
“A framework for haptic rendering of large-scale virtual environments” by Glencross and Hubbold
Conference:
Type(s):
Talk Type(s):
Title:
- A framework for haptic rendering of large-scale virtual environments
Session/Category Title:
- Haptics and Sound
Presenter(s)/Author(s):
Moderator(s):
Abstract:
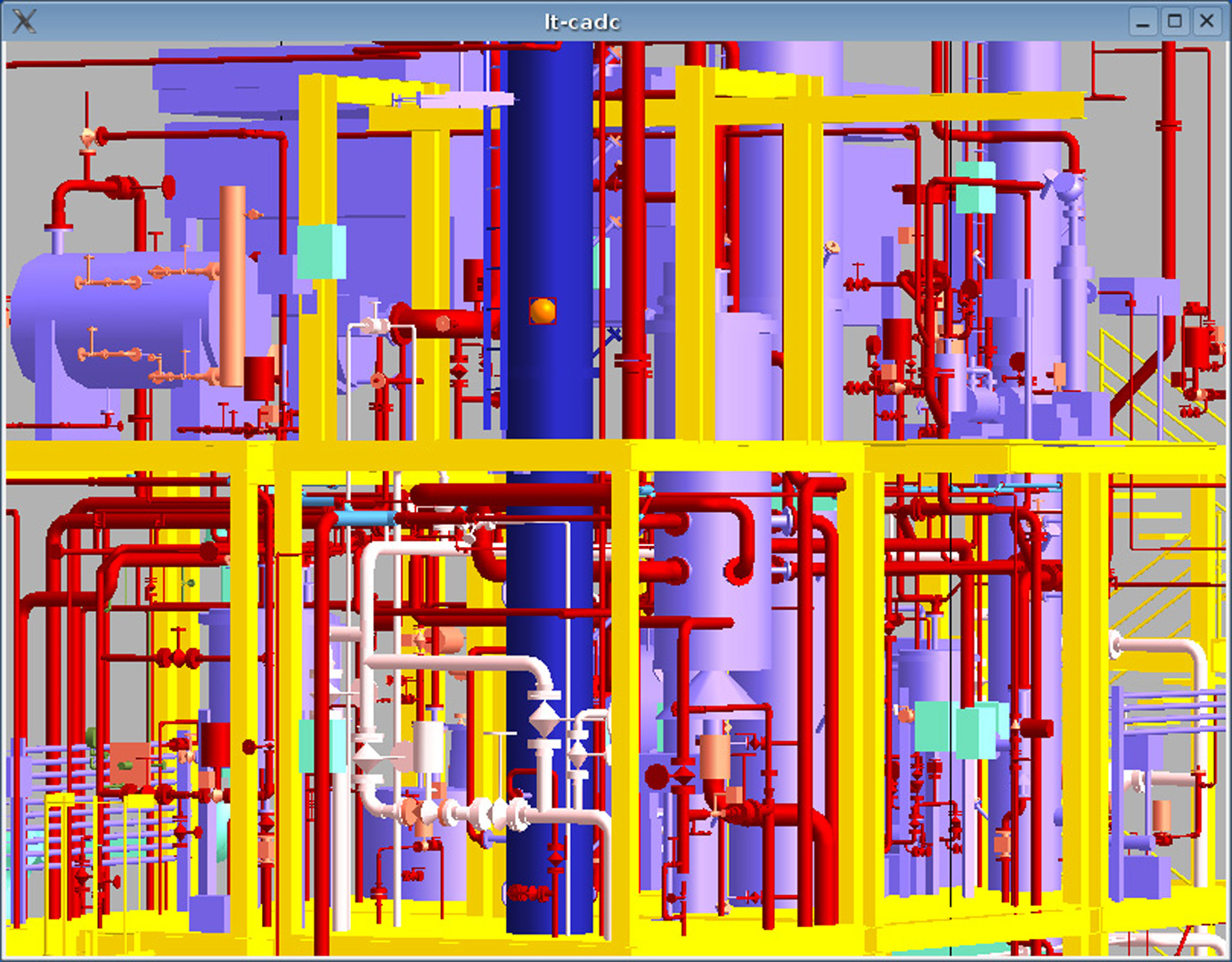
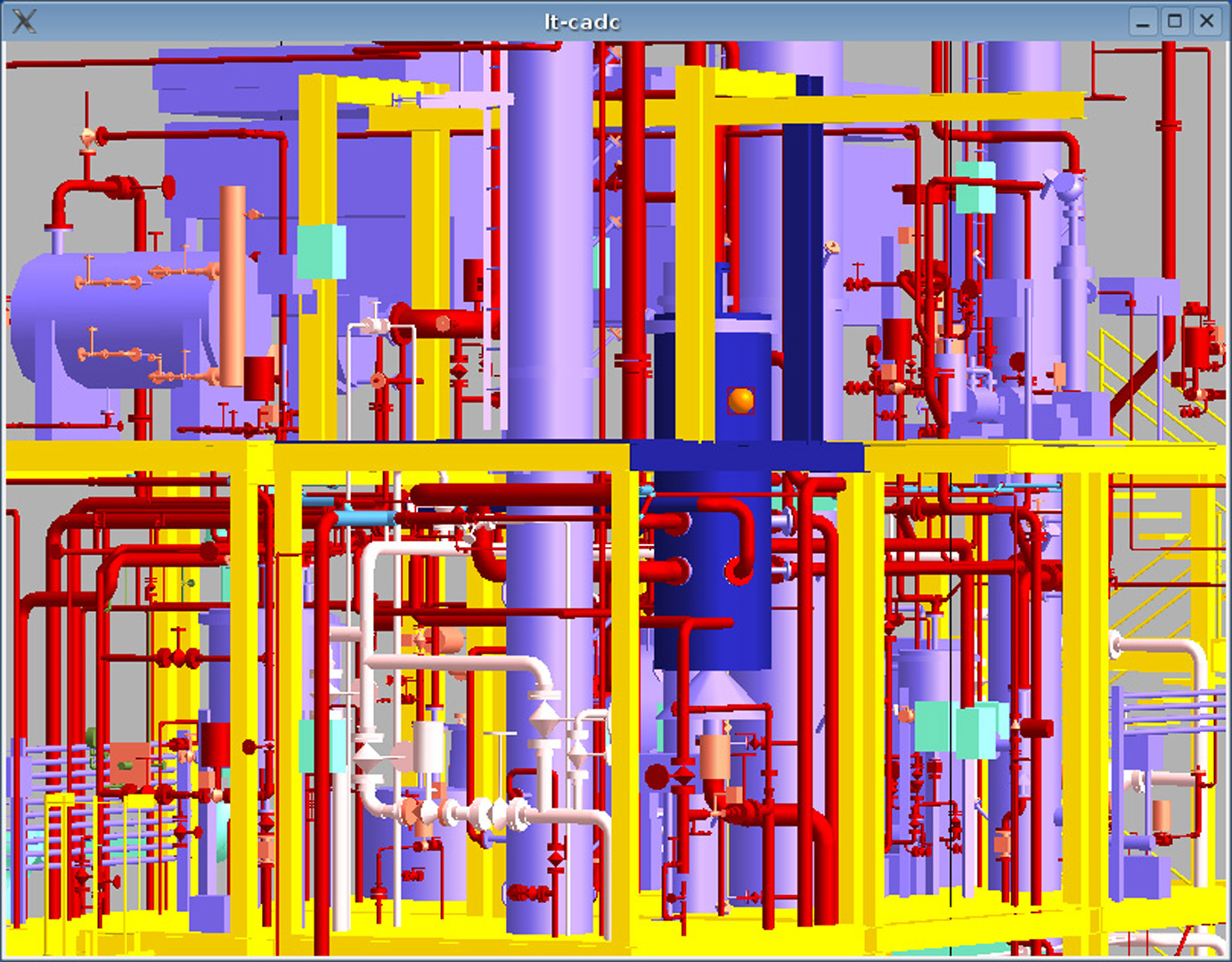
The CoHap3D framework is a prototype middle-ware system for haptically enabling 3D VR applications. It is aimed at haptic ren- dering of large-scale models in a single or multi-user context.
CoHap3D incorporates a 3D graphics system, MAVERIK++, based on our own GNU/MAVERIK library but modernised to ex- ploit recent developments in graphics hardware. Further, a haptics framework is implemented which makes use of spatial partitioning techniques to manage the complexity of haptic rendering through a client-side haptic cache.
The system currently supports the FCS HapticMASTER device but can easily be extended to incorporate other haptic devices.
The only other similar framework currently under development is Stanford University and the Universita’ di Siena’s CHAI 3D1 . GHOST provides a lower-level framework than CoHap3D and commercial systems such as Reachin’s API [Reachin 2004] and Novint’s e-Touch [etouch 2004] toolkit do not provide sufficient support for building large-scale VR applications.
In this sketch we focus primarily on the support for haptic ren- dering of large-scale virtual environments in the CoHap3D frame- work
References:
Burdea, G. C. 1996. Force and Touch Feedback for Virtual Reality. John Wiley and Sons, Inc.
Clark, J. H. 1976. Hierarchical geometric models for visible surface algorithms. Communications of the ACM 19, 10 (Oct.), 547–554.
ETOUCH, 2004. etouch home page. Online document. <http://www.etouch3d.org/index.html>.