
“3D haptic shape perception using a 2D device” by Han, Yamashita and Fujishiro
Conference:
Type(s):
Interest Area:
- Application
Title:
- 3D haptic shape perception using a 2D device
Session/Category Title: Devices & Interaction
Presenter(s)/Author(s):
Abstract:
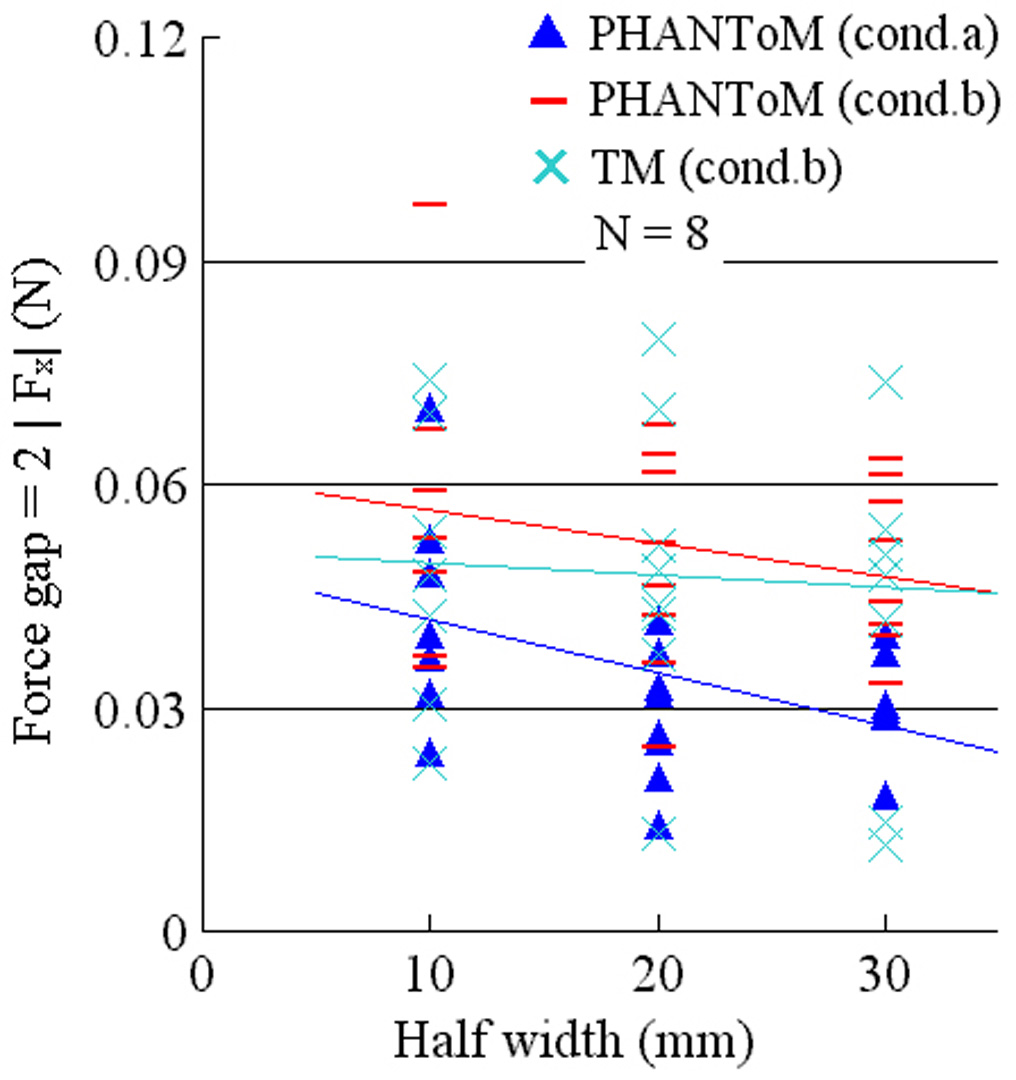
Is a 2-dimensional (2D) force feedback device capable of presenting 3-dimensional (3D) shapes? The answer is a qualified “yes.” “Force shading”, a haptic counterpart of bump mapping in computer graphics, presents a non-flat shape on a nominally flat surface by varying the force vector direction in haptic rendering [Morgenbesser and Srinivasan 1996][Robles-De-La-Torre and Hayward 2001]. To our knowledge, such phenomena have been qualitatively measured only by 3D devices, and a quantitative comparison to 2D devices has not been made. We compare thresholds of human shape perception of the plane experimentally, using 2D and 3D force feedback devices.
References:
1. Morgenbesser, H., and Srinivasan, M. 1996. Force Shading for Haptic Shape Perception. In Proc. ASME Dynamics Systems and Control Division, 407–412.
2. Robles-De-La-Torre, G., and Hayward, V. 2001. Force Can Overcome Object Geometry in the Perception of Shape through Active Touch. Nature 412, 26, 445–448.
3. TM URL. http://www.fujixerox.co.jp/tangible_mouse/