
“A real-time sequential algorithm for human joint localization” by Cameron and Lasenby
Conference:
Type(s):
Title:
- A real-time sequential algorithm for human joint localization
Presenter(s)/Author(s):
Abstract:
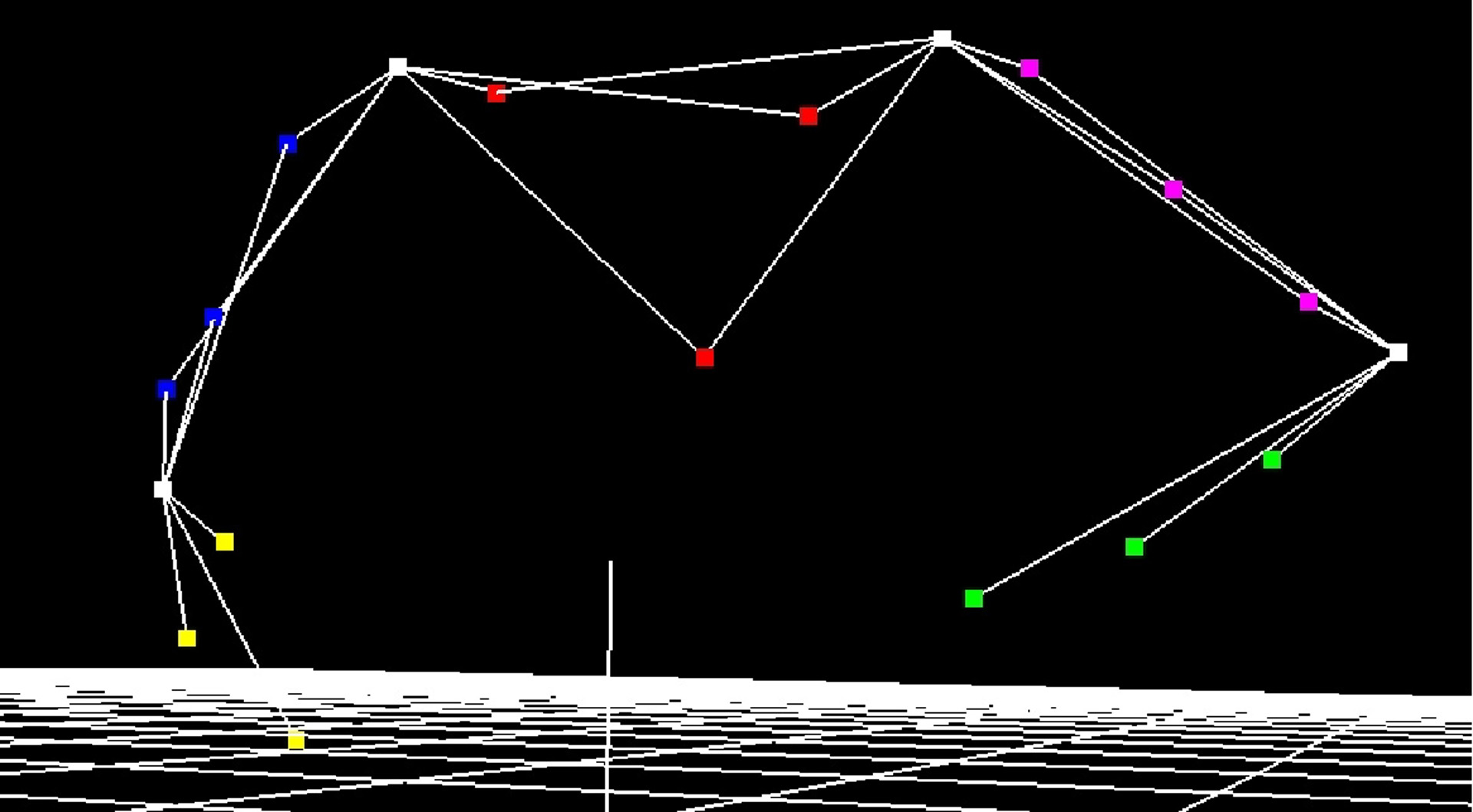
Locating the CoRs from optical MoCap data is important in both computer graphics and rehabilitation medicine. It is a crucial step in acquiring a skeleton from raw motion capture data. Previous methods suffer from optimization steps which grow with the amount of data supplied [Gamage and Lasenby 2002; Kirk et al. 2005] and both a lack of enforcement of rigid body constraints and the necessity of user feedback to set marker weights [Silaghi et al. 1998]. Here we consider a formulation of the problem that takes full advantage of the simplification that all markers on a body segment are attached to a rigid body. The following formulation uses geometric algebra to simplify understanding and implementation.
References:
1. Gamage, S. H. U., and Lasenby, J. 2002. New least squares solutions for estimating the average centre of rotation and the axis of rotation. Journal of Biomechanics 35, 87–93.]]
2. Kirk, A., O’Brien, J., and Forsyth, D. 2005. Skeletal parameter estimation from optical motion capture data. In Proceedings of CVPR.]]
3. Silaghi, M., Plänkers, R., Boulic, R., Fua, P., and Thalmann, D. 1998. Local and global skeleton fitting techniques for optical motion capture. In Proceedings CapTech.]]