluster. These experts are then combined via a second learning phase, into a general controller with the capability to reproduce any motion in the reference library. We demonstrate the power of this approach by learning the motions produced by a motion graph constructed from eight hours of motion capture data and containing a diverse set of behaviors such as dancing (ballroom and breakdancing), Karate moves, gesturing, walking, and running.