
“The Programming of Robots by Haptic Means” by Teh, Kato, Kunieda and Yamada
Conference:
- SIGGRAPH 2008
-
More from SIGGRAPH 2008:


Type(s):
Entry Number: 33
Title:
- The Programming of Robots by Haptic Means
Presenter(s):
Description:
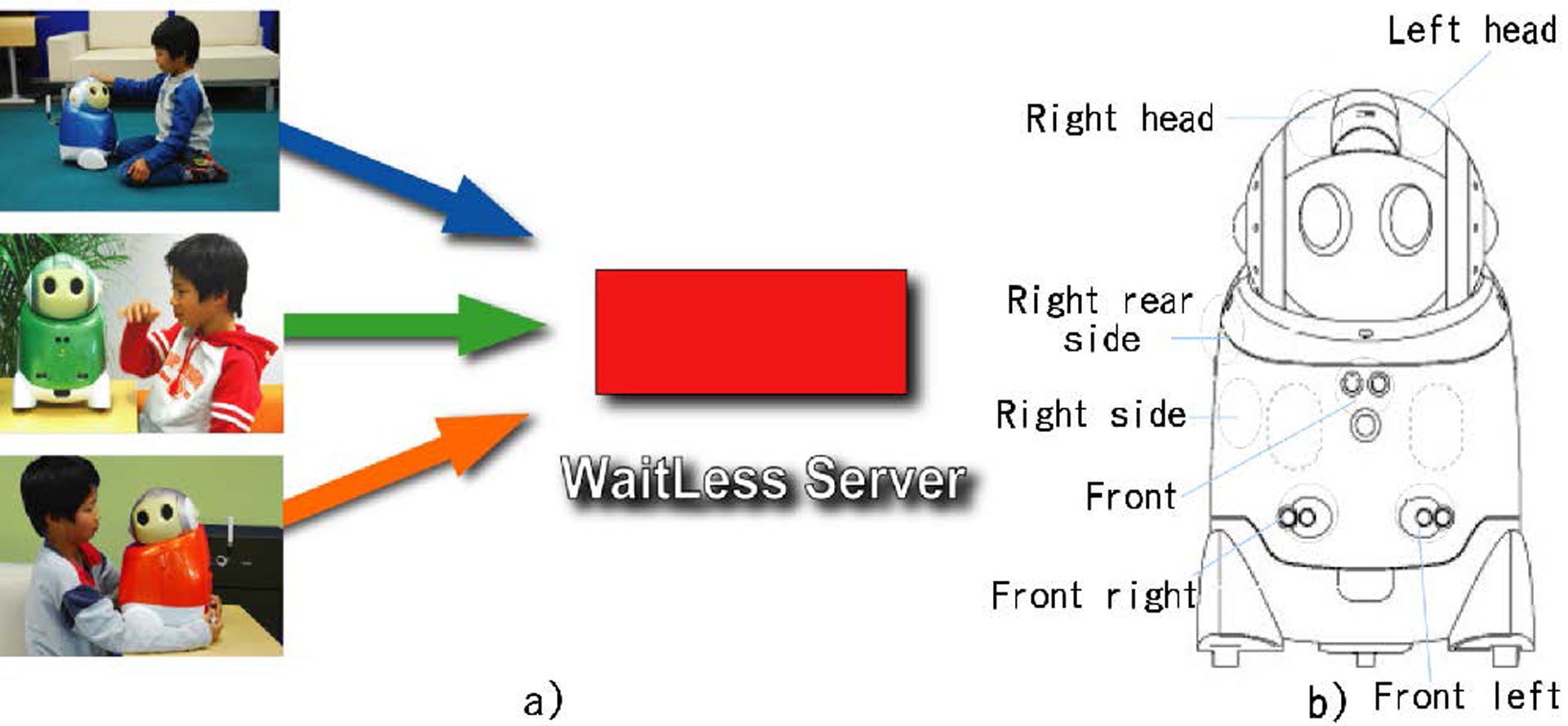
According to the theory of constructivism, children can learn a lot not just from being taught but also through their play experiences, especially when they are designing and creating things. By playing with blocks, for example, children learn by exploration and experimentation how the physical world works [Piaget 1955]. It is also important for learners with different knowledge to collaborate in order to arrive at a shared understanding [Duffy and Jonassen 1992]. Based on these ideas, our objective has been to develop a system to program robots using the sense of touch. We believe that enabling robot programming through physical touch encourages play, learning, sharing and collaboration.
To the best of our knowledge, there is no previous example which applies robot programming through touch for children’s learning. Grunwald developed a system for programming a mobile service robot by touch, which is more about demonstrating to a robot arm the intended actions for it to repeat [Grunwald et al. 2003]. Also, the system is not focused on learning and playing for children, but more for an industrial environment.
Other Information:
References
DUFFY, T. M., AND JONASSEN, D. H. 1992. Constructivism and the Technology of Instruction: A Conversation. Lawrence Erlbaum.
GRUNWALD, G., SCHREIBER, G., ALBU-SCHAFFER, A., AND HIRZINGER, G. 2003. Programming by touch: the different way of human-robot interaction. IEEE Transactions on Industrial Electronics 50, 4 (Aug.), 659–666.
PIAGET, J. 1955. The Construction of Reality in the Child. Routledge.